空心薄壁高墩可调节式滑翻结合施工平台及施工方法与流程
1.本发明涉及桥梁施工技术领域,特别涉及空心薄壁高墩可调节式滑翻结合施工平台及施工方法。
背景技术:
2.近年来随着我国桥梁高度的不断提升,高墩施工成为制约桥梁工程进展的关键工序,高墩施工建设中传统的施工方法有滑模、爬模、翻模、辊模等。
3.然而,就目前传统空心薄壁高墩施工方法而言,高墩施工质量、施工效率和人员安全问题均存在一定问题,例如,翻模施工过程中危险性大、工期长、成本高;滑模施工过程中混凝土结构物表面质量差、缺陷严重等问题。
技术实现要素:
4.有鉴于此,本发明提供空心薄壁高墩可调节式滑翻结合施工平台及施工方法,其具有模板投入少、节约成本、功效高、安全系数高,可以大幅度缩减施工工期,减少了施工人数,提高了施工精度,外观质量更高,具有良好的经济效益和社会效益。
5.本发明提供了空心薄壁高墩可调节式滑翻结合施工平台及施工方法,具体包括:墩柱混凝土;
6.支撑杆,所述支撑杆浇筑在墩柱混凝土的内部,且支撑杆的顶部漏出墩柱混凝土;
7.墩柱钢筋架,所述墩柱钢筋架与支撑杆固定连接,墩柱钢筋架浇筑在墩柱混凝土的内部;
8.液压千斤顶,所述液压千斤顶套在支撑杆的上部;
9.爬行架,所述爬行架通过液压千斤顶支撑在支撑杆外侧,外侧的爬行架相互连接共同构成环状结构,内侧的爬行架内侧共同固定连接有一组内圈梁;
10.模板滑移组件,所述模板滑移组件设置在爬行架的顶部;
11.钢筋混凝土施工平台,所述钢筋混凝土施工平台设置在爬行架的上部;
12.防护围栏,所述防护围栏位于钢筋混凝土施工平台的外侧;
13.外模安装拆卸平台,所述外模安装拆卸平台设置在外侧的爬行架下部;
14.外观缺陷修复操作平台,所述外观缺陷修复操作平台设置在外模安装拆卸平台下部;
15.墩柱模板,所述墩柱模板位于墩柱混凝土的内外表面,且墩柱模板顶部通过吊环和吊索悬挂在模板滑移组件的底部,内、外的墩柱模板倒角均通过对拉螺杆拉紧;
16.所述内圈梁的顶部设置有钢筋混凝土施工平台;
17.内模安装拆卸平台,所述内模安装拆卸平台设置在内圈梁的下部;
18.所述操作平台限位固定支撑杆连接在爬行架与墩柱模板之间;
19.所述爬行架、内圈梁、钢筋混凝土施工平台、外观缺陷修复操作平台、内模安装拆卸平台和外模安装拆卸平台的桁架为焊接、栓接结构。
20.可选地,所述模板滑移组件包括有:
21.选择丝杠,选择丝杠转动连接在爬行架内部;
22.旋转链轮,旋转链轮同轴固定连接在选择丝杠的端部;
23.选择操作链条,选择操作链条套在旋转链轮的外侧。
24.可选地,所述模板滑移组件包括有:
25.选择滑动座,选择滑动座滑动连接在爬行架的内部,选择丝杠与选择滑动座螺纹传动连接共同构成丝杠螺母传动副。
26.可选地,所述模板滑移组件包括有:
27.滑动传动轴,滑动传动轴转动连接在选择滑动座的侧面;
28.滑动传动滑槽,滑动传动滑槽圆周阵列排布开设在滑动传动轴的端部;
29.滑动链轮,滑动链轮通过滑动传动滑槽滑动连接在滑动传动轴的端部;
30.滑动链条,滑动链条套在滑动链轮的外侧。
31.可选地,所述模板滑移组件包括有:
32.同步滑动主动齿轮,同步滑动主动齿轮共设置有四组,四组同步滑动主动齿轮均匀排布固定连接在滑动传动轴外侧;
