一种基于倾角传感器的沥青路面车辙监测系统的制作方法
1.本发明涉及道路监测领域,具体涉及一种基于倾角传感器的沥青路面车辙监测系统。
背景技术:
2.车辙是沥青路面在重复交通荷载作用下产生的累计永久变形,是当前沥青路面主要的破坏形式之一。路面车辙发生后对路面服务使用性能会产生很大的破坏和影响,严重影响高速行车安全。如何防治车辙病害,提高公路建设的经济和社会效益,是我国道路从业者需要解决的首要问题,因此,加强展开对车辙问题的研究十分必要。
3.然而,我国目前的车辙检测方式主要有手工方式和检测车定期检测方式,均属于路表车辙检测,不能够得到路面面层内部不同层位的车辙变形。此外,手工方式用直尺作为检测工具,采用人工直接测量的方式,手段落后,与现代公路交通的运营环境极不适应,而检测车定期检测的方式成本过高,一般1年检测1次。上述两种检测方式,均不能够做到实时监测路面,难以及时掌握路面车辙状态,做到及时预警和养护。
4.基于倾角传感器测斜原理,我国许多学者已做了许多研究,应用到各个领域,如公开号为cn202350783u的“基于高精度双轴倾角传感器的煤气柜活塞倾斜监测系统”、公开号为cn106092048a的“一种基于无线倾角传感器的文物稳定性监测系统”、公开号为cn109171742a的“一种基于倾角传感器的牲畜运动量检测系统”、公开号为cn109405747a的“基于平板的滑坡体表面位移监测方法及装置”、公开号为cn110243340a的“一种基于测绘技术和倾角传感器的倾斜沉降监测系统”、公开号为cn110686643a的“一种道路横纵坡自动测量装置及其使用方法”、公开号为cn205670371u的“一种基于倾角传感器的景区边坡实时监测系统”等,上述专利未见传感器特殊封装、以及使用销轴使多传感器可以联合工作等,不能满足路面结构内部应用的要求;此外也未涉及仅由倾角到变形的算法。
技术实现要素:
5.为解决上述问题,本发明提供了一种基于倾角传感器的沥青路面车辙监测系统。
6.为实现上述目的,本发明采取的技术方案为:
7.一种基于倾角传感器的沥青路面车辙监测系统,包括倾角测量单元组、4gdtu模块、云平台和太阳能电源模块;所述倾角测量单元组由若干测量单元经销轴串联形成,用于测量沥青路面面层内部不同水平位置变形产生的角度变化参数;所述测量单元由安装在铝合金节段中的倾角传感器构成,每个倾角传感器均采用前凸后凹的封装结构;所述倾角传感器采用9轴或6轴姿态传感器,能够快速给出传感器模块当前的实时姿态的数字信号;量程为角度
±
180
°
,静态精度不小于0.05
°
;所述4g dtu模块用于将倾角测量单元组采集到的角度变化参数发送到云平台;所述云平台用于基于预设的算法将角度变化参数转化为车辙变形参数输出;所述太阳能电源模块用于为监测系统供电;
8.进一步地,所述测量单元组布设在路肩和相邻行车道某一沥青混凝土层内部,覆
盖沥青路面车辙发生区域的一半,且路肩位置测量值作为参考值,对行车道测量得到的数据进行修正。
9.进一步地,所述预设的算法用于将测量单元倾角转化为测量单元自身节点处相对位移,基于路肩测量值,将测量单元相对位移转化为绝对位移;进而得到测量单元的横纵坐标,通过纵向坐标最大值与最小值之差得到车辙深度。
10.进一步地,采用环氧树脂灌封胶进行封装。
11.进一步地,为保护电缆,在测量单元首尾相连处设置弹簧软管,并对测量单元组使用热塑管进行整体封装。
12.与现有技术相比,本发明的有益效果是:
13.1)在对路面不造成破坏的前提下,路面内部的车辙进行实时监测,及时发现车辙病害。
14.2)可以辅助实现路面病害的诊断,通过不同层位变形数据判断车辙主要发生层位,做到只对严重变形层位进行维修处置,节省成本,而现有一般路表车辙检测技术无法精确确认车辙具体发生在哪一层位。
15.3)设计了一种“前凸后凹”式的特殊封装结构,并在相邻的两封装结构间使用销轴进行固定,使其相对位置保持不变,保持测量的准确性。
