一种路边泊车的智能阻车装置的制作方法
1.本实用新型涉及路边停车管理技术领域,具体涉及一种路边泊车的智能阻车装置。
背景技术:
2.随着我国车辆保有量的持续增长,车辆的停放已经成为一个城市交通难题,停车场的车位数量不足以及收费高昂困扰着众多车主,使用部分车流较少道路的路侧停车位则成为缓解停车难问题的重要手段之一。
3.伴随着城市路侧停车进程的推进,已经涌现出多种路侧停车的解决方案,由起初单一的纯人工看管泊位模式,逐渐衍生出采用视频采集、地磁检测等模式,而后又出现了利用视频检测器自动采集数据的模式。但是由于路侧停车的停车环境较为复杂,目前路侧停车监管很难兼顾准确率和效率。其中人工管理会产生高额的执法成本,工作人员需要对路边停车的车辆进行登记或收取费用,这个过程费时费力,由于管理人员穿行于路边,容易造成安全事故。视频采集方案由于光线变化、遮挡、车辆姿态转变、相机视角变换等问题,尤其是在路侧泊车位的场景中,车辆呈线性排列,对相机的安装高度和角度提出了很高的要求。此外,由于相机视角的限制,相邻的车辆在图像平面上显示出严重的重叠和遮挡,难以实现精准识别车辆信息。互联网管理虽然在一定程度上解决了登记、收费和找车位困难的问题,单随之而来的车位管理系统的供电问题和获取车辆信息方式复杂的问题需要解决。
4.目前也有出现路边锁车技术方案,如:公告号 cn210368741u公开的“一种智能停阻车器,包括:位于地面下方的外筒、置于外筒内部的内筒和设置在外筒底端的控制箱,所述内筒与所述外筒同轴设置,所述内筒通过升降机构与所述外筒相连接”,该种技术方案要把阻车器箱体埋入地面一下,对水泥路面会造成很大的或永久性伤害,为了一个安装一个阻车器去破坏大面积路面,得不偿失;公告cn206289560u公开的“城市路边防逃逸车位锁:包括保护机构、传动机构、锁车机构、检测模块。所述的保护机构,由法兰、t型套筒与传动轴固定连接,蜗轮空套在传动轴上”,该种技术方案的保护机构凸出于地面以上,而且保护机构体积较大,该装置对路面的平整度影响较大,而且可能因为保护装置的突兀,容易造成待停车辆的剐蹭或对路边行人收到磕绊等不安全因素,市场上还有采用全部嵌入方式把阻车器与路面平齐安装,这样是美观好看,且不会磕绊、剐蹭等,但该阻车器安装时同样需要在路面破开与设备相同或相近的规格尺寸进行整体预埋,对路面的损害较大,而且阻车器槽内积水严重,对阻车器及道路都造成永久性伤害,且难以维护,一些安装产品已被叫停,同时,技术方案施工复杂、投入较大,难于推广,以上问题大大影响了路边停车的安全性和可靠性,亟待解决。
技术实现要素:
5.根据上述提出的技术问题,而提供一种路边泊车的智能阻车装置。本实用新型主要通过电机的垂直涡箱控制水平蜗杆,实现把电机嵌入地下,以最小的空间对地面进行打
孔安装,利用蜗杆带动升降板在阻挡车辆,并利用传感器装置检测车辆是否位于停车位上,从而实现停车位中车辆的智能泊车。
6.本实用新型采用的技术手段如下:本实用新型公开了一种路边泊车的智能阻车装置,包括:固定基板,转动轴,轴承,轴承壳体,升降挡板,电机,电机座,涡箱,涡轮,蜗杆,电机盒,复合探测器,角度传感器,引导胶片,控制器及电源;所述的固定基板是一长方形金属基板,固定基板的两侧边处有凸出的耳孔,引导胶片分别用螺钉固定在耳孔上,固定基板的两端分别焊接固定一轴承,两轴承之间安装转动轴,转动轴上通过螺丝固定安装一升降挡板,轴承上通过螺栓密封防水固定轴承壳体,在固定基板一端的轴承处,转动轴穿过轴承与涡箱的蜗杆通过螺栓紧密连接;所述的固定基板,在固定基板的涡箱侧切割一圆孔,在圆孔的靠近地面侧密封焊接一封闭性圆柱形电机盒,电机深入进电机盒内,电机通过螺栓固定在电机座上,电机座密封固定在固定基板的电机盒圆孔的部位,电机的转轴与涡箱内的涡轮连接,涡箱内的涡轮和蜗杆是90
°
啮合转动连接,蜗杆通过螺栓与转动轴固定连接,竖直于地面以下电机转动带动涡轮,涡轮旋转带动蜗杆转动,蜗杆转动带动转动轴在水平方向上转动,从而实现升降挡板的打开或放平;所述的复合探测器固定在远离电机端一侧的轴承壳体内;所述的角度传感器用螺丝固定在转动轴的一端,转动轴旋转带动角度传感器发生角度变化,所述的控制器在电机端一侧的轴承壳体内,电源的电力线分别与电机和复合探测器电力连接,构成该智能阻车器的电力回路。
