一种多功能海上钢箱梁施工平台的制作方法
1.本发明涉及海上施工设备技术领域,具体涉及一种多功能海上钢箱梁施工平台。
背景技术:
2.目前,海上施工平台的搭建施工大多采用打入钢管桩作为支撑搭设平台,它可以为施工提供充足和稳定的工作面,但这种施工平台受到海洋环境等诸多因素的影响,对平台搭建的施工技术和框架材料要求都比较高,其施工难度也较大,并且位置固定,不适用于多点施工和工位复杂的桥梁项目。且钢管桩平台的搭设和拆除工艺繁琐、位置固定损伤钢梁表面、施工速度慢、耗费材料较多,灌注桩施工中还需要加工钢护筒,相对增加了工程成本。
技术实现要素:
3.基于上述现有技术中存在的问题,本发明提供了一种多功能海上钢箱梁施工平台,并具体公开了以下技术方案:
4.一种多功能海上钢箱梁施工平台,包括两个下部平台,所述下部平台上分别滑动设置有伸缩梁,两所述伸缩梁相互靠近的一端可拆卸连接,所述下部平台的上端分别固定连接有竖向支撑臂,所述竖向支撑臂的顶端分别连接有上部平台,所述上部平台的一端底部与竖向支撑臂固定连接,另一端的底部分别固定连接有走行机构,所述上部平台的底端靠近竖向支撑臂的一侧还设置有丝杆顶架。
5.进一步的,所述走行机构包括走行架,所述走行架的顶端固定连接在上部平台上,所述走行架的底端四角处分别设置有液压可伸缩支腿,所述液压可伸缩支腿的底端安装有走行轮。
6.进一步的,所述走行架上固定安装有驱动电机,所述驱动电机通过齿轮箱驱动走行轮转动。
7.进一步的,两所述伸缩梁相互靠近的一端通过插销以及u型螺栓进行固定。
8.进一步的,所述下部平台为中空的长方体桁架结构,所述伸缩梁贯穿下部平台的中心孔且与下部平台滑动连接。
9.进一步的,所述伸缩梁与所述下部平台之间通过固定销进行限位固定。
10.进一步的,两所述上部平台相互靠近的一端通过可调撑杆机构连接。
11.进一步的,所述可调撑杆机构包括四个呈矩形平行分布的第一调节杆,所述第一调节杆包括第一双头长丝杆,所述第一双头长丝杆的两端分别通过第一丝母杆连接有第一叉头丝杆,所述第一调节杆通过两端的第一叉头丝杆分别与两侧的上部平台连接,两相邻的第一调节杆之间均呈八字形连接有两个第二调节杆,所述第二调节杆包括第二丝母杆以及第二丝母杆两端的第二叉头丝杆,所述第二调节杆两端的第二叉头丝杆分别铰接在两相邻的第一双头长丝杆上。
12.进一步的,所述可调撑杆机构包括四个呈矩形平行分布的第三调节杆,所述第三
调节杆包括第三双头长丝杆,所述第三双头长丝杆的一端与一侧的上部平台连接,另一端通过第三丝母杆连接有第三叉头丝杆,所述第三叉头丝杆远离第三双头长丝杆的一端与另一侧的上部平台连接,两相邻第三调节杆之间均呈人字形连接有两个第四调节杆,所述第四调节杆包括第四丝母杆以及第四丝母杆两端的第四叉头丝杆,所述第四调节杆两端的第四叉头丝杆分别铰接在两相邻的第三双头长丝杆上。
13.进一步的,所述竖向支撑臂上位于上部平台的下方还固定设置有挑臂平台,所述挑臂平台的底端通过支撑杆与下部平台连接。
14.与现有技术相比,本发明的有益效果在于:
15.本发明中通过设置上上部平台、下部平台、竖向支撑臂、伸缩梁以及可调撑杆机构形成一个闭环的施工平台,从而悬挂在已有的桥段上,因此省略了传统的管桩打设与拆除步骤,提高了施工效率,节省了施工成本;伸缩梁以及可调撑杆机构均可以实现长度调节,能更好的适应不同的桥宽,挑臂平台位于上部平台的下方,能够适应桥面变横坡或变纵坡等情况,走行架的底端四角处分别设置有液压可伸缩支腿,通过调整液压可伸缩支腿的高度,可以保证走行轮不会出现脱空问题。
附图说明
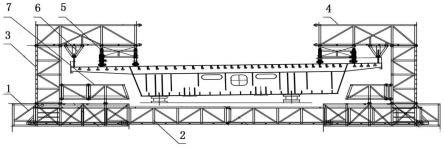
16.图1为本发明的整体结构示意图。
17.图2为本发明过墩状态时的结构示意图。
18.图3为本发明走行机构的结构示意图。
19.图4为实施例1中可调撑杆机构的俯视图。
20.图5为实施例2中可调撑杆机构的俯视图。
21.1-下部平台、2-伸缩梁、3-竖向支撑臂、4-上部平台、5-走行机构、51-走行架、52-液压可伸缩支腿、53-走行轮、54-驱动电机、55-齿轮箱、6-丝杆顶架、7-挑臂平台、8-第一调节杆、9-第二调节杆、10-第三调节杆、11-第四调节杆。
具体实施方式
22.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
23.实施例1
