一种基于区块链的智能入侵防御检测系统的制作方法
1.本发明属于安全防御系统领域,具体的说是一种基于区块链的智能入侵防御检测系统。
背景技术:
2.现有的入侵防御系统在各类厂区、小区、学校等处的大门位置安装广泛,利用升降柱对道路进行封锁,减少车辆对其造成的冲击。
3.公开号为cn113395694a的一项中国专利公开了基于5g及局域基站的智慧安全防御系统及防御方法,包括网络管理模块、加密模块、检测模块、监控模块、系统管理模块、过滤防火墙、远程控制模块以及紧急防御模块。
4.现有技术中,升降柱在工作过程中,和地面之间存在有空隙,附着在升降柱侧壁上的杂质颗粒会随着升降柱进行上下移动,在杂质颗粒的移动过程中,伴随着滚动会导致形状的改变,增加升降柱和地面之间的摩擦力,使得升降柱移动速度降低,造成升降不及时,导致影响车辆和行人的出行安全。
5.为此,本发明提供一种基于区块链的智能入侵防御检测系统。
技术实现要素:
6.为了弥补现有技术的不足,解决背景技术中所提出的至少一个技术问题。
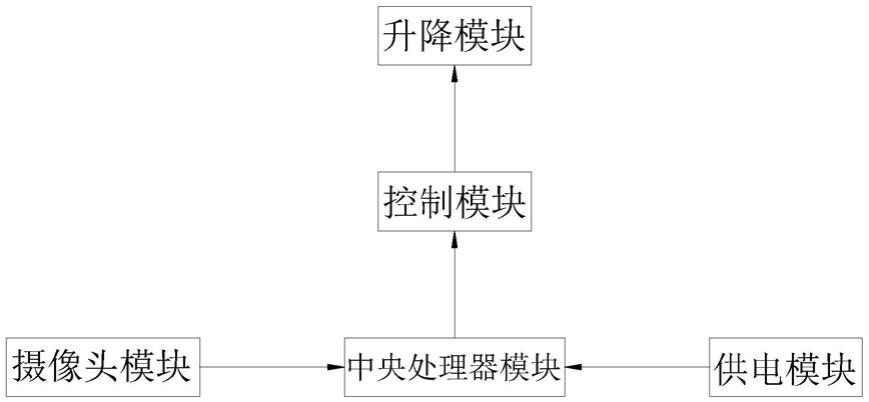
7.本发明解决其技术问题所采用的技术方案是:本发明所述的一种基于区块链的智能入侵防御检测系统,包括中央处理器模块、供电模块、摄像头模块、控制模块、升降模块;所述中央处理器模块和摄像头模块之间通过信号连接;所述中央处理器模块和控制模块之间通过信号连接;所述中央处理器模块和升降模块之间通过信号连接;
8.所述中央处理器模块和供电模块之间通过电线连接;所述供电模块为中央处理器模块进行供电。
9.优选的,所述升降模块包括限位柱;所述限位柱滑动连接在收纳管顶端;所述收纳管内部固接有伸缩杆;所述限位柱底端固接在伸缩杆输出端上;所述限位柱顶端转动连接有多组一号转轴;所述收纳管和一号转轴之间通过扭簧连接;所述一号转轴侧壁固接有刮板;所述刮板和限位柱侧壁相接触;工作时,利用刮板和限位柱侧壁上的接触,可以使刮板对限位柱侧壁上附着的杂质颗粒进行刮除,减少杂质颗粒在限位柱侧壁上的附着,从而减少杂质对限位柱升降造成的影响,使限位柱在移动过程中出现卡顿,影响正常使用。
10.优选的,所述限位柱底端开设有多组一号滑槽;所述一号滑槽内部转动连接有一号滚轮;所述一号滚轮和一号滑槽之间通过扭簧连接;所述收纳管内部底端连接有连接绳;所述连接绳顶部缠绕在一号滚轮上;所述一号滚轮侧壁铰接有一对撞击杆;所述撞击杆和一号滚轮之间通过扭簧连接;所述一号滑槽侧壁设有撞击块;工作时,利用撞击杆对撞击块产生的撞击效果,可以使震动效果在限位柱上进行传递,对限位柱外部附着的灰尘杂质等物体进行松动,方便刮板对其进行铲除,减少灰尘杂质的附着,增加限位柱在运行中的稳定
性。
11.优选的,所述一号滚轮侧壁开设有一对二号滑槽;所述二号滑槽内部固接有一号弹簧;所述一号弹簧和撞击杆靠近一号滚轮的端部相连接;工作时,利用一号弹簧对撞击杆的支撑,可以使撞击杆快速回弹,同时在撞击使增加撞击力度产生更大的震动效果,针对限位柱外部侧壁上附着的灰尘杂质进行松动。
12.优选的,所述限位柱外部侧壁开设有多组三号滑槽;所述三号滑槽内部滑动连接有滑块;所述滑块和三号滑槽之间通过多组二号弹簧进行连接;所述一号滑槽侧壁开设有四号滑槽;所述四号滑槽和三号滑槽相连通;工作时,利用撞击块对滑块侧壁的撞击,可以使滑块进行移动震动,对侧壁上附着的灰尘杂质进行松动,同时刮板在扭簧作用下可以紧贴在滑块侧壁上,增加在震动时对灰尘杂质的清理效果,同时二号弹簧的弹性可对受到的撞击进行部分缓冲,减少受到的伤害。
