自推进式机械的制作方法
1.本实用新型涉及一种自推进式建筑机械或采矿机械,特别是铣刨机,用于对地面表面进行作业,包括:
[0002]-机械框架;
[0003]-作业装置,用于对地面表面进行作业,作业装置支撑在所述机械框架上,其中所述作业装置至少部分地被壳体包围;
[0004]-至少一个可移动侧板,其在所述作业装置的两侧中的至少一侧上关闭所述壳体,其中所述可移动侧板在所述作业操作期间以浮动位置搁置在所述地面表面上。
背景技术:
[0005]
建筑机械或采矿机械,特别是铣刨机,例如用于对地面表面进行作业的露天采矿机、道路铣刨机或再生机是已知的,其包括机械框架。作业装置,特别是用于对地面表面进行作业的铣刨滚筒,通常设置在所述机械框架上。作业装置支撑在机械框架上,其中作业装置至少部分地由壳体包围。此外,经常设置至少一个可移动侧板,其在作业装置两侧中的至少一侧上关闭壳体,其中可移动侧板在作业操作期间以浮动位置搁置在地面表面上。
[0006]
在自推进式建筑机械或采矿机械中,特别是在露天采矿机中,通过作业装置被作业的地面路面经常不装载在运输车辆上,而是保留在地面表面的作业区域上。原则上,可以是下述情况,这种机械可以包括作为作业装置的铣刨滚筒和由运输输送机构成的物料输送装置,该物料输送装置可以用于装载被作业的地面路面。
[0007]
然而,还存在这样的机械,其包括作为作业装置的铣刨滚筒,并且不经由运输输送机移除被铣刨掉的物料,而是将物料留在地面表面的作业区域上以供稍后移除或进一步处理。在这种操作中,围绕作业装置的壳体在铣刨滚筒后面的区段中没有向下关闭到地面表面,而是被作业的物料可以离开铣刨滚筒后面的壳体并在作业之后保留在地面表面上。当建筑机械或采矿机械在第一铣刨切口旁边铣刨第二铣刨切口时,经常存在这样的问题,即至少一个可移动侧板搁置在先前被铣刨掉的地面物料上而不是搁置在已经作业的地面表面的区域上。可移动侧板既不搁置在已作业的区域上,也不搁置在仍待作业的区域上。由于铣刨深度经常通过可移动侧板来确定,因此这可能导致不准确。
[0008]
这种缺点既出现在没有配备物料输送装置(例如像运输输送机)的机械中,也出现在原则上有这种输送装置但不用于当前作业任务的机械中。
技术实现要素:
[0009]
因此,本实用新型的目的是提出一种用于对地面表面进行作业的自推进建筑机械或采矿机械,特别是铣刨机,其中可以更精确地对地面表面进行作业。
[0010]
上述目的以下特征来实现。
[0011]
本发明提供一种的自推进式建筑机械或采矿机械,特别是铣刨机,用于对地面表面进行作业,包括:
[0012]-机械框架;
[0013]-作业装置,用于对地面表面进行作业,作业装置支撑在所述机械框架上,其中所述作业装置至少部分地被壳体包围;
[0014]-至少一个可移动侧板,其在所述作业装置的两侧中的至少一侧上关闭所述壳体,其中所述可移动侧板在所述作业操作期间以浮动位置搁置在所述地面表面上;
[0015]
本实用新型有利地规定,在行进方向上看,清除元件布置在至少一个可移动侧板的前方,其中该清除元件包括至少一个清除边缘,通过该至少一个清除边缘,清除元件能够穿透位于可移动侧板前方的地面表面上的地面物料,并且为可移动侧板清除地面物料,使得可移动侧板可以搁置在地面表面上。
[0016]
铣刨机,例如可以是露天采矿机、道路铣刨机或再生机。
[0017]
本实用新型具有的优点在于,通过提供附加的清除元件,可移动侧板前面的区域被清除并且可移动侧板可以搁置在地面表面上。以这种方式,可以更精确地确定铣刨深度。
[0018]
清除元件可以围绕枢转轴枢转,其中枢转轴优选地基本上正交于行进方向延伸。
[0019]
作业装置例如可以是铣刨滚筒。铣刨滚筒可以有铣刨滚筒轴,所述铣刨滚筒轴支撑在机械框架上。枢转轴可以优选地平行于铣刨滚筒轴布置。
[0020]
在操作位置,枢转轴能够相对于清除边缘水平地和/或竖直地偏移。
[0021]
清除元件能够具有收起位置以及操作位置。
[0022]