33.单动滑动主动齿轮,单动滑动主动齿轮共设置有四组,四组单动滑动主动齿轮固定连接在滑动传动轴外侧,四组单动滑动主动齿轮分别位于四组同步滑动主动齿轮的同一侧,且四组单动滑动主动齿轮与四组同步滑动主动齿轮之间的距离分别为两倍齿轮厚度、四倍齿轮厚度、六倍齿轮厚度、八倍齿轮厚度;
34.滑动从动齿轮,滑动从动齿轮共设置有四组,四组滑动从动齿轮均匀排布转动连接在爬行架内部,且滑动从动齿轮位于单动滑动主动齿轮和同步滑动主动齿轮的下部;滑动从动齿轮与单动滑动主动齿轮或者同步滑动主动齿轮啮合共同构成齿轮传动机构。
35.可选地,所述模板滑移组件包括有:
36.滑动主动锥齿轮,滑动主动锥齿轮同轴固定连接在滑动从动齿轮的侧面;
37.滑动从动锥齿轮,滑动从动锥齿轮转动连接在爬行架的内部,滑动从动锥齿轮与滑动主动锥齿轮啮合共同构成锥齿轮传动机构。
38.可选地,所述模板滑移组件包括有:
39.滑动传动丝杠,滑动传动丝杠为带槽丝杠结构,滑动传动丝杠滑动连接在爬行架内部;
40.滑动板,滑动板滑动连接在爬行架的上部;
41.滑动传动球头,滑动传动球头固定连接在滑动传动丝杠的端部,滑动传动丝杠通过滑动传动球头与滑动板球面连接;
42.滑动从动锥齿轮与滑动传动丝杠螺纹传动连接共同构成丝杠螺母传动副。
43.可选地,所述模板滑移组件包括有:
44.滑动导向滚轮,滑动导向滚轮共设置有多组,多组滑动导向滚轮均匀排布在滑动板的两侧底部。
45.可选地,所述选择操作链条的长度为旋转链轮的分度圆周长与选择丝杠的圈数的乘积,且选择操作链条上均匀涂装有五种颜色的色漆,当滑动从动齿轮分别与单动滑动主动齿轮或者同步滑动主动齿轮啮合时,操作者手中的选择操作链条呈现不同的颜色。
46.有益效果
47.根据本发明的各实施例的空心薄壁高墩施工平台及施工方法模板投入少、节约成本、功效高、安全系数高,可以大幅度缩减施工工期,减少了施工人数,提高了施工精度,外观质量更高,具有良好的经济效益和社会效益。
48.此外,即实现了四组滑动传动丝杠同时调节,又能够单独对其中任意一组滑动传动丝杠进行调节,实现对墩柱模板的位置的精确调节保证施工质量,同时在施工时,在内模安装拆卸平台和外模安装拆卸平台就可以对模板滑移组件进行操作,可以边施工边操作,不需要额外的模板控制施工人员,使用方便,减少了人员投入,通过模板滑移组件的设置,可适应单向、双向变截面高墩的模板调节,减少了施工难度,提高了施工效率。
49.此外,本发明按照工艺顺序设置三层操作平台,施工中互不干扰,解决了施工、修复、养生交叉作业问题,便于管理提高了施工效率和施工质量。
50.此外,本工法相较于滑模施工,在外观质量上更具优势,在满足混凝土强度后进行翻滑顶升,避免了对混凝土面磨损。混凝土质量方面,单次浇筑2.25米,混凝土不存在离析风险。
51.此外,滑翻结合施工方式与正常施工方式相比,大幅度缩减了施工工期,减少了施工人数,可以节约40%的成本,效益显著。
52.此外,对整体桁架进行焊接、栓接,提高滑翻施工平台的整体安全性和稳定性;增加模板操作系统限位丝杆,便于模板固定、打磨;改进模板吊杆与平台轨车设置形式,便于变截面墩身施工,提高施工进度,在项目中取得了良好的成效,在运用空心薄壁高墩施工过程中,将不仅对整个行业产生重大影响,而且对于实现节能减排、改善人民群众环境健康,建立节约型的和谐社会起到积极和长远的作用。
附图说明
53.为了更清楚地说明本发明的实施例的技术方案,下面将对实施例的附图作简单地介绍。
54.下面描述中的附图仅仅涉及本发明的一些实施例,而非对本发明的限制。
