一种智能控制清洁机器人系统的制作方法
1.本发明涉及清洁机器人技术领域,尤其涉及一种智能控制清洁机器人系统。
背景技术:
2.路面是指用各种筑路材料铺筑在道路路基上直接承受车辆荷载的层状构造物,而质量良好的路面应有足够的强度和良好的稳定性,其表面应达到平整、密实和抗滑的要求。而路面在投入使用后,通常需要环卫人员定期对路面进行清扫,清扫过程中,就需要用到清洁机器人。
3.目前现有的智能控制清洁机器人在实际使用时,存在清理不干净的问题,尤其是在路面顽固污渍较多时,往往清理效果不理想,影响了环卫人员的正常工作,降低了清理效率,需要进行改进。
技术实现要素:
4.本发明的目的是为了解决现有技术中存在的缺点,而提出的一种智能控制清洁机器人系统。
5.为了实现上述目的,本发明采用了如下技术方案:一种智能控制清洁机器人系统,它是由横梁、主垃圾箱、副垃圾箱、传送带本体、传送带电机、轮毂电机、滚刷电机、水箱、边刷电机和边刷本体构成,所述横梁的顶面靠近边缘位置处固定安装有主垃圾箱,所述主垃圾箱的侧面靠近边缘位置处固装有副垃圾箱,所述主垃圾箱的侧面装有传送带电机,所述传送带电机的输出端装有传送带本体,所述横梁的底面设置有轮毂电机,所述横梁的顶面靠近中心位置处固定安装有滚刷电机,所述横梁的顶面靠近滚刷电机的位置处固装有水箱,所述横梁的顶面远离主垃圾箱的位置处设置有边刷电机,所述边刷电机的输出端装有边刷本体。
6.优选的,所述主垃圾箱远离传送带本体的一侧转动连接有踏板,所述踏板的数量为两组。
7.优选的,所述传送带本体的顶面设置有吸尘风机,所述吸尘风机与副垃圾箱之间通过管道连通。
8.优选的,所述主垃圾箱的侧面靠近副垃圾箱的位置处固装有蓄电池,所述蓄电池与传送带电机、轮毂电机、滚刷电机和边刷电机均相连接。
9.优选的,所述横梁的底面开设有吸尘风口,所述吸尘风口与吸尘风机之间通过管道相连通。
10.优选的,所述横梁的底面转动连接有万向轮,所述边刷电机和边刷本体的数量均为四组。
11.与现有技术相比,本发明的优点和积极效果在于,
12.1、本发明通过设置的边刷本体可以有效的清理垃圾,同时在本发明行进的过程中,滚刷电机带动滚刷向后旋转并将本发明内的空气排出,使得本发明内部和外部产生空
气压力差,从而在边刷本体入口处形成吸力,提高了清理效果,利于实际的使用。
13.2、本发明中,四组边刷本体可以对路面的死角进行清扫,增加了清扫覆盖范围,利于实际的使用,同时传送带本体可以快捷且有效的将垃圾传输到主垃圾箱,结构简单,成本低廉,适合大规模推广应用。
附图说明
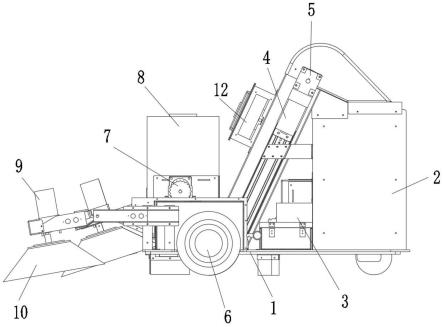
14.图1为本发明提出一种智能控制清洁机器人系统的正视图;
15.图2为本发明提出一种智能控制清洁机器人系统的后视图;
16.图3为本发明提出一种智能控制清洁机器人系统的左视图;
17.图4为本发明提出一种智能控制清洁机器人系统的仰视图。
18.图例说明:
19.1、横梁;2、主垃圾箱;3、副垃圾箱;4、传送带本体;5、传送带电机;6、轮毂电机;7、滚刷电机;8、水箱;9、边刷电机;10、边刷本体;11、踏板;12、吸尘风机;13、蓄电池;14、吸尘风口;15、万向轮。
具体实施方式
20.为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和实施例对本发明做进一步说明。需要说明的是,在不冲突的情况下,本技术的实施例及实施例中的特征可以相互组合。
21.在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用不同于在此描述的其他方式来实施,因此,本发明并不限于下面公开说明书的具体实施例的限制。
