一种施工现场管理机器人的制作方法
1.本实用新型涉及道路施工领域,尤其涉及一种施工现场管理机器人。
背景技术:
2.在高速公路进行现场作业施工时,为了尽可能地保障施工人员地安全,解决管理里程长、施工现场点位多、监控管理覆盖率较低的情况,会使用施工现场管理机器人来对每个施工现场进行管理,现有的施工现场管理机器人,由运动底座和一系列检测组件构成,除了对施工现场的人员进行安全施工检测之外,还能对来往车辆进行提示,但是现有的施工现场机器人,在夜间作业时,缺乏自身的照明设备,施工现场需要额外的光源照射,以保证夜间施工的进行。
3.因此,现在研发一种能够在夜间提供光源,并且能够调节照射方向和角度的施工现场管理机器人。
技术实现要素:
4.为了克服现有装置在夜间作业时,缺乏自身的照明设备的缺点,本实用新型的技术问题为:提供一种能够在夜间提供光源,并且能够调节照射方向和角度的施工现场管理机器人。
5.技术方案如下:一种施工现场管理机器人,包括有机座、机器人检测组件、移动轮、摆动杆和探照机构,机座顶部连接有机器人检测组件,机座底部转动式连接有四个移动轮,机座左右两部的上侧均转动式连接有摆动杆,机器人检测组件上设有用于提供夜间照明,便于人们夜间作业的探照机构。
6.可选地,探照机构包括有环状固定架、螺杆、调节螺母、阻挡块和探照灯,机器人检测组件上滑动并转动式连接有环状固定架,环状固定架前部螺纹式连接有螺杆,螺杆上螺纹式连接有调节螺母,环状固定架后部上侧连接有两个阻挡块,环状固定架后部上侧转动式连接有探照灯,通过转动调节螺母能够使得环状固定架不再夹紧,人们此时可以转动或者滑动环状固定架,从而对探照灯的照射方向和角度进行调整。
7.可选地,还包括有固定机构,固定机构包括有限位架、滑动板、接触架、弹簧、滚轮和引导架,机座底部连接有限位架,限位架左右两部均滑动式连接有滑动板,滑动板上远离机座的一侧均滑动式连接有接触架,接触架与滑动板之间均连接有两根弹簧,弹簧均绕在接触架上,弹簧的顶端均与接触架连接,弹簧的底端均与滑动板连接,接触架下部均转动式连接有滚轮,限位架前后两部的下侧均通过螺栓连接有引导架,向远离机座的一侧拉动接触架,会带动滑动板均向相互远离的一侧滑动,此时引导架均会对滚轮进行引导,从而在弹簧的作用下,接触架均会向下滑动并与地面接触。
8.可选地,移动轮上均设计有凹槽,用于提高移动轮与地面接触的摩擦力,防止移动轮移动过程中打滑空转。
9.可选地,阻挡块呈外扩状态分布,能够对探照灯的偏转角度进行限制,同时能够提
供足够的偏转空间,避免探照灯的灯光向前侧照射,影响车辆行驶。
10.可选地,引导架远离机座的一部分均为向下倾斜的设计,便于引导滚轮缓慢地向下运动。
11.有益效果是:1、本实用新型通过调节环状固定架的位置,达到对探照灯的照射方向和高度进行调节的效果,从而使得现场施工人员在夜间施工作业时,能够减少额外光源的使用,降低电力消耗成本。
12.2、本实用新型通过接触架与地面接触,从而对移动轮进行限制,避免机器人在工作状态下时进行移动,提高了机器人的放置稳定性。
附图说明
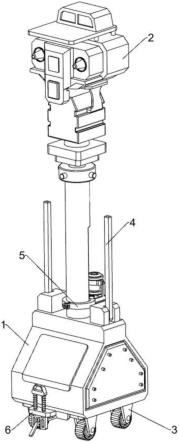
13.图1为本实用新型的立体结构示意图。
14.图2为本实用新型探照机构的立体结构示意图。
15.图3为本实用新型固定机构的第一种剖面立体结构示意图。
16.图4为本实用新型固定机构的第二种剖面立体结构示意图。
17.附图中各零部件的标记如下:1_机座,2_机器人检测组件,3_移动轮,4_摆动杆,5_探照机构,51_环状固定架,52_螺杆,53_调节螺母,54_阻挡块,55_探照灯,6_固定机构,61_限位架,62_滑动板,63_接触架,64_弹簧,65_滚轮,66_引导架。
具体实施方式
18.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型作进一步地详细描述。仅此声明,本实用新型在文中出现或即将出现的上、下、左、右、前、后、内、外等方位用词,仅以本实用新型的附图为基准,其并不是对本实用新型的具体限定。
19.实施例1
20.一种施工现场管理机器人,如图1所示,包括有机座1、机器人检测组件2、移动轮3、摆动杆4和探照机构5,机座1顶部连接有机器人检测组件2,机器人检测组件2用于对施工现场的工人进行规范性检测,机座1底部转动式连接有四个移动轮3,移动轮3上均设计有凹槽,用于提高移动轮3与地面接触的摩擦力,防止移动轮3移动过程中打滑空转,机座1左右两部的上侧均转动式连接有摆动杆4,摆动杆4用于套放标识旗帜,机器人检测组件2上设有用于提供夜间照明,便于人们夜间作业的探照机构5。