55.在附图中:
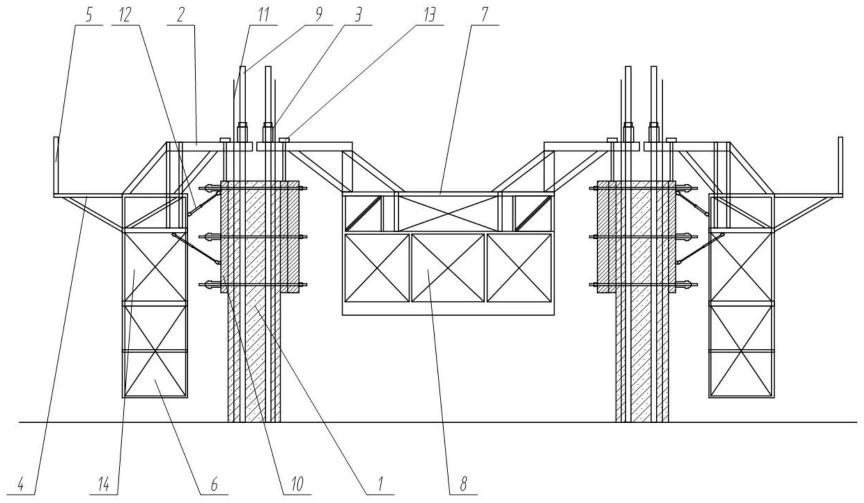
56.图1示出了根据本发明的实施例的空心薄壁高墩施工平台的横向剖视的示意图;
57.图2示出了根据本发明的实施例的空心薄壁高墩施工平台的纵向剖视的示意图;
58.图3示出了根据本发明的实施例的空心薄壁高墩施工平台的模板滑移组件的轴侧示意图;
59.图4示出了根据本发明的实施例的空心薄壁高墩施工平台的模板滑移组件的底部示意图;
60.图5示出了根据本发明的实施例的空心薄壁高墩施工平台的模板滑移组件的传动示意图;
61.图6示出了根据本发明的实施例的空心薄壁高墩施工平台的选择滑动座的传动示意图;
62.图7示出了根据本发明的实施例的空心薄壁高墩施工平台的滑动板的传动示意图;
63.图8示出了根据本发明的实施例的空心薄壁高墩施工平台的滑动板的示意图;
64.图9示出了根据本发明的实施例的空心薄壁高墩施工平台的滑动传动丝杠的轴侧示意图。
65.附图标记列表
66.1、墩柱混凝土;2、爬行架;3、液压千斤顶;4、钢筋混凝土施工平台;5、防护围栏;6、外观缺陷修复操作平台;7、内圈梁;8、内模安装拆卸平台;9、支撑杆;10、墩柱模板;11、墩柱钢筋架;12、操作平台限位固定支撑杆;13、模板滑移组件;1301、选择操作链条;1302、选择丝杠;1303、旋转链轮;1304、选择滑动座;1305、滑动传动轴;1306、滑动传动滑槽;1307、滑动链轮;1308、滑动链条;1309、同步滑动主动齿轮;1310、单动滑动主动齿轮;1311、滑动从动齿轮;1312、滑动主动锥齿轮;1313、滑动传动丝杠;1314、滑动从动锥齿轮;1315、滑动板;1316、滑动传动球头;1317、滑动导向滚轮;14、外模安装拆卸平台。
具体实施方式
67.为了使得本发明的技术方案的目的、方案和优点更加清楚,下文中将结合本发明的具体实施例的附图,对本发明实施例的技术方案进行清楚、完整的描述。除非另有说明,否则本文所使用的术语具有本领域通常的含义。附图中相同的附图标记代表相同的部件。
68.实施例:请参考图1至图8:
69.本发明提出了空心薄壁高墩可调节式滑翻结合施工平台及施工方法,包括:墩柱混凝土1;
70.支撑杆9,支撑杆9浇筑在墩柱混凝土1的内部,且支撑杆9的顶部漏出墩柱混凝土1;
71.墩柱钢筋架11,墩柱钢筋架11与支撑杆9固定连接,墩柱钢筋架11浇筑在墩柱混凝土1的内部;
72.液压千斤顶3,液压千斤顶3套在支撑杆9的上部;液压千斤顶3的工作原理为:工作时,先将支撑杆9由上向下插入千斤顶中心孔,然后开动油泵由油嘴进油,由于上卡头与支承杆锁紧,活塞不能下行,在高压油液的作用下整个缸体被举起,当上升至上、下卡头相互顶紧时,即完成一个提升过程。排油时上卡头放松,下卡头锁紧,上卡头及活塞被排油弹簧向上推动复位,一次循环的行程一般为20mm~30mm,如此往复动作,液压千斤顶3即带动爬行架2沿着支承杆不断爬升;
73.爬行架2,爬行架2通过液压千斤顶3支撑在支撑杆9外侧,外侧的爬行架2相互连接共同构成环状结构,内侧的爬行架2内侧共同固定连接有一组内圈梁7;
74.模板滑移组件13,模板滑移组件13设置在爬行架2的顶部;
75.钢筋混凝土施工平台4,钢筋混凝土施工平台4设置在爬行架2的上部;
76.防护围栏5,防护围栏5位于钢筋混凝土施工平台4的外侧;
