一种斜拉桥缆索表面状态检测智能装置
本发明涉及缆索检测领域,更具体地说,涉及一种斜拉桥缆索表面状态检测智能装置。
背景技术:
1、在众多大跨度桥梁建造形式中,斜拉桥凭借其跨度范围大,安全性能高,建造过程相对简单的优点逐渐成为首选类型。随着斜拉桥应用越来越广泛,其安全性越来越被重视。作为斜拉桥中数量最多,受力最复杂的构件,斜拉索的安全至关重要,直接影响整座桥梁的使用寿命,因此需对拉索表面及内部钢丝可能出现的缺陷进行定时检查与修复。由于缆索长期服役于大气之中,受到锈蚀,直接影响着桥梁的使用安全和外观。目前多数斜拉桥仍采用人工作业手段,效率低,安全性不高,检测费用高。
2、斜拉桥的桥面以上的部分由梁、索、塔组成,缆索作为斜拉桥的重要构件之一,通常外部有高密度聚乙烯护套保护但其长期暴露在空气中,在风吹日晒、空气中的腐蚀性物质作用、自然老化,会造成其表面的保护层有不同程度的腐蚀、开裂,严重的会使得保护层下的缆索的钢丝束得不到保护而产生生锈、断丝等严重问题;过往车辆以及气候变化导致缆索的过大的摆动会对桥梁的稳定性产生影响。为了及时发现并消除影响斜拉桥的安全隐患,需定期对缆索进行例行检测。
3、在现有的、中,绝大多数只能适应一种直径的缆索,由于不同的斜拉桥其缆索的直径不同,就要求缆索检测机器人的适应直径也应有相应的变化,因此,开发研制出适合于缆索这种标高高、斜度大、直径不同、有一定挠度且爬升距离长的特殊对象的检测机器人就变得十分重要。
技术实现思路
1、针对现有技术中存在的问题,本发明的目的在于提供一种斜拉桥缆索表面状态检测智能装置,它可以实现根据不同直径、不同挠度和不同斜度进行调节导向轮的状态使得检测智能装置可以稳定爬行。
2、为解决上述问题,本发明采用如下的技术方案。
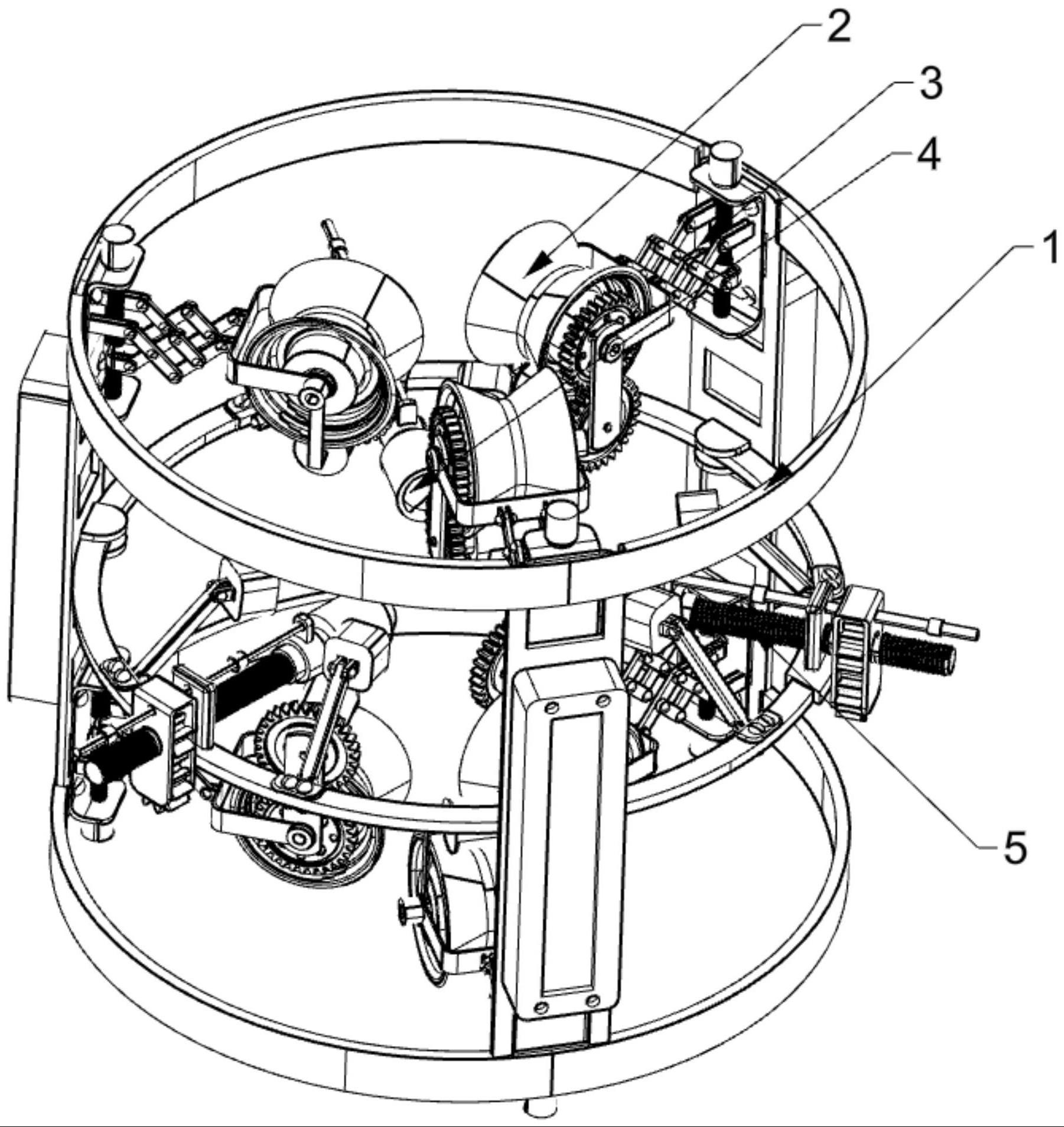
3、一种斜拉桥缆索表面状态检测智能装置,包括架体、位于架体内部的导向轮以及用于在架体和导向轮之间构成传动的第一驱动件;所述导向轮和所述第一驱动件均设有多个,沿一固定轴线圆周阵列分布多个形成一个支撑导向结构,所述支撑导向结构沿固定轴线的轴向方向线性阵列分布两组;所述两组支撑导向结构之间设有多组万向轮;所述万向轮处设有用于在万向轮和架体之间构成传动的第二驱动件;所述第一驱动件用于使所述导向轮靠近或远离缆索,以使导向轮与固定轴线的距离变大或变小;所述第二驱动件用于使万向轮靠近或远离缆索,以使万向轮与固定轴线的距离变大或变小;所述导向轮上至少形成有两个与缆索抵接的接触面;所述架体上设置有用于对缆索表面状态进行检测的涡流检测器。