13.优选的,所述四号滑槽内部侧壁固接有多组撞击球;所述撞击块侧壁固接有固定杆;所述固定杆呈人字形,且人字形底部固接有一对圆珠;所述固定杆滑动连接在四号滑槽内部;所述撞击块和四号滑槽之间通过三号弹簧进行连接;工作时,利用固定杆和撞击球之间的接触,两者在移动中不断产生碰撞,产生一定的震动效果,辅助滑块和限位柱对表面上附着的灰尘杂质进行松动,通过刮板进行清理。
14.优选的,所述刮板侧壁铰接有引导板;所述引导板和刮板之间通过扭簧连接;所述刮板侧壁开设有限位槽;工作时,利用引导板向外展开的弧度,可以使灰尘杂质等颗粒物向外排出,减少在收纳管顶端的堆积,同时减少从限位柱和收纳管缝隙处进入的可能,增加限位柱在运行过程中的稳定性。
15.优选的,所述引导板内部固接有一号磁铁;所述限位柱顶端固接有二号磁铁;所述一号磁铁和二号磁铁磁力相吸;工作时,利用引导板和限位槽之间的磁力相吸,可以使引导板收纳进入限位槽中,减少对车辆行人的刮伤。
16.优选的,所述刮板侧壁铰接有支撑杆;所述支撑杆为分段式设置;一对所述支撑杆之间通过二号转轴进行连接;所述支撑杆和二号转轴之间安装有扭簧;所述支撑杆另一端铰接在引导板侧壁;工作时,利用支撑杆和二号转轴之间的配合对引导板进行支撑缓冲,减少在刮除时重物直接对引导板造成的冲击,造成引导板的损坏,同时利用弹性使重物在撞击后向外排出。
17.优选的,所述支撑杆侧壁固接有四号弹簧;所述四号弹簧另一端固接在限位槽内部侧壁;工作时,利用四号弹簧的弹性可以对进一步对支撑杆进行支撑,面对重物的冲击时可以进一步进行缓冲,增加引导板在工作时的稳定性。
18.本发明的有益效果如下:
19.1.本发明所述的一种基于区块链的智能入侵防御检测系统,通过利用刮板和限位柱侧壁上的接触,可以使刮板对限位柱侧壁上附着的杂质颗粒进行刮除,减少杂质颗粒在限位柱侧壁上的附着,从而减少杂质对限位柱升降造成的影响,使限位柱在移动过程中出现卡顿,影响正常使用。
20.2.本发明所述的一种基于区块链的智能入侵防御检测系统,通过利用撞击杆对撞击块产生的撞击效果,可以使震动效果在限位柱上进行传递,对限位柱外部附着的灰尘杂质等物体进行松动,方便刮板对其进行铲除,减少灰尘杂质的附着,增加限位柱在运行中的
稳定性。
附图说明
21.下面结合附图对本发明作进一步说明。
22.图1是本发明的流程图;
23.图2是本发明的立体图;
24.图3是本发明的主视图;
25.图4是图3中a处放大图;
26.图5是本发明的限位柱的局部剖视图;
27.图6是图5中b处放大图;
28.图7是图3中c处局部放大图;
29.图中:1、限位柱;11、收纳管;12、伸缩杆;13、一号转轴;14、刮板; 2、一号滑槽;21、一号滚轮;22、连接绳;23、撞击杆;24、撞击块;3、二号滑槽;31、一号弹簧;4、三号滑槽;41、滑块;42、二号弹簧;5、四号滑槽;51、撞击球;52、固定杆;53、三号弹簧;6、引导板;61、限位槽; 7、一号磁铁;71、二号磁铁;8、支撑杆;81、二号转轴;9、四号弹簧。
具体实施方式
30.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
31.实施例一
32.如图1所示,本发明实施例所述的一种基于区块链的智能入侵防御检测系统,包括中央处理器模块、供电模块、摄像头模块、控制模块、升降模块;所述中央处理器模块和摄像头模块之间通过信号连接;所述中央处理器模块和控制模块之间通过信号连接;所述中央处理器模块和升降模块之间通过信号连接;
33.所述中央处理器模块和供电模块之间通过电线连接;所述供电模块为中央处理器模块进行供电。