根据本实用新型,处于操作位置是指清除元件能够穿透可移动侧板前方的待清除的地面物料,或者处于地面作业机械的行进装置所搁置的地面表面的水平处。当其不处于操作位置时,清除元件也可以枢转到枢转入位置。该位置也可以被称为收起位置或运输位置。在收起位置,清除元件以这样的方式枢转入,即,清除元件相对于地面作业机械的行进装置不向下突出,或者不在地面作业机械的行进装置所搁置的地面表面的水平上。特别地,清除元件在地面表面上方,并且因此当处于收起位置时不与地面表面接触。因此,在收起位置中,清除元件不能穿透位于可移动侧板前方的地面表面上的地面物料。
[0023]
在操作位置,从行进方向上看,枢转轴可以布置在清除边缘的前方。
[0024]
至少当清除元件处于操作位置时,枢转轴可以比清除边缘更远离地面表面。
[0025]
在行进方向上,清除边缘能够至少在第一清除边缘区段中具有第一轮廓,该第一轮廓在操作位置中在地面表面的方向上是弯曲的。
[0026]
由于第一清除边缘区段的轮廓,因穿透地面物料而作用在第一清除边缘区段上的力,能够以使得清除边缘更深地掘入地面物料内的方式被定向。因此,定向力作用在地面物料的方向上。
[0027]
在与行进方向相反的方向上,清除边缘能够至少在第二清除边缘区段具有这样的轮廓,该轮廓在操作位置中在地面表面的方向上是弯曲的。
[0028]
第二清除边缘区段中的轮廓可以以使得清除元件朝向自由端逐渐变细(taper)的方式成形。
[0029]
因在操作位置穿透地面物料而作用在第二清除边缘区段上的力能够通过第二清除边缘区段的轮廓以这样的方式被定向,即,使得该力向上作用,即远离地面路面,并且因此将清除元件向上推出地面物料。
[0030]
第二清除边缘区段优选地布置在清除边缘元件的自由端的区域中。其结果是,尤
其是当清除边缘元件在下部区域中遇到坚实地面表面时,源自所述地面表面的所述力作用在第二清除边缘区段上,并且由于第二清除边缘区段的特殊轮廓,力以将清除边缘元件推出地面物料的方式被定向。
[0031]
出于本实用新型的目的,“向上(upwards)”是指在远离地面表面向上作用的方向上。出于本实用新型的目的,“向下(downwards)”是指在地面表面的方向上。
[0032]
第一清除边缘区段可以布置在第二清除边缘区段上方。
[0033]
可移动侧板搁置在其上的地面表面可以是地面表面先前被铣刨的区域,并且清除元件穿透的地面物料可以是位于地面表面上的先前被铣刨的地面物料。
[0034]
然而,地面物料也可以替代地是仅作为松散地面物料位于地面表面上的地面物料。
[0035]
在操作位置中,清除元件的重心可以相对于枢转轴以这样的方式布置,即,使得清除元件的自重在地面表面的方向上推动清除元件。
[0036]
第一清除边缘区段的轮廓可以这样的方式成形,即,使得在操作位置,因穿透地面物料而作用在第一清除边缘区段上的力以这样的方式被定向,使得力的至少一部分在地面表面的方向上推动清除元件。
[0037]
如上面已经解释的那样,结果可能是清除元件被进一步推入地面物料中,并且因此部分地掘入地面物料中。
[0038]
可以提供致动器元件,该致动器元件可以将清除元件从操作位置转移到收起位置内。从收起位置到操作位置内的调整可以在不施加额外的力的情况下实现,例如,仅通过作用在清除元件上的重力。然而,清除元件从收起位置到操作位置内的调整也可以由致动器元件实现或由致动器元件支撑。
[0039]
特别地,可以提供致动器元件,该致动器元件可以使清除元件枢转。致动器元件可以将清除元件从操作位置枢转到收起位置内。在这种情况下,致动器元件以这样的方式将力施加到清除元件,使得力使清除元件远离地面路面枢转。
[0040]
致动器元件可以是液压缸或气压缸。
[0041]
致动器元件还可以用于在操作位置向清除元件施加额外的力,其中该力在地面表面的方向上推动清除元件。然后,致动器元件还可以执行清除元件从收起位置到操作位置内的调整或支撑清除元件。
[0042]
一旦由于穿透地面而在操作位置中作用在清除边缘上的力的水平和/ 或竖直部分大于由于自重和/或致动器元件而施加在清除元件上的力,清除元件就以这样的方式围绕枢转轴枢转,使得清除元件远离地面路面移动。
[0043]
由于枢转轴相对于清除边缘的偏移布置,力的水平部分也可有助于使清除元件枢转。
[0044]
例如,在清除元件遇到地面路面中的坚硬障碍物时就会发生这种情况。在这种情况下,力的水平和/或竖直部分足够大,以使清除元件以其远离地面路面移动的方式枢转。
[0045]