4、通过万向轮的相互靠近和相互远离,可以调节万向轮与固定轴线的距离,固定轴线便是缆索的轴线,那么可以使万向轮与不同直径大小的缆索进行抵接,从而可以用在不同的缆索上进行爬升,提高了适用范围,另外通过万向轮与缆索抵接,并且万向轮在两组支撑导向结构之间,那么可以在一定程度上对架体进行导向,将两组支撑导向结构上的万向轮用前面的万向轮和后面的万向轮来表达,那么便是从原本的两组与缆索接触的结构变为了三组,增加了稳定性,由于缆索是挠性的,且缆索是倾斜的,那么通过在前后两组导向轮的中间设置万向轮进行支撑,在一定程度上可以降低或避免缆索受到前后两组万向轮处的作用力发生的挠性变形,从而尽可能的保证了两组导向轮之间的缆索接近直的,从而提高了爬行缆索的稳定性。
5、进一步的,所述第一驱动件包含:第一安装架,第一安装架上设有第一驱动丝杠,第一驱动丝杠上安装第一驱动螺母;安装架上固定安装有铰接板;所述铰接板与第一驱动螺母处设有平行四杆机构;所述第一驱动丝杠的端部设有第一驱动电机,所述第一驱动电机用于驱动第一驱动丝杠转动,以使第一驱动螺母与铰接板靠近或远离;所述平行四杆机构的一端与驱动螺母和铰接板相连,另一端与导向轮直接或间接相连;所述第一驱动螺母靠近铰接板时,平行四杆机构使导向轮靠近缆索运动;所述第一驱动螺母远离铰接板时,平行四杆机构使导向轮远离缆索运动。
6、通过平行四杆机构的设置,可以使导向轮靠近或远离绳索,并且平行四杆机构可以在较小的空间中使导向轮具有较大的位移量,从而可以在保证整体装置的体积小巧的同时,使导向轮可以适配更大的缆索进行爬行,从而实现了产品小巧,爬行范围大的效果。
7、进一步的,所述第二驱动件包含:固定座,固定座与架体固定连接,固定座中设有第二驱动丝杆,第二驱动丝杆转动安装于固定座处;固定座上安装第二驱动电机和齿轮传动结构;所述驱动电机通过齿轮传动结构带动第二驱动丝杠旋转;第二驱动丝杆上设有第二驱动螺母,第二驱动螺母上固定安装导向杆,导向杆穿过固定座且与固定座滑动连接;导向杆上形成有两个挡环,且固定座位于两个挡环之间;导向杆与万向轮相连。
8、通过丝杠和螺母带动导向杆运动,使导向杆带动万向轮运动,从而实现了万向轮在靠近和远离缆索,并且在妄想轮运动的过程中,节省了导向杆的占用空间,进一步的降低了产品的体积。
9、进一步的,所述平行四杆机构处设有连接装置,所述连接装置用于使所述平行四杆机构与所述导向轮间接连接;所述连接装置包含:传动架,传动架与平行四杆机构连接,且导向轮转动安装于传动架中;所述传动架上安装动力件,所述动力件用于驱动所述导向轮旋转。