16.4)为保护电缆,在测量单元首尾相连处设置弹簧软管,并对测量单元组使用热塑管进行整体封装。
17.5)4g dtu模块可以直接将信号发送到云平台,使用手机或者电脑可以登录云平台直接查看路面车辙深度,不需要到现场检测,十分方便。
18.6)云平台可以设置预警值,当测得的车辙深度达到预警值时可以将预警信息发送到手机上,可以及时发现病害并进行及时养护。
19.7)设计了一种独特的算法,仅需倾角传感器测得的倾角值即可得到位移可以将测得的倾角值转化成车辙深度。
20.8)所设计的算法设置了温度修正,尽可能的减小了温度对所测倾角的影响,保持测量的准确性。
21.9)为适应路面内部埋设,特殊封装结构使用环氧树脂灌封胶进行灌封,环氧树脂灌封胶有硬度高、表面平整,有固定、绝缘、防水、防油、防尘、防盗密、耐腐蚀、耐老化、耐冷热冲击等特性。
22.10)倾角传感器的布设在车辙段和非车辙段都有,非车辙段的倾角传感器既可以起到参考点的作用,又可以对算法中的温度修正提供参考。
附图说明
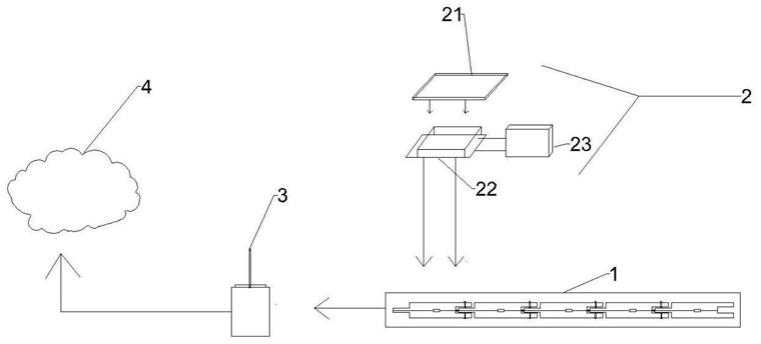
23.图1为路面车辙监测系统的结构示意图;
24.图2为测量单元组示意图;
25.图3为测量单元示意图;
26.图4为倾角测量单元组横向断面示意图;
27.图5为倾角测量单元组纵向横截面示意图。
28.图6为算法原理图。
29.图7为本发明实施例中倾角测量单元的布置图。
30.图8为图7的侧视图。
具体实施方式
31.为了使本发明的目的及优点更加清楚明白,以下结合实施例对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
32.如图1所示,本发明实施例提供了一种沥青路面车辙监测系统,包括倾角测量单元组1、太阳能电源模块2、4g dtu模块3和云平台4,倾角测量单元组1由若干测量单元经销轴串联形成,每个测量单元内布置一个mems倾角传感器11,每个mems倾角传感器11采用灌封胶固定于专门设计的铝合金节段12之中,将测量单元进行柔性串联形成测量单元组,每个单元能够随路面内部变形而转动且其相对距离保持不变;在封装且连接好的单元组外使用热塑管13进行整体封装;如图2所示,铝合金节段内布置一mems倾角传感器11(布置时要保证各倾角传感器11的坐标轴一致);测量单元前端为凸出的结构,后端为凹入的结构,后一测量单元的前端插入前一封装结构的后端,并使用销轴14固定,使其相对距离保持不变;在前一测量单元的后端与后一测量单元的前端之间设置一弹簧软管15,作用为保护电缆16;在各封装结构中通一电缆16使其串联;将布设于路面面层内部的倾角测量单元组并联后与4g dtu模块3连接;4g dtu模块3将倾角传感器11产生的数字信号采集并传输给云平台4,然后通过专门算法将各测量单元测得的倾斜角度转化成各节段的坐标进而得到车辙深度。
33.所述mems倾角传感器11采用9轴姿态传感器,模块集成高精度的陀螺仪、加速度计、地磁场传感器,采用高性能的微处理器和先进的动力学解算与卡尔曼动态滤波算法,能够快速求解出模块当前的实时运动姿态。
34.所述太阳能电源控制器22的正极与负极分别与太阳能电池板21的正极与负极连接,用于为整个系统提供电能,太阳能电源控制器22的蓄电池接入端正极与负极分别与蓄电池23的正极与负极连接,用于为整个系统存储电能,太阳能电源控制器22的供电输出端与倾角测量单元组1连接。
35.下面对本实施例的工作步骤进行说明:
36.1、倾角测量单元组的设置
37.(1)选用环氧树脂灌封胶将mems倾角传感器11固定于专门设计的铝合金节段12之中,形成测量单元,每个倾角测量单元组均包括间隔布置的测量单元、销轴14、电缆16及弹簧软管15。每节测量单元的长120mm、相邻销轴净距100mm、宽40mm,高20mm。对测量单元组使用热塑管13进行整体封装,使其具有良好的防水性以及耐压性的同时具备变形能力。
