一种便携式通用型安全锥摆放装置的制作方法
1.本实用新型涉及一种便携式通用型安全锥摆放装置,属于安全锥摆放技术领域。
背景技术:
2.安全锥也称交通锥、反光锥、路锥,是摆放在道路上用于疏导道路交通的一种交通标识件,传统对安全锥的摆放主要是人工进行,对于需要对安全锥进行长距离多数量的整齐快速摆放和回收,采用人工作业摆放劳动强度大可操作性低;
3.在中国专利公开号为cn211285374u的一种高速公路半自动化交通锥桶收摆车辆,采用的技术为:锥桶放置于挡板之上,夹板在小型液压缸的作用下绕销转动,将放置于挡板之上的锥桶夹紧固定,旋转机械臂在液压马达的带动下向下旋转固定角度后停止旋转,锥桶接触地面,夹板在小型液压缸的作用下旋转,停止夹紧锥桶并与其脱离接触,随着车辆平台的行进,锥桶在导向框架的作用下平稳靠近拨杆,拨杆与侧倒的锥桶的外边缘接触,拨正为垂直状态;虽然,能解决不使用人工对安全锥的摆放,达到了对安全锥长距离多数量的摆放和回收,但是,每次需要保持握住安全锥被夹板夹紧固定后才能放手,这样才能保证在下放时不掉落,降低了安全锥的摆放效率,同时,每次安全锥在夹板与挡板之间进行靠近定位时,夹板的末端会顶撞安全锥导致损坏;并且,拨杆在对锥桶进行摆正时,由于拨杆的弧段处于末端,当需要在高速路上高速快速进行摆放时,拨杆的弧段很难对锥桶在竖立后进行状态稳定。
4.在中国专利公开号为cn111501612a的一种交通路锥自动收放车及收放方法,采用的技术为:路锥锥托的外形成圆锥状与路锥内表面配合;当路锥脱离路锥锥托后,路锥锥顶朝右,路锥后底座超左,此时车轮继续超前行驶,压杆会压到路锥的两侧后底座上,压杆的弧度设置会使得当车体继续前进时,使得路锥竖立摆正;虽然,通过路锥锥托与路锥内表面配合解决了夹板的末端会顶撞安全锥导致损坏的问题,但是,在压杆压到路锥的两侧后底座上使得路锥竖立摆正时,由于压杆位于竖连杆的末端,当需要在高速路上高速快速进行摆放时,依旧存在很难对锥桶在竖立后进行状态稳定。
技术实现要素:
5.为解决上述技术问题,本实用新型提供了一种便携式通用型安全锥摆放装置。
6.本实用新型通过以下技术方案得以实现。
7.本实用新型提供的一种便携式通用型安全锥摆放装置,包括:
8.将安全锥旋转倒置到路面和从路面对倒置的安全锥收起的摆收机构,摆收机构包括能旋转并能与安全锥内部锥面进行配合的锥头轴;
9.将倒置在路面的安全锥竖正或将竖正在路面的安全锥倒置的校正机构,校正机构能在快速对安全锥竖正后进行状态稳定。
10.由于校正机构能在快速对安全锥竖正后进行状态稳定,解决目前很难在高速上快速对锥桶在竖立后进行状态稳定的问题,保证了需要在高速路上高速快速进行摆放。
11.所述摆收机构还包括与锥头轴底部进行可调角度固定的摆臂a,与摆臂a可控伸缩固定的摆臂b,与摆臂b可调节角度配合带动摆臂b能进行双向旋转的旋转电机,旋转电机旋转时经摆臂b、摆臂a使得锥头轴旋转;
12.当是逆时针旋转时,锥头轴从处于与地面待接触的状态与安全锥配合后,旋转电机旋转时经摆臂b、摆臂a使得锥头轴旋转,安全锥从路面倒置状态倒置到竖立,而后将安全锥从锥头轴取下,完成安全锥的收起;
13.当是顺时针旋转时,锥头轴从与安全锥配合的竖立状态旋转,使得安全锥与地面接触,使安全锥与路面接触摩擦脱离后为倒置状态,而后校正机构对安全锥进行竖正并进行状态稳定。
14.所述锥头轴底部包括两块能可控固定相互滑动的滑体构成,实现锥头轴本身的滑动伸缩。
15.所述锥头轴和摆臂a均设多个对应的插销通孔a,插销通孔a内插入插销,当需要锥头轴和摆臂a进行角度调整时,从插销通孔a内取出插销,调整好角度后再插入,实现可调角度固定。
16.所述摆臂b上设有滑槽,摆臂a卡在滑槽内通过过盈配合或螺栓位置固定,实现可控伸缩固定,用于调节摆臂a在摆臂b内的长度。
