一种预制路面板机械化快速施工装备及方法与流程
1.本发明涉及预制装配式路面技术领域,具体涉及一种预制路面板机械化快速施工装备及方法。
背景技术:
2.2017年3月国家相关部门印发了相关管理方法,确定了2020年装配式建筑发展的目标为全国装配式建筑占新建建筑的比例达到15%以上,其中重点推进地区达到20%以上;培育50个以上装配式建筑示范城市,200个以上装配式建筑产业基地,500个以上装配式建筑示范工程。
3.在道路技术领域,装配式路面的规模化应用一方面能够推进装配式建筑占新建建筑的比例,另一方面装配式路面作为一种道路建设新工艺,改变了传统水泥混凝土养护模式,解决了混凝土强度增长缓慢与道路完工后快速通车这一主要矛盾。采用工场预制建造模式,提高了生产效率和资源利用率,用水量及二氧化碳排放量大幅降低;同时采用预制装配式技术建设道路及养护破损路面耗费的时间成本也更少。
4.虽然装配式路面在技术上具有明显竞争优势,但现有装配式路面施工方法区别于传统现浇道路方法,需要应用大型吊车,同时铺装施工对场地有一定的要求,大型吊车进行临时施工,施工效率、施工质量及安全性较低,没有形成一套完整的装配式路面施工设备,一体化程度差,这造成装配式路面的建造成本非常高,另一方面也制约了装配式道路技术的发展。
技术实现要素:
5.本发明的目的在于,针对现有技术的不足,提供一种效率高、施工成本低的预制路面板机械化快速施工装备及方法。
6.本发明采用的技术方案为:一种预制路面板机械化快速施工装备,包括运输装置、可移动的龙门吊、吊装装置、拼装装置和控制系统;所述运输装置设于龙门吊的后方,运输装置和龙门吊均可在待铺装预制路面板的天然地基层上行走;所述运输装置设于龙门吊的后方;所述吊装装置安装在龙门吊的上部,可在运输装置与龙门吊前方之间移动;所述拼装装置安装在龙门吊的下部;所述控制系统分别与运输装置、吊装装置和拼装装置相连,控制各装置动作;所述运输装置用于将场外的预制路面板和连接件运输至龙门吊的后方;所述吊装装置用于将运输装置上的预制路面板吊装至龙门吊前方铺设位置;所述拼装装置用于连接相邻两个预制路面板。
7.按上述方案,所述龙门吊包括两个侧部支座和设于两侧部支座顶部的框架主体;龙门吊的两侧底部分别安装有行走机构,所述行走机构包括安装在龙门吊的侧部支座底部前方的主动轮和安装在龙门吊侧部支座底部后方的若干从动轮,主动轮和从动轮通过轮架安装在侧部支座上;所述主动轮为外向轮。
8.按上述方案,所述吊装装置包括横梁和吊具,所述吊具安装在横梁上,且可沿横梁
轴线方向移动;所述横梁横跨框架主体,横梁的两端安装有由发动机驱动的移动件,移动件与导轨相适配,导轨开设于框架主体两侧,移动件可沿导轨的长度方向滑动,带动横梁及吊具在框架主体的前方和后方移动;所述吊具包括伸缩吊装绳和吊钩;所述移动件可为滚轮或滑动块。
9.按上述方案,所述拼装装置包括滑动架,以及分别位于滑动架两侧的抓取机构和安装机构,所述滑动架的两端设有滚轮,滚轮通过滚槽安装在侧部支座上,滚轮可带动抓取机构和安装机构沿侧部支座的长度方向移动;所述抓取机构用于抓取运输装置上的连接件并放置在路面板接缝口处对应位置;所述安装机构用于安装固定连接件,利用连接件将两个预制路面板连接起来。
10.按上述方案,所述安装机构包括可旋转伸缩的机械臂a和用于拧动螺母的电动扳手,所述机械臂a的上端与滑动架相连,机械臂a的下端与电动电动扳手相连;所述机械臂a的下端还增设有施工质量检测头,可在拼装前检测预制路面板是否安放正确;所述抓取机构包括可旋转伸缩的机械臂b和设于机械臂b下端的卡爪,卡爪抓取连接件。
11.按上述方案,预制路面板为方形板体结构,其四边各设至少一个接缝口,接缝口内伸出有与螺杆,螺杆一端预埋于预制路面板内;相邻两个预制路面板接缝口处的螺杆通过连接件相连;所述连接件包括螺母、固定架和保护座体,所述螺母与预制路面板的螺杆适配;所述固定架的底部向上隆起,形成两个与螺杆适配的卡口;当两个预制路面板对正后,接缝口内的预埋螺栓与螺母配合,固定架放置在两个对应接缝口内,且两个接缝口内的螺栓位于两侧卡口内,两个螺母限位于两个卡口之间,且分别与固定架压紧;所述保护座体设于接缝口内,所述固定架、螺杆和螺母均设于保护座体内。
