最佳整平器攻角设定及自动调节的制作方法
1.本发明总体上涉及铺路设备。更具体地,本发明涉及一种沥青铺路机。
背景技术:
2.铺路机用于将铺路材料相对均匀地施加、铺展和压实到所需表面上。这些机器通常用于道路、停车场和其它需要平滑耐用表面供汽车、卡车和其它车辆行驶的区域的建造。沥青铺路机通常包括用于从卡车接收沥青材料的料斗和用于将沥青从料斗向后传送以排放到路基上的输送机系统。螺旋钻可以用于将沥青横向地铺展在整平器前面的路基上。整平器上的整平器板使沥青材料平滑并稍微压实沥青材料,理想情况下留下均匀深度和平滑度的路基。
3.有时存在由于操作员使用的不良铺路实践而导致机器磨损和损耗的铺路问题。目前,当用沥青和浮式整平器铺路时,不良铺路实践是常见的。操作员通常不正确地设定整平器并且不正确地调节整平器,从而导致效果不理想或机器加速磨损。
4.cn 103161117讨论了一种基于传感器的摊铺机自动找平系统。
技术实现要素:
5.在根据本发明的示例中,一种铺路机可以包括框架;联接到框架的整平器;整平器包括主整平器板和延长整平器板,主整平器板和延长整平器板中的每一个具有与其相关联的角度传感器,用于主整平器板和延长整平器板中的每一个的角度传感器经定位和经配置确定主整平器板和延长整平器板的铺路角度;以及控制器,其经配置从角度传感器接收主整平器板和延长整平器板的铺路角度,并且彼此独立地改变主整平器板的铺路角度和延长整平器板的铺路角度。
6.在一个示例中,一种铺路机可以包括框架;联接到框架的整平器;整平器包括主整平器板和延长整平器板,主整平器板和延长整平器板中的每一个具有与其相关联的角度传感器,用于主整平器板和延长整平器板中的每一个的角度传感器经定位和经配置确定主整平器板和延长整平器板的铺路角度,其中主整平器板和延长整平器板中的每一个由一个或多个致动器控制,致动器经定位彼此独立地升高和降低主整平器板和延长整平器板的部分,使得主整平器板和延长整平器板可以具有不同的铺路角度;以及控制器,其经配置从角度传感器接收主整平器板和延长整平器板的铺路角度,并且基于存储在控制器中的历史铺路信息,使用一个或多个致动器彼此独立地改变主整平器板的铺路角度和延长整平器板的铺路角度。
7.在一个示例中,一种设定和调节整平器的攻角的方法可以包括测量主整平器板和延长整平器板中的每一个的铺路角度;以及彼此独立地改变主整平器板和延长整平器板的铺路角度,以达到主整平器板和延长整平器板中的每一个的适当的铺路角度。
附图说明
8.在不一定按比例绘制的附图中,相同的数字可以在不同的视图中描述相似的部件。具有不同字母后缀的相同数字可以表示相似部件的不同实例。附图通过示例而非限制的方式概括地示出了本文中讨论的各种实施例。
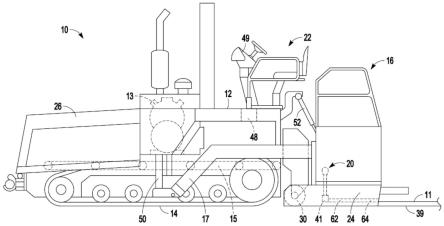
9.图1示出了根据一个实施例的铺路机的侧视图。
10.图2示出了根据一个实施例的整平器的部分的示意图。
11.图3示出了根据一个实施例的主整平器板和延长板的仰视图。
12.图4示出了根据一个实施例的设定和调节整平器的攻角的方法。
具体实施方式
13.图1示出了根据一个实施例的铺路机10的侧视图。铺路机10通常包括框架12,其具有与框架12联接的一组地面接合元件14,诸如履带或车轮。地面接合元件14可以由发动机13以常规方式驱动。整平器16可以定位在铺路机10的后端处,以将铺路材料铺展并压实成具有所需的厚度、尺寸、均匀性、胎冠轮廓和横向坡度的沥青垫11。铺路机10还包括具有座椅和控制台的操作员站22,操作员站22包括用于通过在输入面板49处输入指令来引导铺路机10的操作的各种控制器。提供控制器48用于电气控制铺路机10的各个方面。例如,控制器48可以在铺路机10的操作期间从铺路机的各个部件发送和接收信号。