77.外模安装拆卸平台14,外模安装拆卸平台14设置在外侧的爬行架2下部;
78.外观缺陷修复操作平台6,外观缺陷修复操作平台6设置在外模安装拆卸平台14下部;
79.墩柱模板10,墩柱模板10位于墩柱混凝土1的内外表面,且墩柱模板10顶部通过吊环和吊索悬挂在模板滑移组件13的底部,内、外的墩柱模板10倒角均通过对拉螺杆拉紧;
80.内圈梁7的顶部设置有钢筋混凝土施工平台4;
81.内模安装拆卸平台8,内模安装拆卸平台8设置在内圈梁7的下部;
82.操作平台限位固定支撑杆12连接在爬行架2与墩柱模板10之间;
83.爬行架2、内圈梁7、钢筋混凝土施工平台4、外观缺陷修复操作平台6、内模安装拆卸平台8和外模安装拆卸平台14的桁架为焊接、栓接结构。
84.此外,根据本发明的实施例,如图6所示,模板滑移组件13包括有:
85.选择丝杠1302,选择丝杠1302转动连接在爬行架2内部;
86.旋转链轮1303,旋转链轮1303同轴固定连接在选择丝杠1302的端部;
87.选择操作链条1301,选择操作链条1301套在旋转链轮1303的外侧,在使用中,当操作选择操作链条1301,选择操作链条1301带动旋转链轮1303旋转,旋转链轮1303带动选择丝杠1302旋转。
88.此外,根据本发明的实施例,如图6所示,模板滑移组件13包括有:
89.选择滑动座1304,选择滑动座1304滑动连接在爬行架2的内部,选择丝杠1302与选择滑动座1304螺纹传动连接共同构成丝杠螺母传动副,在使用中,当选择丝杠1302旋转,选择丝杠1302通过由选择丝杠1302与选择滑动座1304共同构成的丝杠螺母传动副带动选择滑动座1304滑动。
90.此外,根据本发明的实施例,如图7所示,模板滑移组件13包括有:
91.滑动传动轴1305,滑动传动轴1305转动连接在选择滑动座1304的侧面;
92.滑动传动滑槽1306,滑动传动滑槽1306圆周阵列排布开设在滑动传动轴1305的端部;
93.滑动链轮1307,滑动链轮1307通过滑动传动滑槽1306滑动连接在滑动传动轴1305的端部;
94.滑动链条1308,滑动链条1308套在滑动链轮1307的外侧,在使用中,当操作滑动链条1308,滑动链条1308带动滑动链轮1307旋转,滑动链轮1307通过滑动传动滑槽1306带动滑动传动轴1305旋转。
95.此外,根据本发明的实施例,如图7所示,模板滑移组件13包括有:
96.同步滑动主动齿轮1309,同步滑动主动齿轮1309共设置有四组,四组同步滑动主动齿轮1309均匀排布固定连接在滑动传动轴1305外侧;
97.单动滑动主动齿轮1310,单动滑动主动齿轮1310共设置有四组,四组单动滑动主动齿轮1310固定连接在滑动传动轴1305外侧,四组单动滑动主动齿轮1310分别位于四组同步滑动主动齿轮1309的同一侧,且四组单动滑动主动齿轮1310与四组同步滑动主动齿轮1309之间的距离分别为两倍齿轮厚度、四倍齿轮厚度、六倍齿轮厚度、八倍齿轮厚度;
98.滑动从动齿轮1311,滑动从动齿轮1311共设置有四组,四组滑动从动齿轮1311均匀排布转动连接在爬行架2内部,且滑动从动齿轮1311位于单动滑动主动齿轮1310和同步滑动主动齿轮1309的下部;滑动从动齿轮1311与单动滑动主动齿轮1310或者同步滑动主动齿轮1309啮合共同构成齿轮传动机构,在使用中,当滑动传动轴1305旋转,滑动传动轴1305通过齿轮传动机构带动滑动从动齿轮1311旋转。