第二清除边缘区段的轮廓可以这样的方式成形,即,使得在操作位置,因穿透地面物料而作用在第二清除边缘区段上的力以这样的方式被定向,使得力的至少一部分使清除元件枢转并使其远离地面表面移动。
[0046]
自重和/或致动器元件的力,和/或第一清除边缘区段和/或第二清除边缘区段的
轮廓可以以这样的方式选择,即,使得清除元件可以穿透具有的密度低于预定密度的地面物料。
[0047]
因此,清除元件和/或致动器元件,和/或第一清除边缘区段或第二清除边缘区段的轮廓可以以这样的方式选择,即,使得例如松散物料被清除元件清除掉,其中清除元件不会穿透更多的坚实物料。
[0048]
例如,可以进行比较测试,对通常由这种自推进式建筑机械或采矿机械(例如像露天采矿机)作业的特定物料和物料的不同密度进行测试。在该过程中,通过正确选择自重和/或致动器元件的力和/或第一清除边缘元件和/或第二清除边缘元件的轮廓,可以分别为每个单个建筑机械或采矿机械单独选择清除元件仍然可以穿透哪种类型的物料或哪种密度的物料,以及清除元件不能穿透哪种类型的物料或哪种密度的物料。这可以通过比较测试来建立,并相应地针对特定型号系列的地面作业机械进行调整。
[0049]
致动器元件的力也可以是可调整的,使得在现有的地面作业装置中,可以分别调整清除元件仍然可以穿透哪种物料或哪种密度的物料,以及清除元件不能穿透哪种物料或哪种密度的物料。
[0050]
清除元件可以布置在建筑机械或采矿机械的行进装置上。
[0051]
行进装置例如可以是建筑机械或采矿机械的履带式地面接合单元或轮子。
[0052]
建筑机械或采矿机械还可以包括至少两个清除元件,其中一个清除元件设置在机械的每一侧上,即,在每个侧板的前方。然后,清除元件可以根据需要单独地在建筑机械或采矿机械的两侧中的每一侧上枢转到操作位置或收起位置内。
[0053]“处于浮动位置”是指可移动侧板由于自重或施加的轻微压力分别遵循可移动侧板所搁置在其上的地面表面或地面物料的轮廓,以便朝向外部屏蔽壳体。
[0054]
当可移动侧板在作业操作期间以浮动位置搁置在地面表面上时,作业装置可以对地面表面进行作业。
附图说明
[0055]
在以下,参照附图更详细地解释本实用新型的一个实施例。
[0056]
以下示意性地示出:
[0057]
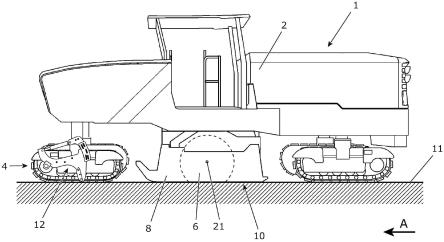
图1是自推进式建筑机械或采矿机械;
[0058]
图2是根据本实用新型的清除元件;
[0059]
图3是清除元件穿透地面物料的示意图;以及
[0060]
图4是可移动侧板的示意图。
具体实施方式
[0061]
图1示出了自推进式建筑机械或采矿机械1。自推进式建筑机械或采矿机械1例如可以是露天采矿机。自推进式建筑机械或采矿机械1优选地包括机械框架2。作业装置可以布置在机械框架2上。作业装置6可以优选地是铣刨滚筒。作业装置6至少部分地由壳体10包围。设置至少一个可移动侧板8,其从作业装置6的两侧中的至少一侧关闭壳体10,其中可移动侧板8在作业操作期间以浮动位置搁置在地面表面11上。
[0062]“处于浮动位置”是指可移动侧板8由于自重或由未示出的调整装置施加的轻微压
力而分别地遵循可移动侧板8所搁置在其上的地面表面或地面物料的轮廓,以便朝向外部屏蔽壳体10。
[0063]
在本实施例中,根据本实用新型的清除元件12布置在自行进方向a 上看可移动侧板8的前方的行进装置4中的一个上。
[0064]
在图2中更详细地描绘了清除元件。自行进方向a上看,清除元件12 布置在至少一个可移动侧板8的前方,其中清除元件12包括至少一个清除边缘14,清除元件12可以通过该清除边缘14穿透位于可移动侧板前方的地面表面上的地面物料16,并且为可移动侧板8清除地面物料16,使得可移动侧板8可以搁置在地面表面11上。清除元件12可以围绕枢转轴18枢转,其中枢转轴18优选地基本上正交于行进方向a延伸。假如作业装置6 是铣刨滚筒,则铣刨滚筒6可以具有铣刨滚筒轴21,铣刨滚筒轴21被支撑在机械框架2上。枢转轴18优选地平行于铣刨滚筒轴21布置。
[0065]