14.铺路机10还包括用于存储铺路材料的料斗26,以及包括一个或多个输送机15的输送机系统,其经配置将铺路材料从料斗26移动到铺路机10后面的整平器16。一个或多个螺旋钻30布置在整平器16的前端附近,以接收由输送机15供应的铺路材料并将材料均匀地铺展在整平器16下方。
15.当铺路机10将铺路材料施加到表面(图1中的左侧)时,提及整平器16的“前”端是指整平器16面向铺路机10的行进方向的端。类似地,当铺路机10将铺路材料施加到表面时,提及整平器16的部件的“面向前”的表面是指面向铺路机10的行进方向的表面;而当铺路机10将铺路材料施加到表面(图1中的右侧)时,提及部件的“面向后”的表面是指背离铺路机10的行进方向的表面。
16.整平器16可以通过一对牵引臂17枢转地联接在铺路机10的后面,牵引臂17在铺路机的框架12和整平器16之间延伸。牵引臂17可以枢转地连接到框架12,使得整平器16相对于整平器框架和待铺路的表面的相对位置和定向可以通过枢转牵引臂17来调节,例如,以便控制由铺路机10沉积的铺路材料的厚度和坡度。
17.整平器16可以包括具有联接到整平器框架24的主整平器板62的整平器框架24。主整平器板62经配置浮在铺设在准备好的铺路床上的沥青垫11的铺路材料上,并“平滑”或平整和压实基底表面(诸如道路或路基)上的铺路材料。整平器16还可以包括一个或多个延长整平器板64,其延伸超过主整平器板62的宽度,以延伸整平器16的铺路宽度。
18.整平器16相对于牵引臂17的位置可以通过缸50控制或调节。缸50可以经升高或降低以改变整平器16的铺路角度或攻角。
19.而且,在整平器16上可以有一个或多个缸52,以允许整平器板62枢转,从而改变整平器16的攻角。还可以提供控制和/或调节整平器16的枢转位置的其它方法。
20.主整平器板62和延长整平器板64可以布置在框架24的底侧。主整平器板62和延长
整平器板64可以适于平滑并最初压在疏松的沥青材料上以形成道路表面。整平器框架24的枢转位置可以确定整平器板62、64的铺路角度,其可以限定相对于地面表面39的攻角,在地面表面39上施加沥青垫。
21.整平器16可以包括夯杆组件20,其定位在整平器板62的前面并横向于铺路机10的行进方向延伸。夯杆组件20可以包括夯杆41。夯杆组件20可以联接到整平器16的整平器框架24,并经配置使得夯杆41沿基本上垂直于沥青垫11和基本上垂直于铺路机10的行进方向的向上和向下方向往复运动。
22.如上所述,操作员的不良铺路实践会导致机器磨损和损耗。操作员通常不正确地设定整平器并且不正确地调节整平器,从而导致效果不理想或机器加速磨损。因此,本系统提供了一种将整平器的铺路角度改变为适当或最佳铺路角度的系统。
23.图2示出了根据一个实施例的整平器16的部分的示意图。图3示出了根据一个实施例的主整平器板62和延长整平器板64的仰视图。
24.在该示例中,主整平器板62被示出为在延长整平器板64的前面。在其它实施例中,延长整平器板64在前安装配置中可以在主整平器板的前面。
25.在该示例中,主整平器板62和延长整平器板64中的每一个可以包括与其相关联的角度传感器82、84。用于主整平器板62和延长整平器板64中的每一个的角度传感器82、84可以经定位和经配置确定主整平器板62和延长整平器板64的铺路角度。在各种示例中,角度传感器82、84可以直接连接到整平器板62、64本身,或者角度传感器82、84可以位于与整平器板62、64保持平行平面的相邻整平器结构上。在一些示例中,角度传感器82、84可以包括与整平器板62、64中的每一个相关联的一个或多个致动器66中的位置传感器。如下所述,一个或多个致动器66可以包括液压缸或电动致动器,并且传感器82、84可以结合到致动器66中,使得控制器48可以基于液压缸或电动致动器的位置确定整平器板62、64的角度。
