公路施工用路面喷淋养护设备及其使用方法与流程
1.本发明涉及公路养护技术领域,尤其涉及一种公路施工用路面喷淋养护设备及其使用方法。
背景技术:
2.早期的施工、养护工作,一般是用简单的工具和人力或畜力操作。随着机械工业的发展,蒸汽机和内燃机等动力机械广泛应用于施工中,并出现各种单用机械和联合操作机械。在筑路机械中,繁重、量大的工程所使用的机械,例如土石方的挖掘、运输、压实等使用的机械,正向着多用途、大功率的方向发展;路面铺装机械向着自动就地加工,提高废旧料利用率,简化工序,一次完成的大功率大型机械的方向发展;养路机械则向着一机多用和小型化的方向发展。在公路施工过程中,若混凝土浇筑完成后,需要定时对混凝土路面进行喷水养护,避免混凝土水分蒸发过快形成脱水现象,甚至导致混凝土开裂的问题,影响路面质量。
3.但是,现有的公路施工用喷淋养护设备无法自主沿预设路线移动喷淋,需要人工实时操控,较为繁琐。
技术实现要素:
4.本发明的一个目的是解决至少上述问题,并提供至少后面将说明的优点。
5.本发明还有一个目的是提供公路施工用路面喷淋养护设备及其使用方法,实现了养护设备沿规划路线自主完成喷淋工作,从而有效的避免了现有的公路施工用喷淋养护设备无法自主沿预设路线移动喷淋,需要人工实时操控,较为繁琐的问题。
6.为实现上述目的和一些其他的目的,本发明采用如下技术方案:
7.一种公路施工用路面喷淋养护设备,包括
8.底盘,以及设置在所述底盘前端两侧的前车轮,和设置在所述底盘后端两侧的后车轮;
9.光敏传感器,其安装在所述底盘下表面的前端,且所述光敏传感器设置有两个;
10.模组箱,其安装在所述底盘的上表面,所述模组箱的前端设置有舵机,所述模组箱后端的两侧设置有编码电机;
11.车架,其安装在所述底盘的外部;
12.供电系统,其安装在所述车架上表面的后端,所述供电系统的前端安装有配电柜,所述配电柜的内部安装有继电器;
13.水箱,其安装在所述车架上表面的前端,所述水箱的上表面设置有转动基座;
14.旋转台,其安装在所述转动基座的上方,所述旋转台的上表面的两侧均安装有支板;
15.雾炮机,其安装在两侧所述支板之间,且与所述支板转动连接;
16.摄像头,其安装在所述水箱上表面的外壁上。
17.优选的是,所述模组箱的内部安装有单片机芯片、电机驱动模组和无线传输模块,所述单片机芯片的输出端与电机驱动模组的输入端电性连接,所述单片机芯片通过无线传输模块与移动终端双向连接。
18.优选的是,所述电机驱动模组的输出端与编码电机的输入端电性连接,所述编码电机的输出端与后车轮传动连接,所述舵机的输出端上安装有联动杆,所述联动杆的两端均通过转向机构与前车轮传动连接,所述光敏传感器和摄像头的输出端均与单片机芯片的输入端电性连接。
19.优选的是,所述转动基座上表面的一侧安装有第一步进电机,所述转动基座的内部安装有从动齿轮,且从动齿轮的齿轮轴与旋转台固定连接,所述从动齿轮的下端通过轴承与水箱外壁转动连接,所述从动齿轮的一侧设置有主动齿轮,且主动齿轮的齿轮轴与第一步进电机的输出端键连接,所述雾炮机的后端设置有第二步进电机,且第二步进电机与旋转台固定连接,所述第二步进电机通过驱动室与雾炮机传动连接,所述电机驱动模组的输出端与第一步进电机和第二步进电机的输入端电性连接。
20.优选的是,所述水箱的内部安装有潜水泵,所述雾炮机内部的前端安装有高压风机,所述高压风机的后端安装有风机马达,所述雾炮机内部的后端安装有喷淋盘,所述喷淋盘的前端面上安装有雾化喷头,所述雾化喷头的上端通过输水管与潜水泵的出水口相连通,所述单片机芯片的输出端通过继电器与风机马达和潜水泵的输入端电性连接。
21.优选的是,所述水箱的一侧安装有排水阀,所述水箱上表面的一侧安装有进水阀,所述水箱的前端设置有液位观察窗,所述液位观察窗的一侧设置有刻度线。
22.优选的是,所述车架的后端安装有集尘盒,所述底盘下表面的后端安装有清扫机构,所述清扫机构的上端安装有异步电机,所述异步电机的输出端贯穿并延伸至清扫机构的内部,且安装有抽风叶轮,所述抽风叶轮的下端安装有毛刷杆,所述清扫机构通过导风管与集尘盒相连通。
