一种道路修复一体机的制作方法
1.本发明属于公路养护领域,具体涉及一种道路修复机,特别涉及一种道路修复一体机。
背景技术:
2.公路养护是为防治路面破损,使路面保持良好的技术状况而采取的技术措施,通常称为公路路面养护,公路路面养护包括粒料路面养护、沥青(渣油)路面养护和水泥混凝土路面养护,公路在使用过程中,路面由于行驶车辆的碾压、冲击、磨耗以及天气变化等影响,往往产生缺陷和损坏,这些缺陷和损坏统称为路面破损。路面破损对车辆的行驶速度、载重能力、燃料消耗、机械磨损、行车舒适,以及对交通安全、环境保护等都会造成有害影响。
3.现有技术中,在进行公路养护时,需要损坏路面进行修复,对路面修复需要使用道路修复机,现有的道理修复机在使用时,需要工作人员站立于路锥收放机上,手动将路锥放置或投置于路锥座上,再通过路锥座对路锥进行摆放,在回收路锥时,需要工作人员将路锥从路锥座上取下,摆放于拖车上便于下次使用,通过人工放置路锥和回收路锥的方式效率较低,工作人员劳动强度较大,同时,在拖车行进过程中站立放置或回收路锥具有较大的安全隐患,且现有的道路修复机大多为分体式,修复路面效率较低,因此,如何克服上述存在的技术问题和缺陷成为重点需要解决的问题。
技术实现要素:
4.为了克服现有技术的不足,现提供一种道路修复一体机,可以有效解决现有技术中人工放置路锥和回收路锥效率较低、工作人员劳动强度较大、拖车行进过程中站立放置或回收路锥安全隐患较大、道路修复机修复路面效率较低等问题。
5.为实现上述目的,本发明的技术方案是:一种道路修复一体机,包括拖车、物料混合机、机械手和废料清理机,所述物料混合机设置于拖车上,所述机械手设置于拖车侧部,所述废料清理机设置于物料混合机后侧的拖车上,还包括路锥收放机,所述路锥收放机设置于废料清理机后侧的拖车上。
6.进一步地,所述物料混合机包括储料仓、混合总成和出料仓,所述储料仓设置于混合总成上方,所述出料仓设置于混合总成侧部,所述混合总成包括支撑箱体、下料槽、送料槽、螺旋送料桨、搅拌仓和搅拌桨,所述下料槽设置于支撑箱体上,所述送料槽设置于下料槽底部,所述送料槽内部设置有螺旋送料桨,所述送料槽连接搅拌仓,所述搅拌仓设置于支撑箱体中部,所述搅拌仓内部设置有搅拌桨,所述搅拌仓连接出料仓,所述出料仓侧部设置有出料口,所述出料仓内部设置有称重台,所述出料口处连接有出料软管。
7.进一步地,所述路锥收放机包括路锥、底板、路锥摆放机构、路锥调整机构、支撑位移机构和抓取位移机构,所述路锥摆放于底板上方中部,所述支撑位移机构设置于底板上方,所述抓取位移机构设置于支撑位移机构上,所述底板上设置有限位挡板,所述底板上还
设置有锥形摆放座,所述路锥叠放于锥形摆放座上。
8.进一步地,所述路锥摆放机构包括连接立柱a、支撑横杆、铰接杆和斜向伸缩杆,所述连接立柱a固定设置于底板侧部,所述支撑横杆垂直设置于连接立柱a底端侧部,所述铰接杆铰接设置于支撑横杆右端,所述连接立柱a和铰接杆之间通过斜向伸缩杆连接,所述铰接杆上还设置有路锥座。
9.进一步地,所述路锥调整机构包括连接立柱b、路锥挡杆和导向板,所述路锥挡杆通过连接立柱b设置于底板侧部,所述导向板对称设置于路锥挡杆下方的连接立柱b上。
10.进一步地,所述支撑位移机构包括支撑柱、限位滑轨、行走电机、行走齿轮和滑动件,所述支撑柱设置于底板上,所述限位滑轨设置于支撑柱顶部,所述限位滑轨内部滑动设置有滑动件,所述滑动件上设置有行走电机,所述行走齿轮设置于行走电机的转轴上,所述限位滑轨侧部设置有行走齿轨,所述行走齿轮啮合连接行走齿轨,所述限位滑轨两端设置有端板,所述行走齿轨和限位滑轨连接处设置有加强筋。