7.所述的轴承壳体,其特征在于靠近电机端的轴承壳体为大端轴承壳体,大端轴承壳体为梯形状,大端轴承壳体的梯形高为3-5cm,上底为10-20cm,长斜边为33-45cm,短斜边在25-30cm,下底为35-55cm,并与固定基板的宽度相同;大端轴承壳体的宽度为8-15cm,大端轴承壳体内的底板上通过螺丝固定安装控制器和备急用锂电池;远离电机端的轴承壳体为小端轴承壳体,小端轴承壳体也是梯形状,小端轴承壳体的梯形高为3-5cm,上底为5-10cm,长斜边为35-50cm,短斜边在25-35cm,下底为35-55cm,并与固定基板的宽度相同,小端轴承壳体的宽度为5-8cm,小端轴承壳体顶部开一长为3cm,宽为2cm的方孔,复合探测器通过螺丝安装于小孔处,小孔的上面覆盖一有机玻璃并用胶密封固定,复合探测器的探测信号通过小孔向外发出;在两轴承壳体的之间的长斜边侧是升降挡板的放置区,短斜边侧之间的固定基板上焊接一金属板斜坡,斜坡金属板的厚度为0.5-1.5cm,斜坡板的高度与转动轴的高度平齐,以引导车轮平稳通过阻车器本体。
8.所述的固定基板,其特征在于固定基板是长方形低碳钢板结构,长为60-150cm,宽为30-50cm,厚度为0.5-1.5cm,基板上开有4-6个定位孔,膨胀螺丝固定于地面后,通过定位孔把固定基板牢固的固定在地面上。
9.所述的引导胶片,其特征在于引导胶片是一楔形,胶片的厚边侧紧贴固定基板,其厚度与固定基板的厚度相同,以引导车轮平稳过度到地面。
10.所述的升降挡板,其特征在于升降挡板是一低碳钢板,升降挡板的长为50-120cm,宽为30-40cm,厚度为0.5-1cm,升降挡板与固定基板之间通过螺栓安装一活动防撞链,升降挡板与地面成90
°
角时,防撞链刚好拉直,以防止车轮撞击升降挡板损坏轴承及涡箱。
11.所述的电机盒,其特征在于电机盒是一个圆柱形空腔,圆柱的直径为12-18cm,圆柱长度为20-40cm,电机座覆盖在电机盒的开口处,通过螺栓及垫圈密封固定在固定基板上,电机密闭于电机盒内,涡箱通过螺栓固定在电机座上,其中,涡箱的蜗杆伸出电机盒与
转动轴通过螺丝紧密连接,涡箱的涡轮深入于电机盒内并与电机轴通过螺丝牢固连接,构成阻车器的传动机构。
12.所述的复合探测器,其特征在于复合探测器为地磁探测器、红外探测器、超声波探测器及微波探测器中的至少三种复合而成,复合探测器的导线通过转动轴前下部的穿线管与控制器电力连接。
13.所述的角度传感器,其特征在于角度传感器通过导线与控制器连接,并把角度变化值反馈致控制器,控制器根据角度变化驱动电机旋转并带动升降挡板。
14.所述的控制器,其特征在于控制器通过导线与复合探测器连接并进行信息反馈,控制器获取复合探测器的探测信息并驱动电机动作,控制器通过导线与角度传感器连接并进行信息反馈,控制器获取角度传感器的转动轴的加速度、角速度、角度的运动姿态信息,并根据该信息进一步驱动电机并调整电机转速和制动,控制器预留有通信接口,可以与第三方通信模块连接。
15.所述的电源,其特征在于电源包括备急电源和市电电源,其中,市电电源是智能阻车装置的主供电电源,市电电源停电后启动备急电源,备急电源为锂电池和铅酸电池中的一种,备急电源的输出电压为12v、24v中的一种。
16.较现有技术相比,本实用新型具有以下优点:
17.1、本实用新型的智能阻车装置,采用复合探测器对周围环境进行探测,可识别出锁车装置周围哪些地方有物体,哪些地方没有物体,以及该物体是不是车辆。
18.2、本实用新型的智能阻车装置的传动机构选用变向传动,安装时使原来把箱体全部嵌入地下改为采用打圆孔即可嵌入地下,对路面的破坏程度小,且已于安装。
19.3、本实用新型的的智能阻车装置,采用电机、涡轮及涡箱通过电机盒嵌入地下,避免了原有的涡箱及电机全在地面以上,容易造成剐蹭及磕绊等不安全因素的发生可能,安全可靠。