26.角度传感器82、84可以连接到机器控制器48(图1)。因此,控制器48可以在任何给定时间知道任何整平器板62、64的角度。控制器48经配置从角度传感器82、84接收主整平器板62和延长整平器板64的铺路角度,并确定铺路角度是否处于适当或最佳位置。控制器可以包括用于整平器板62、64的适当的铺路角度的数据库,该数据库基于过去历史考虑到铺路深度、铺路宽度、材料流动和其它因素。因此,通过铺路工业中的最佳实践来确定适当的铺路角度。
27.在一个实施例中,控制器48可以自动改变铺路角度或警告操作员改变铺路角度。主整平器板62和延长整平器板64中的每一个的铺路角度可以彼此独立地改变。因此,如果延长整平器板64需要根据控制器48进行调节,延长整平器板64可以改变铺路角度而不改变主整平器板62的铺路角度。当然,如果需要,所有整平器板62、64的铺路角度可以同时且彼此类似地调节。
28.在该示例中,主整平器板62和延长整平器板64中的每一个的铺路角度位置可以由一个或多个致动器66控制。因此,主整平器板62和延长整平器板64中的每一个都可以由一个或多个致动器66控制,致动器66经定位彼此独立地升高和降低主整平器板62和延长整平器板64的部分,使得主整平器板62和延长整平器板64可以具有不同的铺路角度。
29.在各种示例中,致动器66可以包括液压缸以升高和降低主整平器板62和延长整平器板64的部分。或者,致动器66可以包括电动线性致动器或其它机构,以升高和降低主整平
器板62和延长整平器板64的部分。致动器66可以连接到控制器48,以允许控制器自动改变整平器板62、64的铺路角度。在一个示例中,致动器66可以包括通过使用集成致动器系统或操作员使用的机械工具控制的手动致动机构。
30.因此,本系统使用角度传感器82、84来最小化不良铺路实践。在主整平器板62和延长整平器板64上使用角度传感器82、84可以允许系统知道每个整平器板62、64的姿态和铺路角度。这些传感器82、84可以在设定和铺路操作期间使用。在铺路期间,传感器82、84可以判断延长整平器板64和主整平器板62是否比应用的最佳状态运行得太陡或太浅。整平器板的调节可以通过控制器48中的软件自动进行,或者由操作员手动进行,以允许整平器16在最佳范围内操作。依靠关于整平器板62、64的最佳设定和性能的历史信息导致控制用于适当设定的软件和/或数字读出。
31.在设定场地中,如果整平器板62、64经设定不是最佳的角度,则该信息可以被发送到控制器,并且控制器48可以基于历史铺路信息防止铺路机10移动,直到整平器板62、64被置于最佳位置。
32.工业实用性
33.本系统适用于铺路系统。本系统允许铺路机的整平器总是处于适当的攻角。具体地,该系统允许整平器的主整平器板和延长整平器板都被独立地控制,从而基于历史铺路数据和铺路实践,考虑到包括铺路深度、铺路宽度、材料馈送、机器速度和其它因素的一个或多个因素,整平器处于适合于特定铺路情况的铺路角度。
34.参照图4,在一个示例中,设定和调节整平器的攻角的方法(70)可以包括:测量主整平器板和延长整平器板中的每一个的铺路角度(72);以及彼此独立地改变主整平器板和延长整平器板的铺路角度(74),以达到主整平器板和延长整平器板中的每一个的适当的铺路角度。
35.如上所述,适当的铺路角度可以由控制器部分地基于铺路深度和铺路宽度以及存储在控制器中的历史铺路信息来确定。
36.铺路角度的改变可以由控制器自动进行,或者控制器可以通知操作员手动改变主整平器板和延长整平器板的铺路角度。
37.因此,在整平器上使用角度传感器有助于使不良铺路实践最小化。在主整平器板和延长整平器板上使用角度传感器将允许系统知道铺路角度。角度传感器可以在铺路和设定期间使用。在设定场地中,如果整平器经设定不是最佳的角度,则这可以用于保持铺路机不启动直到整平器被置于最佳位置。
38.上面的详细描述是说明性的,而不是限制性的。因此,本发明的范围应参考所附权利要求以及这些权利要求所授权的等同物的全部范围来确定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1