11.进一步地,所述抓取位移机构包括行走轨、螺纹杆、滑动板、位移电机、抓取伸缩杆和路锥爪,所述行走轨对称设置于滑动件上,所述螺纹杆设置于行走轨中部的滑动件上,所述滑动板滑动设置于行走轨上,所述位移电机设置于滑动件上,所述抓取伸缩杆对称并贯穿垂直固定设置于位移电机两侧的滑动件上,所述路锥爪设置于抓取伸缩杆的下端。
12.进一步地,所述行走轨为柱状行走轨,所述滑动板包括滑动套和固位板,所述滑动套滑动设置于行走轨上,所述固位板设置于滑动套侧部,所述位移电机的转轴上设置有传动齿轮,所述螺纹杆上螺纹连接有螺纹套,所述螺纹套上固定设置有被动齿轮,所述固位板上开有供被动齿轮转动的矩形孔,所述螺纹套和被动齿轮转动卡接于固位板的矩形孔内。
13.进一步地,所述路锥爪包括铰接座、定位爪、调节环和调节伸缩杆,所述定位爪铰接设置于铰接座底部,所述定位爪中部开有调节孔,所述调节环通过调节孔滑动设置于定位爪上,所述调节环通过调节伸缩杆连接铰接座。
14.本发明的一种道路修复一体机的有益效果:1.本发明的道路修复一体机,具有路锥收放机,通过路锥收放机的抓取位移机构的抓取伸缩杆运行可带动路锥爪上下运动,路锥爪的调节伸缩杆运行可带动调节环上下移动,调节环上下移动可带动定位爪对路锥进行抓取,路锥爪将路锥进行固定后,通过抓取伸缩杆运行将叠放的路锥分开,启动位移电机,位移电机运行带动传动齿轮转动,传动齿轮转动啮合传动被动齿轮和螺纹套,螺纹套和螺纹杆配合可推动滑动板沿行走轨滑动,当路锥跟随滑动板滑动至与路锥座对应位置后,停止位移电机运行,启动行走电机,行走电机运行带动行走齿轮转动,行走齿轮转动配合行走齿轨可带动抓取位移机构横向移动,当路锥移动至路锥座正上方时,停止行走电机运行,同时启动调节伸缩杆,调节伸缩杆缩短带动调节环上升,调节环上升同时将定位爪撑开,撑开后路锥落至路锥座上,启动斜向伸缩杆,斜向伸缩杆伸长带动铰接杆倾斜,铰接杆倾斜同时路锥从路锥座滑落至地面,路锥滑落至地面同时拖车行进带动路锥挡杆运动,路锥挡杆运动可将倾倒的路锥推至直立状态,同时导向板可对直立的路锥位置进行调整,从而完成路锥的摆放,本装置的道路修复一体机可通过路锥收放机实现自动放置、收纳路锥,放置收纳路锥效率较高,通过抓取位移机构和支撑位移机构可在放置路锥时实现自动将路锥摆放至路锥座,在回收路锥时自动将路锥座上的路锥收回摆放,有效降低工作人员的劳动强度,同时降低工作人员的安全隐患。
15.2.本发明的道路修复一体机,还具有物料混合机、机械手和废料清理机,通过机械手上设置的相机定位来识别破损最大尺寸,使用机械手抓取废料清理机对破损部位进行环切,在切割的同时,物料混合机将相应面积数据输入程序中,各种物料按照顺序进行出料,物料混合机将物料进行配比融合,出料时物料进行称重,融合同时,废料清理机切割完全后,使用机械手将清理出的废料残渣进行回收破碎,清理干净后,使用机械手夹持物料混合机的出料软管将混合后的物料投放至相应破损部位,最后对路面进行压实,再由路锥收放机构进行路锥回收,本装置通过物料混合机、机械手和废料清理机配合,可省去大量人工,且安全可靠,修复效率较高,使用方便。
附图说明
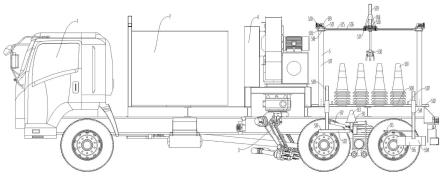
16.图1是本发明的道路修复一体机的侧视结构示意图;图2是本发明的道路修复一体机的俯视结构示意图;图3是本发明的道路修复一体机路锥收放机的侧视结构剖视示意图;图4是本发明的道路修复一体机支撑位移机构的侧视结构剖视放大示意图;图5是本发明的道路修复一体机抓取位移机构的侧视结构剖视放大示意图;图6是本发明的道路修复一体机路锥收放机的俯视结构示意图;图7是本发明的道路修复一体机路锥爪的侧视结构剖视放大示意图;图8是本发明的道路修复一体机物料混合机的侧视结构剖视放大示意图。