12.按上述方案,在龙门吊的底部四角和顶部四角均分别安装有摄像头,摄像头与控制系统相连;所述运输装置、所述吊装装置及拼装装置内均分别安装有定位导航系统,定位导航系统将各装置的位置信息发送至控制系统。
13.按上述方案,所述控制系统安装在龙门吊平台主体的前方,控制系统配置有人工操作台;所述控制系统内置有与定位导航系统相配置的数字化施工定位导航模块,数字化施工定位导航模块包括北斗导航系统与数字化处理系统,北斗导航系统对施工全过程进行定位监测,数字化处理系统根据施工参数进行计算分析,生成拼装网格;控制系统通过各装置内的定位导航系统获取各装置的位置信息,并控制各装置动作,将预制路面板运动并吊装至对应的拼装网格内,同时数字化处理系统根据预制面板位置生成拼接处理点,控制拼装装置将连接件送至接头处理点安装固定,连接两个相邻预制面板。
14.本发明还提供了一种预制路面板机械化快速施工方法,该方法包括如下步骤:
15.步骤一、提供如上所述快速施工装备,在运输装置内装有预制路面板和连接件,操作人员就位;
16.步骤二、将所述施工装备移动至施工现场,具体地,将龙门吊开至施工现场指定位置,并锁定其行走机构;再将运输装置移动至龙门吊后方指定位置;启动控制系统的数字化施工定位导航模块、各摄像头及各装置的定位导航系统,对施工全过程进行监控;
17.步骤三、控制系统启动吊装装置,将运输装置内的预制路面板吊装至拼装网格内;
18.步骤四、拼装预制面板拼接处理:预制路面板吊装到位后,数字化处理系统联合北斗导航系统立即生成接头处理点;控制系统启动拼装装置移动至接头处理点,拼装机构上
的施工质量检测头检测到预制路面板安放对齐后,抓取机构动作,将连接件的螺母和固定架从运输装置中抓起并安放置接头处理点,安装机构立即旋紧螺母,使其压紧固定架锁死;抓取机构再将连接件的保护座体从运输装置中抓起并安放置在固定架的上方;
19.步骤五、并排依次拼装路面板,待整体路面板强度合格后即可投入使用。
20.按上述方案,步骤三的具体方法为:在数字化施工定位导航模块的控制下,吊装装置的发动机驱动吊装装置移动至运输装置的上方,吊起预制路面板后沿导轨缓慢向前移动,将预制路面板放置在拼装网格内,预制路面板的四角位于铺装点上;吊装过程中操作人员在操作台上通过摄像头观察吊装位置是否正确,若不正确则由人工控制吊装装置进行调整。
21.本发明的有益效果为:本发明所述装置由机械设备进行拼装,将吊装装置、拼接装置和控制系统集成在可移动的龙门吊上,一体化程度高;吊装装置与拼接装置同时工作降低施工强度及施工难度,提高了施工效率,降低了施工成本;采用北斗导航系统,可对预制板进行精准铺筑,施工质量更高;已拼装好的路面可作为运输车和龙门吊的行车道面,减少了周围施工用地,并且拼装好的平整道路更利于施工定位导航系统精准定位;采用可移动机构支撑,同时配备不同预制板施工设备,可适应不同预制板铺装(如普通道路施工、机场道面及广场铺装等各种道路),应用范围更广。
附图说明
22.图1为预制路面板的结构示意图。
23.图2为两个预制路面板的连接示意图。
24.图3为连接件的结构示意图。
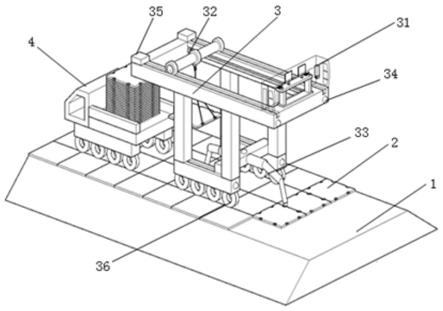
25.图4为本发明一个具体实施例的整体结构示意图。
26.图5为本实施例中龙门吊的结构示意图。
27.图6为本实施例中吊装装置的结构示意图。
28.图7为本实施例中拼接装置的结构示意图。
29.图8为本实施例的施工过程示意图。
30.图中:1、天然地基层,2、预制路面板,2-1、螺杆,3、龙门吊,31、操作台,32、吊装装置,32-1、横梁,32-2、吊具,33、拼装装置,33-1、机械臂a,33-2、卡抓,33-3、电动扳手,33-4、滚轮,33-5、机械臂b,33-6、滑动架,34、摄像头,35、发动机,36、行走机构,37、导轨,38、侧部支座;39、框架主体,310、滚槽,36-1、主动轮,36-2、从动轮,4、运输装置,5、连接件,5-1、螺母,5-2、固定架,5-3、保护座体。