20.4、本实用新型的智能阻车装置,可以建设于停车路测及园区门前零散建设,对于相对闲置的小块空地,可以安装,从而增加停车位,缓解城市停车难,一举两得;同时,可以节省大量人力,工作效率高,便于推广。
附图说明
21.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图做以简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
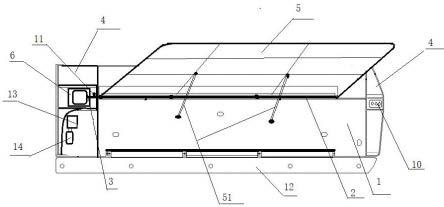
22.图1为本实用新型一种路边泊车的智能阻车装置的结构示意图;
23.图2为本实用新型一种路边泊车的智能阻车装置的主视结构示意图;
24.图3为本实用新型一种路边泊车的智能阻车装置的涡箱结构示意图;
25.图4为本实用新型一种路边泊车的智能阻车装置的电路结构示意图;
26.图中:1、固定基板,2、转动轴,3、轴承,4、轴承壳体,41、大端轴承壳体,42、小端轴承壳体,5、升降挡板,51、活动防撞链,6、涡箱,61、涡轮,62、蜗杆,7、电机座,8、电机,9、电机盒,10、复合探测器,11、角度传感器,12、引导胶片,13、控制器,14、电源。
45cm,短斜边在25-30cm,下底为35-55cm,并与固定基板1的宽度相同;大端轴承壳体41的宽度为8-15cm,大端轴承壳体41内的底板上通过螺丝固定安装控制器13和备急用锂电池14;远离电机8端的轴承壳体4为小端轴承壳体42,小端轴承壳体42也是梯形状,小端轴承壳体42的梯形高为3-5cm,上底为5-10cm,长斜边为35-50cm,短斜边在25-35cm,下底为35-55cm,并与固定基板的宽度相同,小端轴承壳体42的宽度为5-8cm,小端轴承壳体42顶部开一长为3cm,宽为2cm的方孔,复合探测器10通过螺丝安装于小孔处,小孔的上面覆盖一有机玻璃并用胶密封固定,复合探测器10的探测信号通过小孔向外发出;在两轴承壳体的之间的长斜边侧是升降挡板5的放置区,短斜边侧之间的固定基板上焊接一金属板斜坡,斜坡金属板的厚度为0.5-1.5cm,斜坡板的高度与转动轴3的高度平齐,以引导车轮平稳通过阻车器本体。
43.所述的固定基板,其特征在于固定基板1是长方形低碳钢板结构,长为60-150cm,宽为30-50cm,厚度为0.5-1.5cm,基板上开有4-6个定位孔,膨胀螺丝固定于地面后,通过定位孔把固定基板1牢固的固定在地面上。
44.本实施例中阻车器本体包括:固定基板1,轴承2、轴承壳体4,转动轴3及升降挡板5均由惠州市坚信泰五金制品有限公司定制生产,其中固定基板1选用优质q235低碳钢板,钢板的厚度为1.0cm,长度为135cm,宽度为45cm,基板上开设5个定位孔,轴承3孔径为25mm,转动轴2与轴承3匹配,转动轴2长度为120cm,升降挡板5长度为115cm,宽度为35cm,厚度为0.8cm,升降挡板5与固定基板1之间通过螺栓安装一活动防撞链51,升降挡板5与地面成90
°
角时,防撞链51刚好拉直,以防止车轮撞击升降挡板5损坏轴承3及涡箱6,轴承壳体中的大端轴承壳体的梯形高为4.5cm,上底为15cm,长斜边为40cm,短斜边在25cm,下底为45cm,并大端轴承壳体41的宽度为12cm,以满足涡箱6开孔全部在大端轴承壳体41内;小端轴承壳体42的梯形高为3-5cm,上底为5-10cm,长斜边为35-50cm,短斜边在25-35cm,下底为35-55cm,并与固定基板1的宽度相同,小端轴承壳体42的宽度为6cm,小端轴承壳体42顶部开长为3cm,宽为2cm的方孔,在两轴承壳体的之间的长斜边侧是升降挡板5的放置区,短斜边侧之间的固定基板上焊接一金属板斜坡,斜坡金属板的厚度为0.8cm。
45.所述的引导胶片,其特征在于引导胶片12是一楔形,胶片的厚边侧紧贴固定基板1,其厚度与固定基板的厚度相同,以引导车轮平稳过度到地面。