34.如图2至图3所示,所述升降模块包括限位柱1;所述限位柱1滑动连接在收纳管11顶端;所述收纳管11内部固接有伸缩杆12;所述限位柱1底端固接在伸缩杆12输出端上;所述限位柱1顶端转动连接有多组一号转轴13;所述收纳管11和一号转轴13之间通过扭簧连接;所述一号转轴13侧壁固接有刮板14;所述刮板14和限位柱1侧壁相接触;工作时,由工作人员将限位柱1放置在所需位置上,在讲收纳管11埋入地中,在通过摄像头模块对现场情况进行观测,通过控制模块对收纳管11内部伸缩杆12进行控制,带动限位柱1进行升降,在限位柱1的升降过程中,可以使刮板14在一号转轴13 扭簧作用下贴合在限位柱1侧壁上,利用刮板14和限位柱1侧壁上的接触,可以使刮板14对限位柱1侧壁上附着的杂质颗粒进行刮除,减少杂质颗粒在限位柱1侧壁上的附着,从而减少杂质对限位柱1升降造成的影响,使限位柱1在移动过程中出现卡顿,影响正常使用。
35.如图2至图5所示,所述限位柱1底端开设有多组一号滑槽2;所述一号滑槽2内部转动连接有一号滚轮21;所述一号滚轮21和一号滑槽2之间通过扭簧连接;所述收纳管11内部底端连接有连接绳22;所述连接绳22顶部缠绕在一号滚轮21上;所述一号滚轮21侧壁铰接
有一对撞击杆23;所述撞击杆23和一号滚轮21之间通过扭簧连接;所述一号滑槽2侧壁设有撞击块24;工作时,在限位柱1通过伸缩杆12进行上下移动时,利用一号滑槽2和一号滚轮21之间的扭簧连接可以对连接绳22进行缠绕和脱离,使一号滚轮21进行旋转,在一号滚轮21的旋转过程中,侧壁上安装的撞击杆23会对一号滑槽2侧壁上安装的撞击块24进行撞击,利用撞击杆23对撞击块24产生的撞击效果,可以使震动效果在限位柱1上进行传递,对限位柱1外部附着的灰尘杂质等物体进行松动,方便刮板14对其进行铲除,减少灰尘杂质的附着,增加限位柱1在运行中的稳定性。
36.如图4所示,所述一号滚轮21侧壁开设有一对二号滑槽3;所述二号滑槽3内部固接有一号弹簧31;所述一号弹簧31和撞击杆23靠近一号滚轮21 的端部相连接;工作时,在撞击杆23对撞击块24进行撞击时,利用一号弹簧31的硬度对撞击杆23进行支撑,增加撞击力度,利用一号弹簧31对撞击杆23的支撑,可以使撞击杆23快速回弹,同时在撞击使增加撞击力度产生更大的震动效果,针对限位柱1外部侧壁上附着的灰尘杂质进行松动。
37.如图5所示,所述限位柱1外部侧壁开设有多组三号滑槽4;所述三号滑槽4内部滑动连接有滑块41;所述滑块41和三号滑槽4之间通过多组二号弹簧42进行连接;所述一号滑槽2侧壁开设有四号滑槽5;所述四号滑槽5和三号滑槽4相连通;工作时,在部分撞击块24受到撞击杆23撞击时,会迫使撞击块24进行移动,利用四号滑槽5对滑块41侧壁进行撞击,使三号滑槽4在滑块41内部通过二号弹簧42的弹性进行移动,利用撞击块24对滑块 41侧壁的撞击,可以使滑块41进行移动震动,对侧壁上附着的灰尘杂质进行松动,同时刮板14在扭簧作用下可以紧贴在滑块41侧壁上,增加在震动时对灰尘杂质的清理效果,同时二号弹簧42的弹性可对受到的撞击进行部分缓冲,减少受到的伤害。
38.如图6所示,所述四号滑槽5内部侧壁固接有多组撞击球51;所述撞击块24侧壁固接有固定杆52;所述固定杆52呈人字形,且人字形底部固接有一对圆珠;所述固定杆52滑动连接在四号滑槽5内部;所述撞击块24和四号滑槽5之间通过三号弹簧53进行连接;工作时,在撞击块24的移动过程中,其侧壁上安装的固定杆52会和撞击球51进行撞击,产生持续的震动效果,同时三号弹簧53的弹性可以辅助撞击块24进行复位,带动撞击块24进行移动,利用固定杆52和撞击球51之间的接触,两者在移动中不断产生碰撞,产生一定的震动效果,辅助滑块41和限位柱1对表面上附着的灰尘杂质进行松动,通过刮板14进行清理。
