一种预制立柱节段拼装的位置控制装置及控制方法与流程
本发明涉及建筑施工,具体涉及一种预制立柱节段拼装的位置控制装置及控制方法。
背景技术:
1、预制立柱节段拼装技术,逐渐运用于市政桥梁等工程上。例如大盖梁下方的超长立柱(一般可达20米),若是通过采用预制立柱吊装施工,能够大大提高现场的施工效率。在施工过程中,需要将预制立柱安装放置在预定的安装位,方便下一步的施工。由于预制立柱的质量和体积较大,安装过程中预制立柱的晃动会对预制立柱的定位造成一定的难度。为了防止对下道工序预制盖梁的安装造成较大困难,需要采取措施提高单个立柱的安装精度。
2、因此,如何提高预制立柱节段拼装位置控制的施工效率,保证预制立柱拼装节点的牢固性,是本领域技术人员亟需解决的技术问题。
3、公开于该背景技术部分的信息仅仅旨在增加对本发明的总体背景的理解,而不应当视为承认或以任何形式暗示该信息为本领域一般技术人员所公知的现有技术。
技术实现思路
1、本发明目的在于提供一种预制立柱节段拼装的位置控制装置及控制方法,通过在相邻立柱节段拼装的连接节点处固定设置固锁式连接单元,增加了连接节点的牢固性,而且,由于固锁式连接单元的设置,满足了相邻立柱节段拼装的连接节点处的强度和受力要求,无需等待连接节点现浇养护,节省了工期和施工成本,提高了施工效率,保证了预制立柱的垂直度和安装精度。
2、为了实现上述目的,本发明的技术方案是:
3、一种预制立柱节段拼装的位置控制装置,用于将待安装立柱与已安装立柱拼接,包括:
4、自控式爬轮模组,所述自控式爬轮模组包括固定结构、驱动结构和锁紧结构,所述固定结构为高强度连接杆和侧翼支架围合形成的框架结构;所述驱动结构嵌入所述侧翼支架内;所述锁紧结构包括通过联轴器连接的高强度螺纹杆和锁紧电机,所述锁紧电机和用于固定高强度螺纹杆的固定支座分别设置于不同的侧翼支架上;
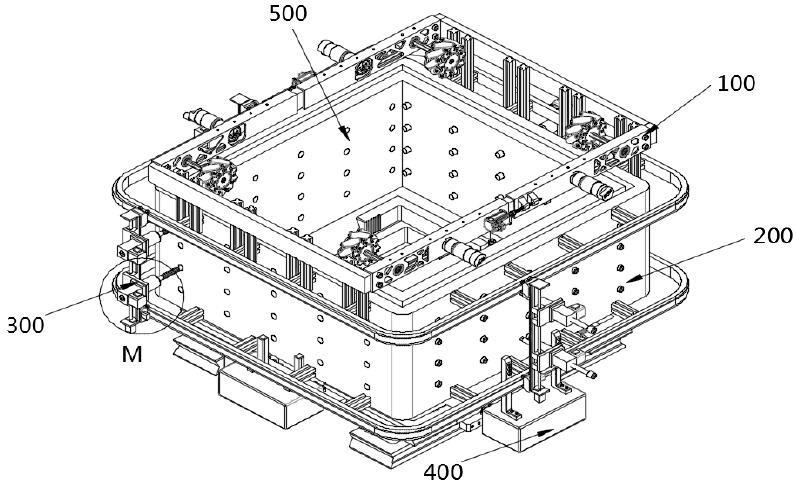
5、外框架体,所述外框架体为侧面设置预留孔的矩形框架结构,所述外框架体上下边沿环绕设置侧向支架,所述侧向支架上设置回型导轨架,所述回型导轨架上设置磁吸式轨道;
6、自控式锁紧模组,多组所述自控式锁紧模组设置于外框架体上;
7、固定夹持装置,所述固定夹持装置包括气动控制单元、连接臂节和l型夹紧组件,气动控制单元控制其两端的连接臂节侧向移动,连接臂节与l型夹紧组件固定连接形成的框架套设于预制立柱外侧,气动控制单元通过所述高强度连接杆与外框架体固定连接;
8、固锁式连接单元,所述固锁式连接单元包括内框筒架和高强度锁紧螺栓,所述内框筒架侧面设置螺栓孔,所述螺栓孔与所述外框架体侧面的预留孔一一对应,所述高强度锁紧螺栓与所述螺栓孔相配合。
9、进一步地,所述驱动结构为主齿轮、齿轮组、传送带、爬轮模组电机以及防滑防爆轮组成的滚轮式爬升模组,所述侧翼支架上设有轴承座通孔、电机安装孔,所述齿轮组设置于轴承座通孔内,并通过加长传动轴和防滑防爆轮连接;所述主齿轮通过传送带与齿轮组进行传动配合;爬轮模组电机设置于电机安装孔处,并与主齿轮连接;所述齿轮组、传送带、主齿轮均设置于侧翼支架内侧。
10、进一步地,所述外框架体侧面设置四排间距相等的预留孔,所述内框筒架侧面设置与外框体架体侧面设置数量、间距相等的螺栓孔,所述高强度锁紧螺栓设置于预留孔和螺栓孔中,连接内框筒架和外框体架体。
11、进一步地,所述自控式锁紧模组包括x向驱动系统、x向传动滑块、y向传动系统、y向丝杆滑台、滑台座、z向旋转系统以及螺旋式锁紧扳手,所述 x向传动滑块、x向驱动系统安装于不同的磁吸式轨道上,x向驱动系统通过内置驱动电机作用下沿着磁吸式轨道移动,x向传动滑块沿着磁吸式轨道移动;y向丝杆滑台和滑台座均安装于x向传动滑块外侧,y向丝杆滑台通过其底端安装的y向驱动电机控制y向丝杆的转动;所述滑台座上安装z向旋转电机,所述螺旋式锁紧扳手设置于z向旋转电机内部,且和螺旋式夹头配合连接,z向旋转电机带动螺旋式夹头旋转,从而带动螺旋式锁紧扳手螺旋转动前进。