22.请参阅图1-4,本发明提供一种技术方案:一种智能控制清洁机器人系统,它是由横梁1、主垃圾箱2、副垃圾箱3、传送带本体4、传送带电机5、轮毂电机6、滚刷电机7、水箱8、边刷电机9和边刷本体10构成,横梁1的顶面靠近边缘位置处固定安装有主垃圾箱2,主垃圾箱2的侧面靠近边缘位置处固装有副垃圾箱3,主垃圾箱2的侧面装有传送带电机5,传送带电机5的输出端装有传送带本体4,横梁1的底面设置有轮毂电机6,横梁1的顶面靠近中心位置处固定安装有滚刷电机7,横梁1的顶面靠近滚刷电机7的位置处固装有水箱8,横梁1的顶面远离主垃圾箱2的位置处设置有边刷电机9,边刷电机9的输出端装有边刷本体10。
23.本实施方案中,两个边刷本体10采用边刷电机9传动,将垃圾铲起后,通过反向转动,来将垃圾传送到传送带本体4上,随后传送带电机5带动传送带本体4运动,再由传送带本体4倒入主垃圾箱2中,同时在本发明行进的过程中,滚刷电机7带动滚刷向后旋转并将本发明内的空气排出,并且由于边刷本体10连续放置四组,并倾斜了一定的角度,本发明行进时可以减缓空气进入机身,使得本发明内部和外部产生空气压力差,从而在边刷本体10入口处形成吸力,从而使得本发明可以不依赖鼓风机的吸力就能实现垃圾的立即清理清扫和吸入,本发明通过设置的边刷本体10可以有效的清理垃圾,同时在本发明行进的过程中,滚刷电机7带动滚刷向后旋转并将本发明内的空气排出,使得本发明内部和外部产生空气压力差,从而在边刷本体10入口处形成吸力,提高了清理效果,利于实际的使用。
24.具体的,主垃圾箱2远离传送带本体4的一侧转动连接有踏板11,踏板11的数量为
两组。
25.在本实施例中:踏板11可以方便环卫人员的站立,使得环卫人员可以方便控制本发明。
26.具体的,传送带本体4的顶面设置有吸尘风机12,吸尘风机12与副垃圾箱3之间通过管道连通。
27.在本实施例中:吸尘风机12可将污渍吸入到副垃圾箱3中。
28.具体的,主垃圾箱2的侧面靠近副垃圾箱3的位置处固装有蓄电池13,蓄电池13与传送带电机5、轮毂电机6、滚刷电机7和边刷电机9均相连接。
29.在本实施例中:蓄电池13可以对本发明进行供电。
30.具体的,横梁1的底面开设有吸尘风口14,吸尘风口14与吸尘风机12之间通过管道相连通。
31.在本实施例中:吸尘风机12可透过吸尘风口14来将地面上的灰尘吸走,并最终排入副垃圾箱3中。
32.具体的,横梁1的底面转动连接有万向轮15,边刷电机9和边刷本体10的数量均为四组。
33.在本实施例中:横梁1可通过万向轮15在路面上移动。
34.工作原理:两个边刷本体10采用边刷电机9传动,将垃圾铲起后,通过反向转动,来将垃圾传送到传送带本体4上,随后传送带电机5带动传送带本体4运动,再由传送带本体4倒入主垃圾箱2中,同时在本发明行进的过程中,滚刷电机7带动滚刷向后旋转并将本发明内的空气排出,并且由于边刷本体10连续放置四组,并倾斜了一定的角度,本发明行进时可以减缓空气进入机身,使得本发明内部和外部产生空气压力差,从而在边刷本体10入口处形成吸力,从而使得本发明可以不依赖鼓风机的吸力就能实现垃圾的立即清理清扫和吸入。
35.以上所述,仅是本发明的较佳实施例而已,并非是对本发明作其它形式的限制,任何熟悉本专业的技术人员可能利用上述揭示的技术内容加以变更或改型为等同变化的等效实施例应用于其它领域,但是凡是未脱离本发明技术方案内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与改型,仍属于本发明技术方案的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1