21.如图1和图2所示,探照机构5包括有环状固定架51、螺杆52、调节螺母53、阻挡块54和探照灯55,机器人检测组件2上滑动并转动式连接有环状固定架51,环状固定架51前部螺纹式连接有螺杆52,螺杆52上螺纹式连接有调节螺母53,螺杆52和调节螺母53之间配合能够使得环状固定架51夹紧,从而使得环状固定架51不再能够滑动和转动,环状固定架51后部上侧连接有两个阻挡块54,环状固定架51后部上侧转动式连接有探照灯55,探照灯55能够在夜间对施工现场进行照射,提供充足的夜间照明,阻挡块54呈外扩状态分布,能够对探照灯55的偏转角度进行限制,同时能够提供足够的偏转空间,避免探照灯55的灯光向前侧照射,影响车辆行驶。
22.施工现场管理机器人一般用于代替人工,对施工现场的人员进行规范性检测,同时能够为过往车辆进行提示,在使用施工现场管理机器人时,首先需要通过推动机座1使得
移动轮3均开始转动,从而将机器人推动到指定检测地点,然后启动机器人检测组件2,开始对施工现场进行检测,检查施工人员是否根据要求进行安全施工,同时将套有警示表示的摆动杆4均向远离机器人检测组件2的一侧转动展开,对施工道路进行阻挡,起到提示的作用,当夜间施工作业时,可以根据施工位置,启动探照灯55,然后转动调节螺母53,使得螺杆52与调节螺母53之间松开接触,从而会使得环状固定架51不再处于夹紧受力的状态,此时人们可以转动环状固定架51对探照灯55的照射方向进行调节,在转动调节环状固定架51的时候,阻挡块54均会对环状固定架51的转动角度进行限制,当阻挡块54接触到机器人检测组件2时,表明环状固定架51已经转动到极限,无法继续转动,之后向上抬升环状固定架51,对探照灯55的高度进行调整,最后转动探照灯55,对探照灯55的照射角度进行调节,当所有的步骤都调节完毕后,反向转动调节螺母53,从而在调节螺母53和螺杆52的配合下,能够使得环状固定架51开始夹紧机器人检测组件2,从而达到固定环状固定架51的效果,此时施工现场管理机器人便能够在夜间为施工现场提供一定的光源,便于施工人员夜间作业,当作业结束后,转动调节螺母53,使得螺杆52与调节螺母53之间松开接触,从而会使得环状固定架51不再处于夹紧受力的状态,之后人们需要将环状固定架51先转动复位,然后向下推动环状固定架51复位,之后反向转动调节螺母53,使得环状固定架51夹紧固定,紧接着转动探照灯55复位,并将探照灯55关闭,之后将摆动件均向靠近机器人检测组件2的一侧转动复位,最后关闭机器人检测组件2即可,综上所述,通过调节环状固定架51的位置,达到对探照灯55的照射方向和高度进行调节的效果,从而使得现场施工人员在夜间施工作业时,能够减少额外光源的使用,降低电力消耗成本。
23.如图1、图3和图4所示,还包括有固定机构6,固定机构6包括有限位架61、滑动板62、接触架63、弹簧64、滚轮65和引导架66,机座1底部连接有限位架61,限位架61左右两部均滑动式连接有滑动板62,滑动板62上远离机座1的一侧均滑动式连接有接触架63,接触架63均能够与地面进行接触,从而提高机器人在现场放置时的稳定性,接触架63与滑动板62之间均连接有两根弹簧64,弹簧64均绕在接触架63上,弹簧64的顶端均与接触架63连接,弹簧64的底端均与滑动板62连接,接触架63下部均转动式连接有滚轮65,限位架61前后两部的下侧均通过螺栓连接有引导架66,滚轮65均能够在引导架66上滚动,引导架66远离机座1的一部分均为向下倾斜的设计,便于引导滚轮65缓慢地向下运动。
24.在施工现场管理机器人进入工作状态时,为了提高机器人的放置稳定性,需要对移动轮3进行一定的限制,从而避免移动轮3转动带动机器人移动,在机器人运动至指定位置后,施工人员需要将接触架63均向远离机座1的一侧拉动,从而使得滑动板62均向远离机座1的一侧滑动,此时滚轮65均会沿着引导架66的斜面开始缓慢的向下运动,初始状态下,弹簧64均处于受力拉伸的状态,随着滚轮65开始逐渐向下运动,在弹簧64的作用下,接触架63均会开始缓慢的向下滑动,直到滑动板62均滑动至极限位置时,滚轮65将不再继续沿着引导架66运动,此时在弹簧64的作用下,接触架63与地面接触,增强机器人的放置稳定性,从而达到对移动轮3的限制效果,当机器人工作结束后,通过将接触架63均向靠近机座1的一侧推动,会使得滑动板62均向靠近机座1的一侧滑动复位,从而导致滚轮65开始在引导架66的引导下向上运动,进而使得接触架63均开始向上滑动复位,弹簧64均开始受力拉伸,此时接触架63均不再与地面接触,移动轮3失去限制,可以再次辅助机器人进行移动,综上所述,通过接触架63与地面接触,从而对移动轮3进行限制,避免机器人在工作状态下时进行
移动,提高了机器人的放置稳定性。
25.虽然已经参照示例性实施例描述了本实用新型,但是应理解本实用新型不限于所公开的示例性实施例。以下权利要求的范围应给予最宽泛的解释,以便涵盖所有的变型以及等同的结构和功能。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1