17.图中:1-拖车;2-物料混合机,201-储料仓,202-混合总成,203-出料仓,204-支撑箱体,205-下料槽,206-送料槽,207-螺旋送料桨,208-搅拌仓,209-搅拌桨,210-出料口,211-出料软管;3-机械手;4-废料清理机;5-路锥收放机;501-路锥,502-底板,503-路锥摆放机构,504-路锥调整机构,505-支撑位移机构,506-抓取位移机构,507-限位挡板,508-锥形摆放座,509-连接立柱a,510-支撑横杆,511-铰接杆,512-斜向伸缩杆,513-路锥座,514-连接立柱b,515-路锥挡杆,516-导向板,517-支撑柱,518-限位滑轨,519-行走电机,520-行走齿轮,521-滑动件,522-行走齿轨,523-端板,524-加强筋,525-行走轨,526-螺纹杆,527-滑动板,528-位移电机,529-抓取伸缩杆,530-路锥爪,531-滑动套,532-固位板,533-传动齿轮,534-螺纹套,535-被动齿轮,536-铰接座,537-定位爪,538-调节环,539-调节伸缩杆,540-调节孔。
具体实施方式
18.下面结合附图并通过具体的实施方式对本发明的一种道路修复一体机做更加详细的描述。
19.在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、
ꢀ“
顶”、“底”、“内”、
ꢀ“
外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
20.参见图1、图2,一种道路修复一体机,包括拖车1、物料混合机2、机械手3和废料清理机4,本发明的道路修复一体机,具有路锥收放机,可通过路锥收放机实现自动放置、收纳路锥,放置收纳路锥效率较高,通过抓取位移机构和支撑位移机构可在放置路锥时实现自动将路锥摆放至路锥座,在回收路锥时自动将路锥座上的路锥收回摆放,有效降低工作人员的劳动强度,同时降低工作人员的安全隐患,还具有物料混合机、机械手和废料清理机,通过机械手上设置的相机定位来识别破损最大尺寸,使用机械手抓取废料清理机对破损部位进行环切,在切割的同时,物料混合机将相应面积数据输入程序中,各种物料按照顺序进行出料,物料混合机对物料进行配比融合,融合后出料同时对物料进行称重,废料清理机切割完全后,使用机械手将清理出的废料残渣进行回收破碎,清理干净后,使用机械手夹持物料混合机的出料软管将混合后的物料投放至相应破损部位,最后对路面进行压实,再由路锥收放机构进行路锥回收,本装置通过物料混合机、机械手和废料清理机配合,可省去大量人工,且安全可靠,修复效率较高,使用方便,所述物料混合机2设置于拖车1上,所述物料混合机内部设置有称重台,所述机械手3设置于拖车1侧部,所述机械手上设置有相机,通过相机可定位识别路面破损位置,所述废料清理机4设置于物料混合机2后侧的拖车1上,所述废料清理机包括破碎风机和切割机,切割机用于对破损路面进行切割,破碎风机用于清理切割后的废料,还包括路锥收放机5,所述路锥收放机5设置于废料清理机4后侧的拖车1上。