在操作位置,枢转轴18相对于清除边缘14水平地和/或竖直地偏移。在本实施例中,正如在行进方向a上看去,枢转轴18布置在清除边缘14 的前方。此外,在本实施例中,枢转轴18布置在清除边缘14上方。在本实用新型中,“在清除边缘上方”是指在远离地面表面的方向上。在本图中,清除元件12被描绘为处于操作位置。“处于操作位置”是指清除元件12穿透地面物料16。当清除元件12相对于行进装置4向下突出或搁置在行进装置所搁置在其上的地面表面上时,情况总是这样。
[0066]
清除元件12的重心s在图2中描绘出。清除元件12的重心s相对于枢转轴18以这样的方式布置,即,使得清除元件12的自重向地面路面的方向上推动。
[0067]
优选地,还提供致动器元件19,其在操作位置向清除元件12施加附加力,其中该力在地面表面的方向上推动清除元件12。致动器元件19例如可以是液压缸或气压缸。致动器元件19还可以用于将清除元件枢转到收起位置内。在收起位置中,清除元件12相对于行进装置的下边缘不向下突出。
[0068]
一旦因穿透地面而在操作位置作用在清除边缘14上的力的水平和/或竖直部分大于由于自重和/或致动器元件19而施加在清除元件12上的力,清除元件12就以这样的方式围绕枢转轴枢转,使得清除元件12远离地面表面11移动。
[0069]
这意味着,当清除元件遇到地面物料中的障碍物或者清除元件遇到坚实且致密的地面表面时,力的水平和/或竖直部分增加到使得清除元件12 远离地面路面枢转的程度。
[0070]
对于清除元件12而言还旨在以这样的方式相应地调整或选择,即,使得清除元件12尤其不穿透坚实物料,因为清除元件12旨在仅将松散物料清除到侧面并且不旨在穿透待铣刨的地面表面11。
[0071]
然而,另外,清除边缘14的轮廓也可以这样的方式成形,即,使得清除元件12一方面在穿透松散的地面物料时被支撑,并且另一方面在被枢转远离过分坚实的地面物料16时被支撑。
[0072]
在该设计中,设置成使得清除边缘14包括第一清除边缘区段20和第二清除边缘区段22。
[0073]
第一清除边缘区段20可以这样的方式成形,即,使得在操作位置,因穿透地面物料16而作用在第一清除边缘区段20上的力以这样的方式被定向,使得力的至少一部分在地面表面的方向上推动清除元件12。在所描绘的实施例中,在行进方向a上,清除边缘至少在第
一清除边缘区段20中具有这样的的轮廓,其在操作位置在地面表面的方向上是弯曲的。
[0074]
在与行进方向a相反的方向上,清除边缘14可以包括至少第二清除边缘区段22,第二清除边缘区段22具有这样的轮廓,其在操作位置中在地面表面的方向上是弯曲的。
[0075]
第二清除边缘区段22可以以使得清除元件12朝向自由端24逐渐变细的方式成形。
[0076]
清除边缘区段20优选地布置在第二清除边缘区段22上方,第二清除边缘区段22的轮廓可以这样的方式成形,即,使得在操作位置,因穿透地面物料16而作用在第二清除边缘区段22上的力以这样的方式被定向,使得力的至少一部分使清除元件12枢转并使其远离地面表面移动。
[0077]
因此,自重和/或致动器元件19的力,和/或第一清除边缘区段20和/ 或第二清除边缘区段22的轮廓可以以这样的方式选择,使得清除元件12 可以穿透地面物料16,地面物料16可以具有低于预定密度的密度。
[0078]
通过使用不同轮廓、不同自重和致动器力矩的力以及具有不同密度的不同物料的比较测试来测试第一清除边缘区段20和/或第二清除边缘区段 22的实际自重、致动器元件的力以及轮廓,然后相应地进行选择。
[0079]
如图所描绘的那样,清除元件12优选地布置在建筑机械或采矿机械的行进装置4上。
[0080]
图3中示出了示意图,其示意性地描绘了搁置在待铣刨的地面表面上的行进装置4,以及清除元件12。在所示的图中,如在行进方向a看去的,清除元件清除在可移动侧板8的前方的地面物料16。在该过程中,清除元件12不穿透地面表面11的区域11a,在该区域11a上方已经进行了铣刨。
[0081]
图4示意性地示出了位于地面表面的先前铣刨区域11a上的地面物料 16已经被清除的示例。在这种情况下,可移动侧板8可以搁置在地面表面 11的区域11a上,在该区域11a上方已经进行铣刨。因此,可以通过可移动侧板8来确定铣刨深度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1