99.此外,根据本发明的实施例,如图7所示,模板滑移组件13包括有:
100.滑动主动锥齿轮1312,滑动主动锥齿轮1312同轴固定连接在滑动从动齿轮1311的
侧面;
101.滑动从动锥齿轮1314,滑动从动锥齿轮1314转动连接在爬行架2的内部,滑动从动锥齿轮1314与滑动主动锥齿轮1312啮合共同构成锥齿轮传动机构,在使用中,当滑动从动齿轮1311旋转,滑动从动齿轮1311通过由滑动从动锥齿轮1314与滑动主动锥齿轮1312啮合共同构成的锥齿轮传动机构带动滑动从动锥齿轮1314旋转。
102.此外,根据本发明的实施例,如图7所示,模板滑移组件13包括有:
103.滑动传动丝杠1313,滑动传动丝杠1313为带槽丝杠结构,滑动传动丝杠1313滑动连接在爬行架2内部;
104.滑动板1315,滑动板1315滑动连接在爬行架2的上部;
105.滑动传动球头1316,滑动传动球头1316固定连接在滑动传动丝杠1313的端部,滑动传动丝杠1313通过滑动传动球头1316与滑动板1315球面连接;
106.滑动从动锥齿轮1314与滑动传动丝杠1313螺纹传动连接共同构成丝杠螺母传动副,在使用中,当滑动从动锥齿轮1314旋转,滑动从动锥齿轮1314通过由滑动从动锥齿轮1314与滑动传动丝杠1313螺纹传动连接共同构成的丝杠螺母传动副带动滑动板1315前后滑动,调节滑动板1315的位置。
107.此外,根据本发明的实施例,如图8所示,模板滑移组件13包括有:
108.滑动导向滚轮1317,滑动导向滚轮1317共设置有多组,多组滑动导向滚轮1317均匀排布在滑动板1315的两侧底部,在使用中,通过滑动导向滚轮1317实现了对滑动板1315的导向同时通过多组滑动导向滚轮1317保证载荷均布,提高支撑能力。
109.此外,根据本发明的实施例,选择操作链条1301的长度为旋转链轮1303的分度圆周长与选择丝杠1302的圈数的乘积,且选择操作链条1301上均匀涂装有五种颜色的色漆,当滑动从动齿轮1311分别与单动滑动主动齿轮1310或者同步滑动主动齿轮1309啮合时,操作者手中的选择操作链条1301呈现不同的颜色,在使用中,通过选择操作链条1301颜色可以确定滑动从动齿轮1311与单动滑动主动齿轮1310或者同步滑动主动齿轮1309啮合关系,方便对调节操作。
110.本实施例的具体使用方式与作用:本发明中,空心薄壁高墩滑翻结合施工工艺流程为:施工准备
→
测量放样
→
安装墩身底节钢筋
→
预埋外侧平台系统支撑杆
→
安装外侧钢筋、混凝土操作平台系统及爬升系统
→
浇筑底节混凝土
→
外侧模板拆除、清理、提升准备就位
→
绑轧第二节段钢筋
→
安装第二节段内模、外侧混凝土修复操作平台
→
浇筑第二节段墩身混凝土
→
预埋内侧平台系统爬升钢管支撑杆、接长外侧平台支撑杆、外侧模板拆除、清理、提升准备就位
→
绑轧第三节段钢筋
→
安装外侧混凝土外观修饰操作平台及爬升、喷淋养护系统
→
安装第三节段内模
→
浇筑第三节段混凝土
→
安装内操作平台系统
→
外侧模板拆除、清理、内、外侧提升准备就位
→
模板与操作平台固定
→
浇筑混凝土、接长支撑杆、绑轧上节墩身钢筋
→
重复以上步骤直至墩身封顶,系统装置拆除。
111.具体施工要求如下:
112.a、施工准备