具体实施方式
31.为了更好地理解本发明,下面结合附图和具体实施例对本发明作进一步地描述。
32.预制路面板2的具体如图1所示,预制路面板2为方形板体结构,其四边各设至少一个接缝口,接缝口内伸出有与螺杆2-1,螺杆2-1一端预埋于预制路面板2内;相邻两个预制路面板2接缝口处的螺杆2-1通过连接件5相连(如图2所示)。如图3所示,所述连接件5包括螺母5-1、固定架5-2和保护座体5-3,所述螺母5-1与预制路面板2的螺杆2-1适配;所述固定架5-2的底部向上隆起,形成两个与螺杆2-1适配的卡口;当两个预制路面板2对正后,接缝
口内的预埋螺栓与螺母5-1配合,固定架5-2放置在两个对应接缝口内,且两个接缝口内的螺栓位于两侧卡口内,两个螺母5-1限位于两个卡口之间,且分别与固定架5-2压紧;所述保护座体5-3设于接缝口内,所述固定架5-2、螺杆2-1和螺母5-1均设于保护座体5-3内。本发明所述快速施工装备用于预制路面板2的施工。
33.如图4所示的一种预制路面板机械化快速施工装备,包括运输装置4、可移动的龙门吊3、吊装装置32、拼装装置33和控制系统;所述运输装置4设于龙门吊3的后方,运输装置4和龙门吊3均可在待铺装预制路面板2的天然地基层1上行走;所述运输装置4设于龙门吊3的后方;所述吊装装置32安装在龙门吊3的上部,可在运输装置4与龙门吊3前方之间移动;所述拼装装置33安装在龙门吊3的下部;所述控制系统分别与运输装置4、吊装装置32和拼装装置33相连,控制各装置动作;所述运输装置4用于将场外的预制路面板2和连接件5运输至龙门吊3的后方;所述吊装装置32用于将运输装置4上的预制路面板2吊装至龙门吊3前方铺设位置;所述拼装装置33用于连接相邻两个预制路面板2。
34.本发明中,所述运输装置4为运输车。
35.本发明中,所述龙门吊3结构如图5所示,包括两个侧部支座38和设于两侧部支座38顶部的框架主体39;龙门吊3采用发动机35运行,内燃或电动均可,以电动为主;龙门吊3为现有结构,这里不再赘述。优选地,所述龙门吊3的两侧底部分别安装有行走机构36,具体地,所述行走机构36包括安装在龙门吊3的侧部支座38底部前方的主动轮36-1和安装在龙门吊3侧部支座38底部后方的若干从动轮36-2,主动轮36-1和从动轮36-2通过轮架安装在侧部支座38上;所述主动轮36-1为外向轮。本实施例中,主动轮36-1及从动轮36-2的数量根据龙门吊3的规格及施工现场情况确定。
36.优选地,所述吊装装置32如图6所示,包括横梁32-1和吊具32-2,所述吊具32-2安装在横梁32-1上,且可沿横梁32-1轴线方向移动;所述横梁32-1横跨框架主体39,横梁32-1的两端安装有由发动机35驱动的移动件,移动件与导轨37相适配,导轨37开设于框架主体39两侧,移动件可沿导轨37的长度方向滑动,带动横梁32-1及吊具32-2在框架主体39的前方和后方移动。本实施例中,所述吊具32-2包括伸缩吊装绳和吊钩;所述移动件可为滚轮33-4或滑动块。
37.优选地,所述拼装装置33如图7所示,包括滑动架33-6,以及分别位于滑动架33-6两侧的抓取机构和安装机构,所述滑动架33-6的两端设有滚轮33-4,滚轮33-4通过滚槽310安装在侧部支座38上,滚轮33-4可带动抓取机构和安装机构沿侧部支座38的长度方向移动;所述抓取机构用于抓取运输装置4上的连接件5并放置在路面板接缝口处对应位置;所述安装机构用于安装固定连接件5,利用连接件5将两个预制路面板2连接起来。