39.如图7所示,所述刮板14侧壁铰接有引导板6;所述引导板6和刮板14 之间通过扭簧连接;所述刮板14侧壁开设有限位槽61;工作时,在刮板14 对限位柱1侧壁进行刮除处理时,其引导板6在扭簧作用下向外展开,引导灰尘杂质等颗粒向外排出,利用引导板6向外展开的弧度,可以使灰尘杂质等颗粒物向外排出,减少在收纳管11顶端的堆积,同时减少从限位柱1和收纳管11缝隙处进入的可能,增加限位柱1在运行过程中的稳定性。
40.如图3至7所示,所述引导板6内部固接有一号磁铁7;所述限位柱1顶端固接有二号磁铁71;所述一号磁铁7和二号磁铁71磁力相吸;工作时,在限位柱1完全收纳进入收纳管11内部时,刮板14在扭簧作用下贴合在限位柱1顶端,引导板6在一号磁铁7和二号磁铁71磁力相吸下收纳在限位槽61 内部,利用引导板6和限位槽61之间的磁力相吸,可以使引导板6收纳进入限位槽61中,减少对车辆行人的刮伤。
41.如图7所示,所述刮板14侧壁铰接有支撑杆8;所述支撑杆8为分段式设置;一对所述支撑杆8之间通过二号转轴81进行连接;所述支撑杆8和二号转轴81之间安装有扭簧;所
述支撑杆8另一端铰接在引导板6侧壁;工作时,在引导板6向外展开后,一对支撑杆8利用和二号转轴81之间的扭簧连接引导板6进行支撑,对重物的冲击进行缓冲,利用支撑杆8和二号转轴81 之间的配合对引导板6进行支撑缓冲,减少在刮除时重物直接对引导板6造成的冲击,造成引导板6的损坏,同时利用弹性使重物在撞击后向外排出。
42.如图7所示,所述支撑杆8侧壁固接有四号弹簧9;所述四号弹簧9另一端固接在限位槽61内部侧壁;工作时,在支撑杆8的移动过程中,四号弹簧 9可以辅助支撑杆8进行移动,利用四号弹簧9的弹性可以对进一步对支撑杆 8进行支撑,面对重物的冲击时可以进一步进行缓冲,增加引导板6在工作时的稳定性。
43.工作时,工作时,由工作人员将限位柱1放置在所需位置上,在讲收纳管11埋入地中,在通过摄像头模块对现场情况进行观测,通过控制模块对收纳管11内部伸缩杆12进行控制,带动限位柱1进行升降,在限位柱1的升降过程中,可以使刮板14在一号转轴13扭簧作用下贴合在限位柱1侧壁上,在限位柱1通过伸缩杆12进行上下移动时,利用一号滑槽2和一号滚轮21 之间的扭簧连接可以对连接绳22进行缠绕和脱离,使一号滚轮21进行旋转,在一号滚轮21的旋转过程中,侧壁上安装的撞击杆23会对一号滑槽2侧壁上安装的撞击块24进行撞击,在撞击杆23对撞击块24进行撞击时,利用一号弹簧31的硬度对撞击杆23进行支撑,增加撞击力度,在部分撞击块24受到撞击杆23撞击时,会迫使撞击块24进行移动,利用四号滑槽5对滑块41 侧壁进行撞击,使三号滑槽4在滑块41内部通过二号弹簧42的弹性进行移动,在撞击块24的移动过程中,其侧壁上安装的固定杆52会和撞击球51进行撞击,产生持续的震动效果,同时三号弹簧53的弹性可以辅助撞击块24 进行复位,带动撞击块24进行移动,在刮板14对限位柱1侧壁进行刮除处理时,其引导板6在扭簧作用下向外展开,引导灰尘杂质等颗粒向外排出,在限位柱1完全收纳进入收纳管11内部时,刮板14在扭簧作用下贴合在限位柱1顶端,引导板6在一号磁铁7和二号磁铁71磁力相吸下收纳在限位槽 61内部,在引导板6向外展开后,一对支撑杆8利用和二号转轴81之间的扭簧连接引导板6进行支撑,对重物的冲击进行缓冲,在支撑杆8的移动过程中,四号弹簧9可以辅助支撑杆8进行移动。
44.上述前、后、左、右、上、下均以说明书附图中的图1为基准,按照人物观察视角为标准,装置面对观察者的一面定义为前,观察者左侧定义为左,依次类推。
45.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明保护范围的限制。
46.以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1