46.所述的电机盒,其特征在于电机盒9是一个圆柱形空腔,本实施例中电机盒9由惠州市坚信泰五金制品有限公司定制生产,电机盒9的圆柱空腔直径为12cm,圆柱长度为25cm,电机座7覆盖在电机盒9的开口处,通过螺栓及垫圈密封固定在固定基板1上,电机8密闭于电机盒9内,涡箱6通过螺栓固定在电机座7上,其中,涡箱6的蜗杆62伸出电机盒9与转动轴2通过螺丝紧密连接,涡箱6的涡轮61深入于电机盒9内并与电机轴通过螺丝牢固连接,构成阻车器的传动机构。
47.所述的复合探测器,其特征在于复合探测器10为地磁探测器、红外探测器、超声波探测器及微波探测器中的至少三种复合而成,本实施例中复合探测器为地磁探测器、红外探测器、超声波探测器及微波探测器四种构成,其中,红外感应器:东莞市星响电子科技有限,产品型号:mf50,市场购得;地磁感应器:广东世臣科技有限公司,产品型号:sc-pgs-wtt2,市场购得;超声波感应器:佛山市科森科技有限公司,产品型号:ks-a2440h13ct/r,市场购得;微波感应器:上海协堡电子有限公司,产品型号:slds-h100-50a,市场购得;复合探测器的导线通过转动轴2前下部的穿线管与控制器13电力连接。
48.所述的角度传感器,其特征在于角度传感器11通过导线与控制器13连接,并把三轴的角度变化值反馈致控制器,控制器11根据角度变化驱动电机8旋转并带动升降挡板5,本实施例中角度传感器选用山西维特森科技有限公司,产品型号:vta83k12,市场购得。
49.所述的控制器,其特征在于控制器13通过导线与复合探测器10连接并进行信息反馈,本实施例控制器由合肥赛因斯智控技术有限公司定制生产,控制器的mcu采用stm32f103ret6型,该芯片模组基于arm高密度性能线32位mcu,具有265-512位闪存,usb,can,11个定时器,3个adc,13个通信接口,可以满足控制其的技术需求,控制器13获取复合探测器10的探测信息并驱动电机8动作,控制器13通过导线与角度传感器11连接并进行信息反馈,控制器13获取角度传感器11的三轴的加速度、角速度、角度的运动姿态信息,并根据该信息进一步驱动电机8并调整电机8转速和制动,控制器13预留有通信接口,可以与第三方通信模块连接。
50.所述的电源,其特征在于电源14包括备急电源和市电电源,其中,市电电源是智能阻车装置的主供电电源,市电电源停电后启动备急电源,备急电源为锂电池和铅酸电池中的一种,备急电源的输出电压为12v、24v中的一种,本实施例中备急电源选用上海星孚新能源科技有限,产品型号:xf-18650/4的18650电芯的12v5000ma的磷酸铁锂电池。
51.具体实施例使用过程:
52.本实施例的具体使用如下:首先在路边通过打孔机在路面打一圆孔,孔径大于电机盒1cm 的圆孔,孔深大于电机盒高度1cm,把电机盒深入路面孔径内,然后把固定基板通过膨胀螺丝牢固的固定在路面上,接通市电电力,阻车器的升降挡板生平放置于固定基板上,当阻车器上部停放车辆时,停阻车器的复合探测器探测到有车辆停放,复合探测器把该信息反馈至控制器,控制器向电机发出动作信号,电机旋转带动涡轮、蜗杆及转动轴旋转,升降挡板开始升起,在升降挡板升起过程中,随着转动轴的转动,角度传感器也转动,角度传感器把升降挡板旋转的角度或高度信号反馈致控制器,控制器根据升降挡板的高度与车辆地盘的高度通过角度传感器及复合探测器的综合信息进行比较,以防止升降挡板升起过高剐蹭车辆地盘,当升降挡板距车辆底板1cm左右时,控制器发出停止电机动作信号,电机停止运行,升降挡板静止阻止车辆运行,并开始对停泊车辆进行泊车计时;但需要开车时,通过扫描阻车器二维码,控制器连接第三方远程控制中心,第三方控制中心下到解锁指令,控制器驱动电机工作,升降挡板开始下降直至水平位置,控制器控制电机停止工作,车辆启动,顺利通过阻车器本体,本次智能泊车过程结束,再次有车辆停泊在该阻车器上方时,智能阻车器重复上次过程,如此循环往复。
53.最后应说明的是:以上各实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述各实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1