113.滑翻施工装置制作与安装;
114.a1、模板系统
115.模板系统包括内、外模板、模板与操作平台限位、固定丝杆、模板吊杆、对拉螺杆;
116.模板采用大块钢模板,模板高度为2.35m,模板在专业模板加工厂制作,现场拼装;
117.a2、操作平台系统
118.操作平台系统由操作平台圈梁、钢筋、混凝土施工操作平台、模板安、拆操作平台、砼缺陷修复平台、操作平台围护栏杆组成;
119.1)圈梁:采用∠75
×
75的角钢现场加工、焊接而成,圈梁断面尺寸为80cm
×
80cm;
120.2)钢筋、混凝土施工操作平台:采用∠60
×
60的角钢现场加工、焊接固定在操作平台围圈上;用于堆放施工工具、钢筋半成品材料、液压系统控制箱等;操作平台面用5cm厚木板铺设,平台宽度1.6m—2.5m;
121.3)模板安、拆操作平台:采用∠50
×
50的角钢现场加工,与操作平台圈梁焊接;用于人工装、脱模板平台,平台面用5cm厚木板铺设,平台宽度80cm;
122.4)砼缺陷修复平台:采用∠30
×
30的角钢现场加工、与下层人工操作平台焊接;用于砼质量缺陷修复;平台面用5cm厚木板铺设,平台宽度80cm;
123.a3、液压爬升系统
124.液压爬升系统由支撑杆、爬升架、千斤顶、液压泵组成;
125.1)支撑杆:支撑杆采用直径为φ48mm钢管,钢管壁厚4mm,底节墩身施工时,安装在墩身中,以后逐节焊接加长;支撑杆与墩身钢筋主筋焊接加固点间距不大于40cm;
126.2)爬升架:爬升架横梁采用2[180槽钢,立杆采用一根[180槽钢,斜撑采用2[100槽钢,立杆通过焊接与围圈连接成一体;
[0127]
3)千斤顶:采用qyd-100型楔块式液压千斤顶,理论起重量100kn,工作起重量50kn;外平台系统布置十台,内平台系统布置六台,千斤顶内通过两个内齿卡环循环工作沿支撑杆向上爬升;
[0128]
4)液压泵:液压泵根据千斤顶数量进行选择,以保证墩身所有千斤顶能同步工作;
[0129]
a4、操作平台系统及液压爬升系统强度、刚度及稳定性通过验算,满足规范及施工安全要求;
[0130]
b、底节实心段施工
[0131]
b1、测量控制点位放样,控制墩身平面位置及操作平台位置;
[0132]
b2、安装墩身钢筋、预埋变截面段内模加固钢筋;
[0133]
b3、平面高程测量,用水泥砂浆带调整外模底标高使其水平;
[0134]
b4、安装外侧模板,调节模板垂直度并加固外侧模板;模板平面位置及直度检测;
[0135]
b5、安装操作平台系统模板安、拆操作平台、喷淋养护管道及喷嘴,然后安装平台圈梁,模板安、拆操作平台与圈梁间用钢筋绑条焊连接;安装顶层人工操作平台及护栏;
[0136]
b6、安装爬升系统爬架,爬架与圈梁采用焊接,保证焊接长度及焊缝质量;
[0137]
b7、预埋外侧平台支撑杆,安装提升系统千斤顶;支撑杆安装垂直并加固,千斤顶与爬架之间采用螺栓连接,螺栓齐全、稳固;
[0138]
b8、浇筑墩身底节(第一节)混凝土,养护;混凝土可采用吊车配吊斗浇筑或混凝土泵车浇筑;混凝土浇筑时分层浇筑,浇筑速度不宜过快;底节混凝土与承台混凝土浇筑时间宜控制在7天以内;
[0139]
c、墩身外侧模板拆除、清理
[0140]
c1、安装外侧模板吊杆及水平滑车
[0141]
c2、混凝土强度达到1.5mpa后脱模,外侧模板脱模,通过外侧模板吊杆提模板,模板吊杆采用18mm精钢筋及同配套螺母;