21.参见图2、图8,所述物料混合机包括储料仓201、混合总成202和出料仓203,所述储料仓201设置于混合总成202上方,储料仓用于储存物料,所述出料仓203设置于混合总成202侧部,所述混合总成202包括支撑箱体204、下料槽205、送料槽206、螺旋送料桨207、搅拌仓208和搅拌桨209,所述下料槽205设置于支撑箱体204上,下料槽便于储料仓下料,所述送料槽206设置于下料槽205底部,所述送料槽206内部设置有螺旋送料桨207,螺旋送料桨用于向搅拌仓输送物料,所述送料槽206连接搅拌仓208,所述搅拌仓208设置于支撑箱体204中部,所述搅拌仓208内部设置有搅拌桨209,搅拌桨用于搅拌物料,使物料在搅拌仓内充分融合,所述搅拌仓208连接出料仓203,所述出料仓203侧部设置有出料口210,所述出料仓203内部设置有称重台,物料融合后出料同时通过称重台称重从而可精准出料,所述出料口210处连接有出料软管211,便于向需要修复的路面处下料。
22.参见图1、图2,所述路锥收放机5包括路锥501、底板502、路锥摆放机构503、路锥调整机构504、支撑位移机构505和抓取位移机构506,所述路锥501摆放于底板502上方中部,所述支撑位移机构505设置于底板502上方,所述抓取位移机构506设置于支撑位移机构505上,所述底板502上设置有限位挡板507,限位挡板用于对路锥摆放位置进行限定,所述底板502上还设置有锥形摆放座508,所述路锥501叠放于锥形摆放座508上,锥形摆放座用于叠放路锥。
23.参见图1、图2,所述路锥摆放机构503包括连接立柱a509、支撑横杆510、铰接杆511和斜向伸缩杆512,所述连接立柱a509固定设置于底板502侧部,所述支撑横杆510垂直设置于连接立柱a509底端侧部,所述铰接杆511铰接设置于支撑横杆510右端,所述连接立柱a509和铰接杆511之间通过斜向伸缩杆512连接,所述铰接杆511上还设置有路锥座513,斜向伸缩杆用于驱动铰接杆使铰接杆改变角度,防止路锥,参见图1、图2,所述路锥调整机构504包括连接立柱b514、路锥挡杆515和导向板516,所述路锥挡杆515通过连接立柱b514设置于底板502侧部,路锥挡杆用于挡住路锥底部,使路锥在阻力作用下直立,所述导向板516
对称设置于路锥挡杆515下方的连接立柱b514上,导向板用于调整路锥直立时的位置。
24.参见图3、图4、图6,所述支撑位移机构505包括支撑柱517、限位滑轨518、行走电机519、行走齿轮520和滑动件521,参见图1,所述支撑柱517设置于底板502上,所述限位滑轨518设置于支撑柱517顶部,参见图3、图4,所述限位滑轨518内部滑动设置有滑动件521,所述滑动件521上设置有行走电机519,所述行走齿轮520设置于行走电机519的转轴上,所述限位滑轨518侧部设置有行走齿轨522,所述行走齿轮520啮合连接行走齿轨522,通过行走电机运行可带动行走齿轮转动,行走齿轮转动啮合行走齿轨可带动滑动件行进,所述限位滑轨518两端设置有端板523,所述行走齿轨522和限位滑轨518连接处设置有加强筋524,加强行走齿轨的强度。
25.参见图1、图,3、图5、图6,所述抓取位移机构506包括行走轨525、螺纹杆526、滑动板527、位移电机528、抓取伸缩杆529和路锥爪530,参见图5、图6,所述行走轨525对称设置于滑动件521上,所述螺纹杆526设置于行走轨525中部的滑动件521上,行走轨用于限制滑动板的滑动位置,所述滑动板527滑动设置于行走轨525上,所述位移电机528设置于滑动件521上,所述抓取伸缩杆529对称并贯穿垂直固定设置于位移电机528两侧的滑动件521上,所述路锥爪530设置于抓取伸缩杆529的下端,路锥爪用于抓取路锥。