10、进一步的,所述导向轮包含:第一接触部和第二接触部以及用于将第一接触部和第二接触部相连的连接部;所述接触面形成在所述第一接触部和第二接触部上,且第一接触部上的接触面与第二接触部上的接触面形成有120-150°的夹角。
11、通过导向轮上的两个接触面与缆索接触,可以实现导向轮将缆索夹住,从而提高导向轮在缆索上转动的稳定性,并且通过多点与缆索接触,也提高了产品爬行时的稳定性。
12、进一步的,所述接触面上形成有多个用于与缆索抵接的接触位,且接触面与缆索接触时,只有一个接触位与缆索抵接。
13、接触面上存在多个接触位,可以实现在不同直径的缆索上爬行使用不同的接触位来与缆索抵接;从而可以避免长期使用一个接触位于缆索抵接导致接触位所在的位置的接触面发生磨损,更好的保证爬行的效果和爬行的稳定性;另外接触位是指接触面与缆索抵接的接触点在导向轮旋转时,接触点转动形成的圆形线。
14、进一步的,所述连接装置还包含:支撑架,所述传动架安装于支撑架上;所述支撑架上安装第三驱动件,所述第三驱动件用于驱动传动架靠近或远离支撑架;所述传动架上安装第四驱动件,所述第四驱动件用于驱动第一接触部和第二接触部相互靠近或相互远离;所述传动架处设有视觉监测装置,所述视觉监测装置用于监测与缆索抵接的接触位的平整度;所述第三驱动件和所述第四驱动件均与视觉监测装置有线或无线连接。
15、第四驱动件使第一接触部和第二接触部相互靠近或相互远离,可以使第一接触部与第二接触部在不同的位置与缆索进行接触,从而实现了面对相同直径的缆索,可以使第一接触部和第二接触部上不同的接触位与缆索接触,同时也可以实现使用同样的接触位与不同直径大小的缆索进行接触,从而在一定程度可以在一个接触位发生磨损时,切换到另一个接触位,从而可以提高爬行时的稳定性,以及设备的整体使用寿命;如在与缆索抵接的一个接触位发生磨损时,可能会导致导向轮转动到磨损处与缆索接触时,导向轮会发生晃动,从而会影响爬行的稳定性以及检测的准确性,那么通过视觉监测装置发现接触位出现磨损时,第四驱动件使第一接触部和第二接触部靠近或远离,那么第一接触部和第二接触部会换一个接触位与缆索抵接,从而在设备爬行过程中导向轮出现磨损时,可以及时更正,保证检测结果的稳定性,另外第三驱动件会带动传动架远离或靠近支撑架,那么在第一接触部和第二接触部相互靠近时,会导致与缆索抵接的接触位与导向轮轴心的距离增加,那么会导致多个接触位与架体的距离不一,从而影响稳定性,那么第三驱动件使传动架靠近或远离支撑架,可以对位置进行调整,使更换后的接触位与其他没有更换的接触位均保证与架体的距离一致,从而保证了爬行过程的稳定性。