23.优选的是,所述集尘盒的后端安装有除尘盖,所述除尘盖的下端通过铰链与集尘盒转动连接,所述除尘盖的上端通过螺钉与集尘盒螺纹连接,所述除尘盖的外壁上安装有金属防护网,所述金属防护网的内壁上安装有无纺布滤网。
24.优选的是,所述供电系统的外壁上安装有散热板,所述散热板的外壁上设置有散热百叶,且散热百叶设置有若干个,所述供电系统的上端安装有光伏太阳能板,所述光伏太阳能板通过支架与供电系统固定连接,所述供电系统的内部安装有光伏控制器、蓄电池和光伏逆变器,所述光伏太阳能板的输出端通过光伏控制器与蓄电池的输入端电性连接,所述蓄电池的输出端通过光伏逆变器与配电柜的输入端电性连接。
25.优选的是,所述公路施工用路面喷淋养护设备的使用方法,包括以下步骤:
26.步骤一:首先,依靠划线机在施工公路上沿预定的喷洒路线划出由粉状物料构成的白线;
27.步骤二:将喷淋养护设备放置在白线起点,依靠移动终端向单片机芯片上的无线传输模块发出信号,使其通过电机驱动模组控制编码电机运行,让小车向前行驶;
28.步骤三:行驶过程中,由底盘前端的两组光敏传感器对路面实施感应,并通过投射到路面和白线部分反射率的不同,对应接收到的两路光敏电阻信号进行比较,控制两则编码电机和舵机运转,从而修正设备的前进方向,使其始终沿白线前进;
29.步骤四:前进时,通过远程控制驱动水箱内的潜水泵运行,将水输送至雾炮机内,实现对当前路线混凝土路面的大面积喷淋工作,雾炮机喷淋角度以及方向可通过第一步进电机和第二步进电机的传动作用调整,当前的喷淋状况则由水箱上的摄像头实时传输至移动终端查看;
30.步骤五:当设备行驶到白线终点时,可根据需求往返操作,对混凝土路面进行多次喷淋,在最后一次喷淋工作时,可驱动底盘内的清扫机构,依靠毛刷杆在行驶过程中扫除白色粉尘,并依靠抽风叶轮将其抽送至集尘盒内。
31.本发明至少包括以下有益效果:
32.1、本发明通过采用双电机驱动车体后轮运转,并由舵机控制前轮转向,在使用设备前,依靠划线机在施工公路上沿预定的路线划出粉末状白线,并将喷淋养护设备放置在白线起点,依靠移动终端向单片机芯片上的无线传输模块发出信号,使其通过电机驱动模组控制编码电机运行,让车体向前行驶,行驶过程中,由底盘前端的两组光敏传感器对路面实施感应,并将检测信号发送至单片机芯片,由芯片通过投射到路面和白线部分反射率的不同,对应接收到的两路光敏电阻信号进行比较,控制两则编码电机和舵机运转,从而修正设备的前进方向,使其始终沿规划的线路前进,配合雾炮机实现规定路线的自动喷淋工作,避免了现有的公路施工用喷淋养护设备无法自主沿预设路线移动喷淋,需要人工实时操控,较为繁琐的问题发生。
33.2、通过在底盘的后端安装清扫机构,因规划路线时采用白色粉末作为划线原料,所以在最后一次驱动设备沿路线喷淋时,可启动清扫机构,在异步电机的作用下带动抽风叶轮以及毛刷杆旋转,依靠毛刷杆在行驶过程中扫除白色粉尘,并依靠抽风叶轮将其抽送至集尘盒内,避免粉尘污染。
34.3、通过将雾炮机安装于旋转台上,在使用时,第一步进电机的输出端可通过齿轮啮合结构带动雾炮机水平旋转,从而调节喷淋方向,而第二步进电机则能在驱动室内皮带机构的传动作用下,带动雾炮机上下转动,从而调节喷淋角度,两者协同作用,大大提高的喷淋机构的灵活性,显著提升了养护效率。
附图说明
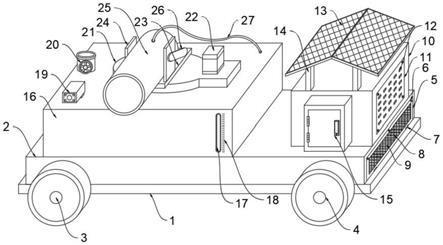
35.图1是本发明提供的公路施工用路面喷淋养护设备的整体结构示意图;
36.图2是本发明提供的公路施工用路面喷淋养护设备的正面局部结构示意图;
37.图3是本发明提供的公路施工用路面喷淋养护设备的雾炮机内部结构示意图;
38.图4是本发明提供的公路施工用路面喷淋养护设备的底盘内部结构示意图;
39.图5是本发明提供的公路施工用路面喷淋养护设备的清扫机构结构示意图;
40.图6是本发明提供的公路施工用路面喷淋养护设备的原理图。
具体实施方式