26.参见图7,所述路锥爪530包括铰接座536、定位爪537、调节环538和调节伸缩杆539,所述定位爪537铰接设置于铰接座536底部,所述定位爪537中部开有调节孔540,所述调节环538通过调节孔540滑动设置于定位爪537上,所述调节环538通过调节伸缩杆539连接铰接座536,通过调节调节环的高度可配合调节孔控制定位爪的张合角度。
27.参见图6,所述行走轨525为柱状行走轨525,所述滑动板527包括滑动套531和固位板532,所述滑动套531滑动设置于行走轨525上,所述固位板532设置于滑动套531侧部,参见图5,所述位移电机528的转轴上设置有传动齿轮533,所述螺纹杆526上螺纹连接有螺纹套534,所述螺纹套534上固定设置有被动齿轮535,所述固位板532上开有供被动齿轮535转动的矩形孔,所述螺纹套534和被动齿轮535转动卡接于固位板532的矩形孔内,位移电机运行即可带动传动齿轮转动,传动齿轮转动啮合传动被动齿轮和螺纹套,螺纹套和螺纹杆配合可推动滑动板沿行走轨滑动。
28.本装置的道路修复一体机的使用方法:本装置在使用时,启动路锥收放机,路锥收放机的抓取位移机构的抓取伸缩杆运行带动路锥爪上下运动,路锥爪的调节伸缩杆运行可带动调节环上下移动,调节环上下移动带动定位爪对路锥进行抓取,路锥爪将路锥进行固定后,通过抓取伸缩杆运行将叠放的路锥分开,启动位移电机,位移电机运行带动传动齿轮转动,传动齿轮转动啮合传动被动齿轮和螺纹套,螺纹套和螺纹杆配合可推动滑动板沿行走轨滑动,当路锥跟随滑动板滑动至与路锥座对应位置后,停止位移电机运行,启动行走电机,行走电机运行带动行走齿轮转动,行走齿轮转动配合行走齿轨可带动抓取位移机构横向移动,当路锥移动至路锥座正上方时,停止行走电机运行,同时启动调节伸缩杆,调节伸缩杆缩短带动调节环上升,调节环上升同时将定位爪撑开,撑开后路锥落至路锥座上,启动斜向伸缩杆,斜向伸缩杆伸长带动铰接杆倾斜,铰接杆倾斜同时路锥从路锥座滑落至地面,路锥滑落至地面同时拖车行进带动路锥挡杆运动,路锥挡杆运动可将倾倒的路锥推至直立状态,同时导向板可对直立的路锥位置进行调整,从而完成路锥的摆放,路锥摆放完成后,通过机械手上设置的相机定位来
识别路面破损最大尺寸,使用机械手抓取废料清理机的切割机对破损部位进行环切,在切割的同时,物料混合机将相应面积数据输入程序中,各种物料按照顺序进行出料,物料混合机有出料同时通过其内部的称重台对物料进行称重,进行配比融合,融合同时,废料清理机切割完全后,使用机械手将夹取破碎风机的回收管道将清理出的废料残渣进行回收破碎,清理干净后,使用机械手夹持物料混合机的出料软管将混合后的物料投放至相应破损部位,最后对路面进行压实,再由路锥收放机构进行路锥回收。
29.除非另作定义,此处使用的技术术语或者科学术语应当为本发明所属领域内具有一般技能的人士所理解的通常意义。本技术说明书以及权利要求书中如使用“一个”或者“一”等类似词语也不必然表示数量限制。“包括”或者“包含”等类似的词语意指出现该词前面的元件或物件涵盖出现在该词后面列举的元件或者物件及其等同,而不排除其他元件或者物件。“连接”或者“相连”等类似词语并非限定于物理的或者机械的连接,而是可以包括电性的连接,不管是直接的还是间接的。
30.上文中参照优选的实施例详细描述了本发明的示范性实施方式,然而本领域技术人员可理解的是,在不背离本发明理念的前提下,可以对上述具体实施例做出多种变型和改型,且可以对本发明提出的各技术特征、结构进行多种组合,而不超出本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1