17.所述旋转电机末端为齿轮凸起,所述摆臂b设有齿轮槽,当需要摆臂b在旋转电机上进行可调节角度配合时,调整摆臂b的齿轮槽与旋转电机齿轮凸起配合位置进行调整。
18.所述摆收机构还包括对旋转电机提供支撑的架体和对旋转电机进行保护的壳体,架体上固定安装有控制柜。
19.所述校正机构包括设有圆弧凹口的校正板,圆弧凹口与路面一同将安全锥的底部压起竖立;
20.固定在校正板两侧的两根间隔的立杆;
21.设有通孔与供立杆穿入的校正架,校正架上有限位插销a卡在立杆的限位通孔和校正架的限位通孔之间进行限位;
22.与校正架经转轴可转动铰接的调节板,调节板两侧上设有滑动通孔,两个扶倒杆分别安装在两侧的滑动通孔内,扶倒杆远离调节板的末端向外呈圆弧扩张,扶倒杆和调节板的滑动通孔经限位插销b进行位置限位,调整限位插销b,实现扶倒杆在调节板上长度的调整;
23.一端与调节板贯穿的拉杆经两个螺母旋合夹紧在调节板上,拉杆另一端与固定在校正架上的铰接座经转轴铰接,调节拉杆与调节板的距离实现对扶倒杆倾斜角度的调整。
24.所述控制柜内还安装有硬件结构,硬件结构包括:机器人主控系统、电机驱动模块、惯性导航传感器模块、指示灯模块以及电源模块,机器人主控系统通过串口采集惯性导航传感器模块发送过来的位置信息,经过算法处理在显示屏上显示车辆行进间的信息,到达需要放置的位置指示灯模块点亮指示灯提醒放置安全锥。
25.本实用新型的有益效果在于:将摆收机构的架体和校正机构的校正架固定在车辆上,摆收机构位于校正机构的前方,使得车辆向左运动,当在高速路上高速快速对安全锥进行摆放时,安全锥先套在锥头轴上配合,旋转电机旋转带动安全锥倒放在道路路面上,而后校正板的圆弧凹口与路面一同将安全锥的底部压起竖立,在压起时,安全锥在两个扶倒杆
内进行竖立被扶正稳定,而后从两个扶倒杆向外呈圆弧扩张的口远离,实现了校正机构能在快速对安全锥竖正后进行状态稳定。
附图说明
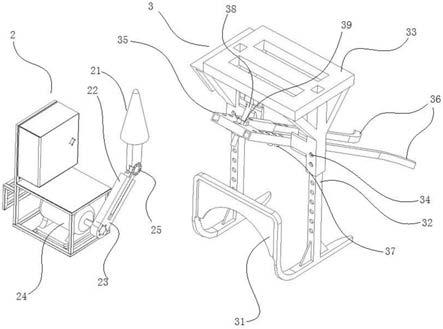
26.图1是本实用新型的结构示意图;
27.图2是图1的后视图;
28.图3是本实用新型的硬件结构示意图;
29.图4是本实用新型的硬件结构工作流程图。
30.图中:2-摆收机构;21-锥头轴;22-摆臂a;23-摆臂b;24-旋转电机;25-插销通孔a;3-校正机构;31-校正板;32-立杆;33-校正架;34-限位插销a;35-调节板;36-扶倒杆;37-限位插销b;38-拉杆;39-螺母。
具体实施方式
31.下面进一步描述本实用新型的技术方案,但要求保护的范围并不局限于所述。
32.如图1至图2所示。
33.本实用新型的一种便携式通用型安全锥摆放装置,包括:
34.将安全锥旋转倒置到路面和从路面对倒置的安全锥收起的摆收机构2,摆收机构2包括能旋转并能与安全锥内部锥面进行配合的锥头轴21;
35.将倒置在路面的安全锥竖正或将竖正在路面的安全锥倒置的校正机构3,校正机构3能在快速对安全锥竖正后进行状态稳定。
36.以图1为参照,将摆收机构2和校正机构3固定在车辆上,使得车辆以图1为参照向左运动,由于校正机构3能在快速对安全锥竖正后进行状态稳定,解决目前很难在高速上快速对锥桶在竖立后进行状态稳定的问题,保证了需要在高速路上高速快速进行摆放。
37.所述摆收机构2还包括与锥头轴21底部进行可调角度固定的摆臂a22,与摆臂a22可控伸缩固定的摆臂b23,与摆臂b23可调节角度配合带动摆臂b23能进行双向旋转的旋转电机24,旋转电机24旋转时经摆臂b23、摆臂a22使得锥头轴21旋转;
38.当是参照图1逆时针旋转时,锥头轴21从处于与地面待接触的状态与安全锥配合后,旋转电机24旋转时经摆臂b23、摆臂a22使得锥头轴21旋转,安全锥从路面倒置状态倒置到竖立,而后将安全锥从锥头轴21取下,完成安全锥的收起;