41.下面结合附图对本发明做详细说明,以令本领域普通技术人员参阅本说明书后能够据以实施。
42.如图1
‑
6所示,一种公路施工用路面喷淋养护设备,包括:底盘1,以及设置在所述底盘1前端两侧的前车轮3,和设置在所述底盘1后端两侧的后车轮4;光敏传感器47,其安装
在所述底盘1下表面的前端,且所述光敏传感器47设置有两个;模组箱40,其安装在所述底盘1的上表面,所述模组箱40的前端设置有舵机37,所述模组箱40后端的两侧设置有编码电机41;车架2,其安装在所述底盘1的外部;供电系统10,其安装在所述车架2上表面的后端,所述供电系统10的前端安装有配电柜15,所述配电柜15的内部安装有继电器50;水箱16,其安装在所述车架2上表面的前端,所述水箱16的上表面设置有转动基座21;旋转台23,其安装在所述转动基座21的上方,所述旋转台23的上表面的两侧均安装有支板24;雾炮机25,其安装在两侧所述支板24之间,且与所述支板24转动连接;摄像头19,其安装在所述水箱16上表面的外壁上。
43.在上述方案中,底盘采用双电机智能驱动,由舵机控制转向,行驶过程中,由底盘前端的两组光敏传感器对路面实施感应,并通过投射到路面和指定线路部分反射率的不同,对应接收到的两路光敏电阻信号进行比较,控制两则编码电机和舵机运转,从而修正设备的前进方向,达到自动行驶的效果,装置的喷淋工作由雾炮机实现,由水箱供水使用,其安装于旋转台上,可通过步进电机的传动作用旋转,调节喷淋方位,喷洒时,摄像头能够将工作状况实时传输至单片机芯片,由无线传输模块传输至移动终端查看。
44.一个优选方案中,所述模组箱40的内部安装有单片机芯片48、电机驱动模组49和无线传输模块51,所述单片机芯片48的输出端与电机驱动模组49的输入端电性连接,所述单片机芯片48通过无线传输模块51与移动终端双向连接。
45.在上述方案中,电机驱动模组由多块l298n模块构成,用于控制设备内的电机机构,单片机芯片的型号为stm32,可通过无线传输模块与移动终端连接,实现远程控制。
46.一个优选方案中,所述电机驱动模组49的输出端与编码电机41的输入端电性连接,所述编码电机41的输出端与后车轮4传动连接,所述舵机37的输出端上安装有联动杆38,所述联动杆38的两端均通过转向机构39与前车轮3传动连接,所述光敏传感器47和摄像头19的输出端均与单片机芯片48的输入端电性连接。
47.在上述方案中,光敏传感器能够对路面以及规划路线实施感应,并将接收信号发送至单片机芯片,由单片机芯片根据接收到的光敏电阻信号不同进行比较,控制两则编码电机和舵机运转,修正设备方向。
48.一个优选方案中,所述转动基座21上表面的一侧安装有第一步进电机22,所述转动基座21的内部安装有从动齿轮29,且从动齿轮29的齿轮轴与旋转台23固定连接,所述从动齿轮29的下端通过轴承30与水箱16外壁转动连接,所述从动齿轮29的一侧设置有主动齿轮31,且主动齿轮31的齿轮轴与第一步进电机22的输出端键连接,所述雾炮机25的后端设置有第二步进电机55,且第二步进电机55与旋转台23固定连接,所述第二步进电机55通过驱动室26与雾炮机25传动连接,所述电机驱动模组49的输出端与第一步进电机22和第二步进电机55的输入端电性连接。
49.在上述方案中,第一步进电机的输出端通过齿轮啮合结构带动雾炮机水平旋转,从而调节喷淋方向,而第二步进电机则能在驱动室内皮带机构的传动作用下,带动雾炮机上下转动,从而调节喷淋角度,两者协同作用,大大提高的喷淋机构的灵活性。
50.一个优选方案中,所述水箱16的内部安装有潜水泵33,所述雾炮机25内部的前端安装有高压风机28,所述高压风机28的后端安装有风机马达34,所述雾炮机25内部的后端安装有喷淋盘35,所述喷淋盘35的前端面上安装有雾化喷头36,所述雾化喷头36的上端通
过输水管27与潜水泵33的出水口相连通,所述单片机芯片48的输出端通过继电器50与风机马达34和潜水泵33的输入端电性连接。