16、进一步的,所述连接部包含:第一连接板和第二连接板以及位于第一连接板和第二连接板之间的弹性环,第一连接板与第一接触部固定,第二连接板与第二接触部固定。
17、第一接触部和第二接触部会远离,那么通过弹性环的设置可以保证第一接触部和第二接触部是连在一起的。
18、进一步的,所述传动架上安装有转动轴,所述转动轴贯穿第一接触部、第二接触部、第一连接板和第二连接板;所述转动轴中开设有容纳槽,所述弹性环、第一连接板和第二连接板围成控制腔;所述转动轴上开设多个通孔以使容纳槽与控制腔连通;所述容纳槽中设有推动部,所述容纳槽和控制腔中均填充液体,所述推动部处设有第五驱动件,以使推动部在容纳槽中运动。
19、通过容纳槽和控制腔中填充液体,可以在一定程度上起到减震的作用,从而在导向轮转动时,可以起到震动隔绝的效果,避免震动会传递到架体或其他零件处,从而进一步保证了运行时的稳定性,以及避免震动产生的连接松动,提高使用寿命。
20、进一步的,所述弹性件上形成有多个凸起部,所述凸起部与弹性环均为弹性橡胶材料;所述推动部在容纳槽中运动用于将控制腔和容纳槽中的液体相互置换,以使弹性环膨胀至与缆索抵接或弹性环收缩至远离缆索。
21、弹性环可以膨胀,那么弹性环发生膨胀时会与缆索接触,从而可以在导向轮与缆索抵接的情况下增加了一个与缆索抵接的接触线或接触面,从而既可以增加导向轮整体与缆索的摩擦力,也可以通过多个面或线与缆索接触,增加导向轮在缆索上转动的稳定性;另外弹性环上还形成有多个凸起,那么凸起会与缆索抵接,然后发生形变,从而可以使弹性环与缆索的摩擦力除了来自导向轮的压力使得弹性环与缆索之间具有压力与摩擦系数乘积的摩擦力外还具有弹性环在液体使弹性环膨胀的压力与摩擦系数乘积的摩擦力;还具有凸起部在液体的压力下与摩擦系数乘积的摩擦力,从而使得摩擦力大大增加,提高了爬行力以及爬行稳定性。
22、相比于现有技术,本发明的优点在于:
23、一、本方案实现了根据不同直径、不同挠度和不同斜度进行调节导向轮的状态使得检测智能装置可以稳定爬行。
24、二、通过平行四杆机构对导向轮位置调节,可以实现占用空间小,调节形成大的优点,从而保证产品小巧便于携带。
25、三、通过接触面上不同的接触位均可与缆索抵接,那么可以在一个接触位发生磨损后更换另一个接触位。
26、四、通过第一接触部和第二接触部相互靠近或相互远离,可以使导向轮适配不同直径大小的缆索,增加适用范围。
- 还没有人留言评论。精彩留言会获得点赞!