[0142]
c3、移动水平滑车,使模板远离墩身表面,清理模板表面,涂脱模剂;
[0143]
d外模爬升第二节变截面施工
[0144]
d1、外侧模板清理、涂脱模剂完成后,通过模板吊杆水平滑车向墩身表面移动至距离墩身表面2cm;
[0145]
d2、通过限位丝杆对模板进行限固、稳固;
[0146]
d3、安装第二节段墩身钢筋、提升外侧平台及模板,当爬升千斤顶爬至离已浇筑混凝土面100cm,停止爬升操作,用钢筋将支撑杆与墩身钢筋焊接后,继续爬升平台系统,安装墩身钢筋,当爬升千斤顶爬至离已浇筑混凝土面200cm,停止爬升操作,用钢筋将支撑杆与墩身钢筋焊接,形成第二道连接加固;然后安装墩身钢筋、爬升平台系统至第二节段墩身高度;平台系统提升时,在支撑杆上安装限位卡,保证各千斤顶爬升高度一致,,每20cm调整一次,同时调节供油阀门,以保证各千斤顶受力均匀;爬升前,清理平台上杂物,平台荷载对称均匀摆放;
[0147]
d4、喷淋养护已浇筑节段混凝土;
[0148]
d5、安装内、外模板,内侧模板可采用标准段面内模;外侧板模垂直度及水平位置检测,内、外模板调整及加固;
[0149]
e、第二节变截面段混凝土施工
[0150]
e1、模板加固检验合格后,浇筑第二节段混凝土;
[0151]
e2、安装外侧混凝土外观缺陷修复平台,混凝土外观缺陷修复平台与模板安、拆平台之间用钢筋绑条焊连接;
[0152]
f、外模提升第三节段变截面段施工
[0153]
f1、接长外侧操作平台支撑杆,上支撑杆端部加工成锥形,插入下支撑杆内,接口采用焊接,焊缝饱满,打磨平顺;上、下支撑杆要同心;同时预埋内侧平台系统支撑杆,支撑杆安装垂直,并加固;
[0154]
f2、外侧模板清理、涂脱模剂完成后,通过模板吊杆水平滑车向墩身表面移动至距离墩身表面2cm;
[0155]
f3、通过限位丝杆对模板进行限固、稳固;
[0156]
f4、操作平台系统、模板系统爬升;
[0157]
f5、喷淋养护已浇筑节段混凝土;
[0158]
f6安装内、外模板,内侧模板可采用标准段面内模;外侧板模垂直度及水平位置检测,内、外模板调整及加固;
[0159]
f7、同上浇筑第三节段变截面墩身混凝土
[0160]
g、安装内操作平台系统
[0161]
g1、混凝土达到拆模强度后,拆除内模,搭设内操作平台系统安装平台;
[0162]
g2、如前所述,安装内操作平台系统模板安、拆操作平台,然后安装内平台系统圈梁及爬升系统;
[0163]
h、内模板系统安装
[0164]
h1、通过模板吊杆,将内模悬吊于爬升架上,完成内模系统安装;
[0165]
h2、拆除内平台系统安装平台
[0166]
i、内、外模板提升第四节钢筋、模板安装段
[0167]
i1、如前述进行第四节段钢筋、模板及混凝施工
[0168]
j、浇筑第四节段混凝
[0169]
k、模板拆除、涂脱模剂
[0170]
k1、当混凝土强度达到拆模强度后,拆除内、外模板对拉螺杆及外模板限位固定丝杆;
[0171]
k2、内、外模板脱模并通过模板水平滑车使模板远离混凝土墩身表面;
[0172]
k3、内外模板表面清理、涂脱模剂;
[0173]
l、外模板限位、固定
[0174]
l1、外模清理、脱模剂完成后,通过模板吊杆水平滑车向墩身表面移动至距离墩身表面2cm;
[0175]
l2、通过限位丝杆对模板进行限固、稳固;外侧模板通过临时螺栓连接成一个整体;