39.当是参照图1顺时针旋转时,锥头轴21从与安全锥配合的竖立状态旋转,使得安全锥与地面接触,使安全锥与路面接触摩擦脱离后为倒置状态,而后校正机构3对安全锥进行竖正并进行状态稳定。
40.所述锥头轴21底部包括两块能可控固定相互滑动的滑体构成,实现锥头轴21本身的滑动伸缩。
41.所述锥头轴21和摆臂a22均设多个对应的插销通孔a25,插销通孔a25内插入插销,当需要锥头轴21和摆臂a22进行角度调整时,从插销通孔a25内取出插销,调整好角度后再插入,实现可调角度固定。
42.所述摆臂b23上设有滑槽,摆臂a22卡在滑槽内通过过盈配合或螺栓位置固定,实现可控伸缩固定,用于调节摆臂a22在摆臂b23内的长度。
43.所述旋转电机24末端为齿轮凸起,所述摆臂b23设有齿轮槽,当需要摆臂b23在旋转电机24上进行可调节角度配合时,调整摆臂b23的齿轮槽与旋转电机24齿轮凸起配合位置进行调整。
44.所述摆收机构2还包括对旋转电机24提供支撑的架体和对旋转电机24进行保护的壳体,架体上固定安装有控制柜。
45.所述校正机构3包括设有圆弧凹口的校正板31,圆弧凹口与路面一同将安全锥的底部压起竖立;
46.固定在校正板31两侧的两根间隔的立杆32;
47.设有通孔与供立杆32穿入的校正架33,校正架33上有限位插销a34卡在立杆32的限位通孔和校正架33的限位通孔之间进行限位;
48.与校正架33经转轴可转动铰接的调节板35,调节板35两侧上设有滑动通孔,两个扶倒杆36分别安装在两侧的滑动通孔内,扶倒杆36远离调节板35的末端向外呈圆弧扩张,扶倒杆36和调节板35的滑动通孔经限位插销b37进行位置限位,调整限位插销b37,实现扶倒杆36在调节板35上长度的调整;
49.一端与调节板35贯穿的拉杆38经两个螺母39旋合夹紧在调节板35上,拉杆38另一端与固定在校正架33上的铰接座经转轴铰接,调节拉杆38与调节板35的距离实现对扶倒杆36倾斜角度的调整。
50.以图1为参照,将摆收机构2的架体和校正机构3的校正架33固定在车辆上,摆收机构2位于校正机构3的前方,使得车辆以图1为参照向左运动,当在高速路上高速快速对安全锥进行摆放时,安全锥先套在锥头轴21上配合,旋转电机24旋转带动安全锥倒放在道路路面上,而后校正板31的圆弧凹口与路面一同将安全锥的底部压起竖立,在压起时,安全锥在两个扶倒杆36内进行竖立被扶正稳定,而后从两个扶倒杆36向外呈圆弧扩张的口远离,实现了校正机构3能在快速对安全锥竖正后进行状态稳定。
51.安全锥需要收起时,使得校正板31通过立杆32在校正架33向上收起,固定在车辆上的摆收机构2和校正机构3参照图1向右运动,两个扶倒杆36将安全锥推倒与锥头轴21配合,旋转电机24旋转带动安全锥竖起收回。
52.当需要,以图1为参照,使得车辆以图1为参照向右运动对安全锥竖正摆放时,将校正机构3的固定在摆收机构2的左侧,摆臂b23在旋转电机24调整方向,校正板31、调节板35、扶倒杆36调整方向即可。
53.所述控制柜内还安装有硬件结构,硬件结构包括:机器人主控系统、电机驱动模块、惯性导航传感器模块、指示灯模块以及电源模块等,机器人主控系统通过串口采集惯性导航传感器模块发送过来的位置信息,经过算法处理在显示屏上显示车辆行进间的信息,到达需要放置的位置指示灯模块点亮指示灯提醒放置安全锥,如图3所示。
54.机器上电以后,程序进入初始化,然后串口接收传感器发送的数据信息,处理器经过运算,判断是否到达放置地点,如果到达放置地点则点亮指示灯,摆放好安全锥以后继续判断是否摆放完成,如果摆放完成则结束任务,并点亮停止指示灯,如图4所示。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1