38.(2)在布置mems倾角传感器11时,将其平放在铝合金节段12的内部,并保证每个传感器的初始坐标系方向一致。mems倾角传感器11的型号可选择深圳维特智能公司的wt901c485模块(精度:静态0.05
°
,动态0.1
°
;输出频率:20hz;量程:加速度
±
16g,角速度
±
2000
°
/s,角度
±
180
°
可获得的数据包括:时间、加速度、角速度、角度、磁场、端口状态。
39.(3)以串联好的n个测量单元为一组,将布设于面层内部的倾角测量单元组并联后与4g dtu模块3连接;通过4g dtu模块3将倾角传感器11产生的数字信号采集并传输给云平台4。
40.(4)在使用前连接好系统电路:将太阳能电源模块2、倾角测量单元组1、4g dtu模块3通过电缆16依次连接。
41.2、太阳能电源模块的设置
42.太阳能电源控制器22的正极与负极分别与太阳能电池板21的正极与负极连接,用于为整个系统提供电能,太阳能电源控制器22的蓄电池接入端正极与负极分别与蓄电池23的正极与负极连接,用于为整个系统存储电能,太阳能电源控制器22的供电输出端正极与负极分别与倾角测量单元组1的正极与负极连接,用于为倾角传感器11提供稳定电压。
43.3、数据获取和运算
44.在本实施例中,可以根据一组串联好的n个测量单元(1号
‑
n号测量单元)监测数据计算出被测位置的纵向变形量、车辙深度以及车辙发生的横向位置,具体算法如下:
45.z1=a*sin(θ1‑
θ0)
46.z2=z1+a*sin(θ2‑
θ0)
47.z3=z2+a*sin(θ3‑
θ0)
48.…
49.z
n
=z
n
‑1+a*sin(θ
n
‑
θ0)
50.z1'=z+z151.z2'=z+z252.z3'=z+z353.…
54.z
n
'=z+z
n
55.rd=max(z')
‑
min(z')
56.x1=a*cos(θ1‑
θ0)
57.x2=x1+a*cos(θ2‑
θ0)
58.x3=x2+a*cos(θ3‑
θ0)
59.…
60.x
n
=x
n
‑1+a*cos(θ
n
‑
θ0)
61.其中,a是相邻销轴的净距。θ0是布设在路肩处的测量单元受温度影响产生的倾角值,θ1,θ2,θ3…
θ
n
是1号
‑
n号测量单元监测的倾角值。z1,z2,z3…
z
n
是1号
‑
n号测量单元的纵向变形量。x1,x2,x3…
x
n
是1号
‑
n号测量单元的横向坐标。z1',z2',z3'
…
z
n
'是1号
‑
n号测量单元的纵向坐标。z是布设测量单元时测量单元的初始纵向坐标。rd是车辙深度。
62.实施例
63.以一个3m宽行车道,0.5m宽路肩,4cm上面层,6cm下面层路面为例;用16个测量单元串联组成一个倾角测量单元组,将两个并联好的倾角测量单元组分别布设在上面层内部与下面层内部;布设方向为与行车方向垂直方向,倾角传感器单元从距行车道12cm的路肩处开始布设;电源模块布设在路肩位置负责给倾角测量单元组供电;当车辆经过被测位置,上面层的倾角测量单元组(除去布设在路肩的1个倾角传感器)共计15个倾角传感器得到15个倾角值0.55
°
0.46
°
0.43
°
0.31
°
0.16
°‑
0.12
°‑
0.24
°‑
0.35
°‑
0.36
°
64.‑
0.41
°‑
0.43
°‑
0.49
°‑
0.35
°‑
0.17
°
0.07
°
,布设在路肩的1个倾角传感器也得到1个倾角值0.05
°
;布设测量单元时测量单元的初始纵向坐标为
‑
0.1cm,计算过程如下:
65.z1=10*sin(0.55
‑
0.05)=0.087cm
66.z2=z1+10*sin(0.46
‑
0.05)=0.159cm
67.z3=z2+10*sin(0.43
‑
0.05)=0.226cm
68.z4=z3+10*sin(0.31
‑
0.05)=0.272cm