51.在上述方案中,潜水泵能够将水箱内的水导入雾炮机内的喷淋盘,由喷淋盘前端的雾化喷头喷出,并在高压风机的作用下沿炮口扩散喷洒,达到大面积雾化喷淋的效果。
52.一个优选方案中,所述水箱16的一侧安装有排水阀32,所述水箱16上表面的一侧安装有进水阀20,所述水箱16的前端设置有液位观察窗17,所述液位观察窗17的一侧设置有刻度线18。
53.在上述方案中,水箱前端的液位观察窗可以从外部直观的查看液位量,方便及时补液。
54.一个优选方案中,所述车架2的后端安装有集尘盒44,所述底盘1下表面的后端安装有清扫机构42,所述清扫机构42的上端安装有异步电机43,所述异步电机43的输出端贯穿并延伸至清扫机构42的内部,且安装有抽风叶轮45,所述抽风叶轮45的下端安装有毛刷杆46,所述清扫机构42通过导风管与集尘盒44相连通。
55.在上述方案中,规划路线时采用白色粉末作为划线原料,在最后一次驱动设备沿路线喷淋时,可启动清扫机构,在异步电机的作用下带动抽风叶轮以及毛刷杆旋转,依靠毛刷杆在行驶过程中扫除白色粉尘,并依靠抽风叶轮将其抽送至集尘盒内,避免粉尘污染。
56.一个优选方案中,所述集尘盒44的后端安装有除尘盖5,所述除尘盖5的下端通过铰链7与集尘盒44转动连接,所述除尘盖5的上端通过螺钉6与集尘盒44螺纹连接,所述除尘盖5的外壁上安装有金属防护网8,所述金属防护网8的内壁上安装有无纺布滤网9。
57.在上述方案中,进入集尘盒内的含尘气体能够沿金属防护网排出,而粉尘则被无纺布滤网隔离在集尘盒内,箱盖依靠铰链7翻折开启,由螺钉锁紧固定,方便定期清理。
58.一个优选方案中,所述供电系统10的外壁上安装有散热板11,所述散热板11的外壁上设置有散热百叶12,且散热百叶12设置有若干个,所述供电系统10的上端安装有光伏太阳能板13,所述光伏太阳能板13通过支架14与供电系统10固定连接,所述供电系统10的内部安装有光伏控制器52、蓄电池53和光伏逆变器54,所述光伏太阳能板13的输出端通过光伏控制器52与蓄电池53的输入端电性连接,所述蓄电池53的输出端通过光伏逆变器54与配电柜15的输入端电性连接。
59.在上述方案中,光伏太阳能板能够将太阳能转化为直流电能,并通过光伏控制器存储至蓄电池,当设备需要用电时,光伏逆变器可将蓄电池内的直流电转化为交流电能,并依靠配电柜分配至用电元件使用。
60.一个优选方案中,所述公路施工用路面喷淋养护设备的使用方法,包括以下步骤:
61.步骤一:首先,依靠划线机在施工公路上沿预定的喷洒路线划出由粉状物料构成的白线;
62.步骤二:将喷淋养护设备放置在白线起点,依靠移动终端向单片机芯片48上的无线传输模块51发出信号,使其通过电机驱动模组49控制编码电机41运行,让小车向前行驶;
63.步骤三:行驶过程中,由底盘1前端的两组光敏传感器47对路面实施感应,并通过投射到路面和白线部分反射率的不同,对应接收到的两路光敏电阻信号进行比较,控制两则编码电机41和舵机37运转,从而修正设备的前进方向,使其始终沿白线前进;
64.步骤四:前进时,通过远程控制驱动水箱16内的潜水泵33运行,将水输送至雾炮机
25内,实现对当前路线混凝土路面的大面积喷淋工作,雾炮机25喷淋角度以及方向可通过第一步进电机22和第二步进电机55的传动作用调整,当前的喷淋状况则由水箱16上的摄像头19实时传输至移动终端查看;
65.步骤五:当设备行驶到白线终点时,可根据需求往返操作,对混凝土路面进行多次喷淋,在最后一次喷淋工作时,可驱动底盘1内的清扫机构42,依靠毛刷杆46在行驶过程中扫除白色粉尘,并依靠抽风叶轮45将其抽送至集尘盒44内。
66.尽管本发明的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本发明的领域,对于熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节和这里所示出与描述的图例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1