12、本发明还提供了一种预制立柱节段拼装的位置控制方法,该控制方法包括:
13、步骤s1、提供前述的预制立柱节段拼装的位置控制装置备用;
14、步骤s2、安装完成第一根立柱后,按照节段节点的数量提供多个固锁式连接单元,并全部套设于第一根立柱上;
15、步骤s3、用吊机依次将待安装立柱吊装至设计位置,完成所有待安装立柱与已安装立柱的拼接,并进行临时固定;
16、步骤s4、吊装所述位置控制装置,采用高强度锁紧螺栓将位置控制装置的外框架体与第一个固锁式连接单元连接;
17、步骤s5、启动爬轮模组电机,主齿轮通过传送带与齿轮组进行传动配合,带动所述位置控制装置沿着立柱爬升同时启动锁紧电机,带动高强度螺纹杆转动,牵引对面的侧翼支架,完成自控式爬轮模组夹紧,待所述位置控制装置爬升至第n个连接节点处,关闭爬轮模组电机,启动z向旋转电机,带动螺旋式夹头旋转,从而带动螺旋式锁紧扳手螺旋转动前进,带动所述高强度锁紧螺栓依次穿过预留孔和螺栓孔,直至与立柱表面抵紧,完成内框筒架与立柱的锁紧连接,从而完成第一个固锁式连接单元与第n个连接节点的固定连接;
18、步骤s6、断开所述位置控制装置与第一个固锁式连接单元的固定连接,启动爬轮模组电机,主齿轮通过传送带与齿轮组进行传动配合,带动所述位置控制装置沿着立柱下降,同时启动锁紧电机,带动高强度螺纹杆转动,牵引对面的侧翼支架,完成自控式爬轮模组夹紧,待所述位置控制装置爬升至第一根立柱处,停止爬轮模组电机;
19、步骤s7、吊装所述位置控制装置,采用高强度锁紧螺栓将位置控制装置的外框架体与第二个固锁式连接单元连接;
20、步骤s8、启动爬轮模组电机,主齿轮通过传送带与齿轮组进行传动配合,带动所述位置控制装置沿着立柱爬升同时启动锁紧电机,带动高强度螺纹杆转动,牵引对面的侧翼支架,完成自控式爬轮模组夹紧,待所述位置控制装置爬升至第n-1个连接节点处,关闭爬轮模组电机,启动z向旋转电机,带动螺旋式夹头旋转,从而带动螺旋式锁紧扳手螺旋转动前进,带动所述高强度锁紧螺栓依次穿过预留孔和螺栓孔,直至与立柱表面抵紧,完成内框筒架与立柱的锁紧连接,从而完成第二个固锁式连接单元与第n-1个连接节点的固定连接;
21、步骤s9、断开所述位置控制装置与第二个固锁式连接单元的固定连接,启动爬轮模组电机,主齿轮通过传送带与齿轮组进行传动配合,带动所述位置控制装置沿着立柱下降同时启动锁紧电机,带动高强度螺纹杆转动,牵引对面的侧翼支架,完成自控式爬轮模组夹紧,待所述位置控制装置爬升至第一根立柱处,停止爬轮模组电机;
22、步骤s10、重复所述步骤s4至步骤s9,直至完成第n个固锁式连接单元与第一个连接节点的固定连接,n为大于2的自然数。
23、与现有技术相比,本发明有益的技术效果在于:
24、本发明提供的预制立柱节段拼装的位置控制装置,包括自控式爬轮模组、外框架体、自控式锁紧模组、固定夹持装置以及固锁式连接单元,自控式爬轮模组包括固定结构、驱动结构和锁紧结构;锁紧结构包括通过联轴器连接的高强度螺纹杆和锁紧电机;外框架体上下边沿环绕设置侧向支架,侧向支架上设置回型导轨架,回型导轨架上设置磁吸式轨道;多组自控式锁紧模组设置于外框架体上;固定夹持装置的气动控制单元控制其两端的连接臂节侧向移动,连接臂节与l型夹紧组件固定连接形成的框架套设于预制立柱外侧;固锁式连接单元包括内框筒架和高强度锁紧螺栓,内框筒架侧面设置的螺栓孔与预留孔一一对应,与高强度锁紧螺栓相配合。爬升式固锁系统用于多根立柱节段拼装的连接节点端面处的加强连接固定,增强连接的牢固和稳定性。防止相邻两根立柱连接点疲劳损坏,尤其适用于多根立柱临时固定措施,代替人工劳动力在危险环境下自动无人作业。
- 还没有人留言评论。精彩留言会获得点赞!