[0176]
m、第五节段钢筋绑轧、内、外模板提升安装
[0177]
m1、提升平台系统,安装下一节段墩身钢筋、当爬升千斤顶爬至离已浇筑混凝土面100cm,停止爬升操作,用钢筋将支撑杆与墩身钢筋焊接后,继续爬升平台系统,安装墩身钢筋,当爬升千斤顶爬至离已浇筑混凝土面200cm,停止爬升操作,用钢筋将支撑杆与墩身钢筋焊接,形成第二道连接加固;然后安装墩身钢筋、爬升平台系统至下一节段墩身高度;
[0178]
m2、喷淋养护已浇筑节段混凝土;
[0179]
m3、拆除限位、固定丝杆,通过模板吊杆调整模板标高,检测板模垂直度及水平位置,加固模板;
[0180]
m4、模板检验合格后,安装限位、固定丝杆,稳固操作平台;
[0181]
m5、浇筑墩身混凝土,混凝土宜用拖泵浇筑;
[0182]
n、浇筑混凝土,重复步骤k至步骤m进行标准节段施工
[0183]
o、模板系统拆除
[0184]
o1、施工至墩顶后,墩顶仍保留3个节段模板;墩身混凝土强度大于10mpa时,拆除模板;拆除时按先底节段,再中节段,最后顶节段的顺序进行;每节段模板拆除,按安全网栏杆脚手架、平台和模板固定架、围带、连接螺栓,钢拉杆、钢模板的顺序进行;
[0185]
o2、系统拆除顺序和安装顺序相反,原则上先装的后拆,后装的先拆;采用半整体拆除方法;其顺序为:清理平台—内外模板—安全网、下部平台—圈梁—平台梁。
[0186]
在上述施工过程中,当需要调节墩柱模板10的位置时,操作选择操作链条1301,选择操作链条1301带动旋转链轮1303旋转,旋转链轮1303带动选择丝杠1302旋转,选择丝杠1302通过由选择丝杠1302与选择滑动座1304共同构成的丝杠螺母传动副带动选择滑动座1304滑动,通过选择滑动座1304的滑动改变滑动从动齿轮1311与单动滑动主动齿轮1310或者同步滑动主动齿轮1309啮合关系,同时,通过选择操作链条1301颜色可以确定滑动从动齿轮1311与单动滑动主动齿轮1310或者同步滑动主动齿轮1309啮合关系,方便对调节操作;当操作滑动链条1308,滑动链条1308带动滑动链轮1307旋转,滑动链轮1307通过滑动传动滑槽1306带动滑动传动轴1305旋转,滑动传动轴1305通过齿轮传动机构带动滑动从动齿
轮1311旋转,滑动从动齿轮1311通过由滑动从动锥齿轮1314与滑动主动锥齿轮1312啮合共同构成的锥齿轮传动机构带动滑动从动锥齿轮1314旋转,滑动从动锥齿轮1314通过由滑动从动锥齿轮1314与滑动传动丝杠1313螺纹传动连接共同构成的丝杠螺母传动副带动滑动板1315前后滑动,调节滑动板1315的位置,从而实现调节墩柱模板10的位置,即实现了四组滑动传动丝杠1313同时调节,又能够单独对其中任意一组滑动传动丝杠1313进行调节,实现对墩柱模板10的位置的精确调节保证施工质量。
[0187]
最后,需要说明的是,本发明在描述各个构件的位置及其之间的配合关系等时,通常会以一个/一对构件举例而言,然而本领域技术人员应该理解的是,这样的位置、配合关系等,同样适用于其他构件/其他成对的构件。
[0188]
以上所述仅是本发明的示范性实施方式,而非用于限制本发明的保护范围,本发明的保护范围由所附的权利要求确定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1