24.一种多功能海上钢箱梁施工平台,包括两个下部平台1,所述下部平台1上分别滑动设置有伸缩梁2,两所述伸缩梁2相互靠近的一端可拆卸连接,所述下部平台1的上端分别固定连接有竖向支撑臂3,所述竖向支撑臂3的顶端分别连接有上部平台4,所述上部平台4的一端底部与竖向支撑臂3固定连接,另一端的底部分别固定连接有走行机构5,所述上部平台4的底端靠近竖向支撑臂3的一侧还设置有丝杆顶架6。
25.本实施例中,所述走行机构5包括走行架51,所述走行架51的顶端固定连接在上部平台4上,所述走行架51的底端四角处分别设置有液压可伸缩支腿52,所述液压可伸缩支腿52的底端安装有走行轮53。
26.液压可伸缩支腿52的高度可以分别进行调节,因此可以保证走行过程中走行轮53不会脱离桥面,同时还能够保证两侧的伸缩梁2均处于水平状态。
27.在本实施例中,所述走行架51上固定安装有驱动电机54,所述驱动电机54通过齿轮箱55驱动走行轮53转动。施工平台两侧的走行机构5均由各自的驱动电机进行驱动,也可以通过控制器进行同步控制,因此能更好的适应变横坡桥面的施工。
28.在本实施例中,两所述伸缩梁2相互靠近的一端通过插销以及u型螺栓进行固定,可以便于两伸缩梁2的连接和断开,进行施工时,两伸缩梁2连接在一起,可以提高整个平台的稳定性和安全性,走行过桥墩时,两伸缩梁2断开,从而更好的实现过桥墩操作。
29.本实施例中,所述下部平台1为中空的长方体桁架结构,所述伸缩梁2贯穿下部平台1的中心孔且与下部平台1滑动连接,便于伸缩梁2的滑动,滑动完成后,可以通过固定销对伸缩梁2与下部平台1进行限位固定。
30.本实施例中,两所述上部平台4相互靠近的一端通过可调撑杆机构连接,所述可调撑杆机构包括四个呈矩形平行分布的第一调节杆8,所述第一调节杆8包括第一双头长丝杆,所述第一双头长丝杆的两端分别通过第一丝母杆连接有第一叉头丝杆,所述第一调节杆8通过两端的第一叉头丝杆分别与两侧的上部平台4连接,两相邻的第一调节杆8之间均呈八字形连接有两个第二调节杆9,所述第二调节杆9包括第二丝母杆以及第二丝母杆两端的第二叉头丝杆,所述第二调节杆9两端的第二叉头丝杆分别铰接在两相邻的第一双头长丝杆上。
31.上述可调撑杆机构的结构设置,可以便于对两侧上部平台4之间的间距进行调节,从而能更好的适应不同宽度的桥面。
32.本实施例中,所述竖向支撑臂3上位于上部平台4的下方还固定设置有挑臂平台7,所述挑臂平台7的底端通过支撑杆与下部平台1连接,可以进一步调高平台的整体稳定性。
33.实施例2
34.本实施例的技术方案与实施例1大体相同,唯一的不同点在于本实施例中的可调撑杆机构包括四个呈矩形平行分布的第三调节杆10,所述第三调节杆10包括第三双头长丝杆,所述第三双头长丝杆的一端与一侧的上部平台4连接,另一端通过第三丝母杆连接有第三叉头丝杆,所述第三叉头丝杆远离第三双头长丝杆的一端与另一侧的上部平台4连接,两相邻第三调节杆10之间均呈人字形连接有两个第四调节杆11,所述第四调节杆11包括第四丝母杆以及第四丝母杆两端的第四叉头丝杆,所述第四调节杆11两端的第四叉头丝杆分别铰接在两相邻的第三双头长丝杆上。
35.本实施例中的可调撑杆机构的结构设置,同样可以便于对两侧上部平台4之间的间距进行调节,从而能更好的适应不同宽度的桥面。
36.本发明的工作原理为:
37.行走状态:走行机构5与桥面接触,收起丝杆顶架6,下部的伸缩梁2为连接状态,驱动电机54驱动齿轮箱55工作,进而通过齿轮传动带动走行轮53转动,实现施工平台的前进及后退,通过控制下部伸缩梁2的伸缩量可以调节施工平台的跨度,从而适应不同的桥宽。
38.施工状态:在行走状态下将施工平台移动到桥梁环焊缝施工位置,放下丝杆顶架6与桥面接触,支撑固定,收起走行轮53,下部的伸缩梁2为连接状态,保持施工平台的稳定,然后施工人员即可在平台的各个位置进行施工。
39.过墩状态:放下走行轮53与桥面接触,连接可调撑杆机构,收起丝杆顶架6,下部的伸缩梁2调整为收缩断开状态,保证施工平台移动过程中与桥墩的安全距离,然后同行走状态,驱动电机54驱动齿轮箱55工作,进而通过齿轮传动带动走行轮53转动,实现施工平台的前进及后退,通过提前调整可调撑杆机构的长度,从而适应不同的桥宽。
40.以上所述,仅是本发明较佳实施例而已,并非对本发明的技术范围作任何限制,故凡是依据本发明的技术实质对以上实施例所作的任何细微修改、等同变化与修饰,均仍属于本发明技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1