38.本实施例中,所述安装机构包括可旋转伸缩的机械臂a33-1和用于拧动螺母5-1的电动扳手33-3,所述机械臂a33-1的上端与滑动架33.6相连,机械臂a33-1的下端与电动电动扳手33-3相连;所述机械臂a33-1的下端还增设有施工质量检测头,可在拼装前检测预制路面板2是否安放正确(具体地,施工质量检测头为内置的微型摄像头,微型摄像头拍摄预制路面板安放位置信息,并将该信息传输至控制系统,联合人工监测判断其是否安放正确)。所述抓取机构包括可旋转伸缩的机械臂b33-5和设于机械臂b33-5下端的卡爪33-2,卡爪33-2抓取连接件5。本发明中,所述电动扳手33-3和抓取机构此为现有技术,这里不再赘述。
39.优选地,在龙门吊3的底部四角和顶部四角(也即平台主体的四角,以及两侧部支座38的前后方向)均分别安装有摄像头34,摄像头34与控制系统相连。
40.优选地,所述运输装置4、所述吊装装置32及拼装装置33内均分别安装有定位导航系统,定位导航系统将各装置的位置信息发送至控制系统。
41.优选地,所述控制系统安装在龙门吊3平台主体的前方,控制系统配置有人工操作台31;所述控制系统内置有与定位导航系统相配置的数字化施工定位导航模块,数字化施工定位导航模块包括北斗导航系统与数字化处理系统,北斗导航系统对施工全过程进行定位监测,数字化处理系统根据施工参数(如道路尺寸、预制路面板2结构尺寸及地形资料)进行计算分析,生成拼装网格(拼装网格的四角为铺装点);控制系统通过各装置内的定位导航系统获取各装置的位置信息,并控制各装置动作,将预制路面板2移动并吊装至对应的拼装网格内(预制面板的四角位于铺装点上),同时数字化处理系统根据预制面板位置生成拼接处理点,控制拼装装置33将连接件5送至接头处理点安装固定,实现两个相邻预制面板的拼接。
42.如图8所示的一种预制路面板机械化快速施工方法,该方法包括如下步骤:
43.步骤一、提供如上所述施工装备,在运输装置4内装有预制路面板2和连接件5,操作人员就位;
44.步骤二、将所述施工装备移动至施工现场,具体地,将龙门吊3开至施工现场指定位置,并锁定其行走机构36;再将运输装置4移动至龙门吊3后方指定位置;启动控制系统的数字化施工定位导航模块、各摄像头34及各装置的定位导航系统,对施工全过程进行监控。
45.步骤三、控制系统启动吊装装置32,将运输装置4内的预制路面板2吊装至拼装网格内。
46.在数字化施工定位导航模块的控制下,吊装装置32的发动机35驱动吊装装置32移动至运输装置4的上方,吊起预制路面板2后沿导轨37缓慢向前移动,将预制路面板2放置在拼装网格内,预制路面板2的四角位于铺装点上。吊装过程中操作人员在操作台31上通过摄像头34观察吊装位置是否正确,若不正确则由人工控制吊装装置32进行调整。
47.步骤四、拼装预制面板拼接处理。预制路面板2吊装到位后,数字化处理系统联合北斗导航系统立即生成接头处理点;控制系统启动拼装装置33移动至接头处理点,拼装机构上的施工质量检测头检测到预制路面板2安放对齐后,抓取机构动作,将连接件5的螺母5-1和固定架5-2从运输装置4中抓起并安放置接头处理点,安装机构立即旋紧螺母5-1,使其压紧固定架5-2锁死;抓取机构再将连接件5的保护座体5-3从运输装置4中抓起并安放置在固定架5-2的上方。
48.拼装过程中,操作人员在操作台31上通过摄像头34观察拼装是否正确,若不正确,则由人工调整拼装装置33对拼缝进行处理。
49.步骤五、并排依次拼装路面板,待整体路面板强度合格后即可投入使用。
50.部分预制路面板2拼装完成后可作为正常路面使用,将运输装置4和龙门吊3开上已铺好的的道路,重复步骤四及步骤五,继续进行预制路面板2的吊装及拼接,吊装装置32与预制构件拼装顺着已铺好的道路向前推进施工,形成流水施工线,直至铺装完成。
51.以上所述,仅为本发明较佳的具体实施方式,但本发明保护的范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内所做的任何修改,等同替换和
改进等,均应包含在发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1