69.z5=z4+10*sin(0.16
‑
0.05)=0.291cm
70.z6=z5+10*sin(
‑
0.12
‑
0.05)=0.261cm
71.z7=z6+10*sin(
‑
0.24
‑
0.05)=0.211cm
72.z8=z7+10*sin(
‑
0.35
‑
0.05)=0.142cm
73.z9=z8+10*sin(
‑
0.36
‑
0.05)=0.071cm
74.z
10
=z9+10*sin(
‑
0.41
‑
0.05)=
‑
0.080cm
75.z
11
=z
10
+10*sin(
‑
0.43
‑
0.05)=
‑
0.092cm
76.z
12
=z
11
+10*sin(
‑
0.49
‑
0.05)=
‑
0.187cm
77.z
13
=z
12
+10*sin(
‑
0.35
‑
0.05)=
‑
0.256cm
78.z
14
=z
13
+10*sin(
‑
0.17
‑
0.05)=
‑
0.295cm
79.z
15
=z
14
+10*sin(
‑
0.07
‑
0.05)=
‑
0.315cm
80.z1'=z+z1=
‑
0.013cm
81.z2'=z+z2=0.059cm
82.z3'=z+z3=0.126cm
83.z4'=z+z4=0.172cm
84.z5'=z+z5=0.191cm
85.z6'=z+z6=0.161cm
86.z7'=z+z7=0.111cm
87.z8'=z+z8=0.042cm
88.z9'=z+z9=
‑
0.029cm
89.z
10
'=z+z
10
=
‑
0.180cm
90.z
11
'=z+z
11
=
‑
0.192cm
91.z
12
'=z+z
12
=
‑
0.287cm
92.z
13
'=z+z
13
=
‑
0.356cm
93.z
14
'=z+z
14
=
‑
0.395cm
94.z
15
'=z+z
15
=
‑
0.415cm
95.rd=max(z')
‑
min(z')=0.191
‑
(
‑
0.415)=0.606cm
96.x1=10*cos(0.55
‑
0.05)=10.00cm
97.x2=x1+10*cos(0.46
‑
0.05)=20.00cm
98.x3=x2+10*cos(0.43
‑
0.05)=30.00cm
99.x4=x3+10*cos(0.31
‑
0.05)=40.00cm
100.x5=x4+10*cos(0.16
‑
0.05)=50.00cm
101.x6=x5+10*cos(
‑
0.12
‑
0.05)=60.00cm
102.x7=x6+10*cos(
‑
0.24
‑
0.05)=70.00cm
103.x8=x7+10*cos(
‑
0.35
‑
0.05)=80.00cm
104.x9=x8+10*cos(
‑
0.36
‑
0.05)=90.00cm
105.x
10
=x9+10*cos(
‑
0.41
‑
0.05)=100.00cm
106.x
11
=x
10
+10*cos(
‑
0.43
‑
0.05)=110.00cm
107.x
12
=x
11
+10*cos(
‑
0.49
‑
0.05)=120.00cm
108.x
13
=x
12
+10*cos(
‑
0.35
‑
0.05)=130.00cm
109.x
14
=x
13
+10*cos(
‑
0.17
‑
0.05)=140.00cm
110.x
15
=x
14
+10*cos(
‑
0.07
‑
0.05)=150.00cm
111.rd即是求得的车辙深度,下面层同理。又因为本系统可以实时地、同步地监测上下面层的车辙深度,所以可以根据上下面层的车辙深度判断车辙主要发生层位,做到更有针对性的养护。
112.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1