基于图像识别的路面裂缝无色差智能修补系统及方法
本发明涉及道路养护,尤其涉及一种基于图像识别的路面裂缝无色差智能修补系统及方法。
背景技术:
1、本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
2、受气候、湿度和交通荷载的影响,沥青路面会出现不规则的裂缝,进而降低沥青路面的使用寿命和舒适性,因此需要对路面裂缝进行及时的养护。
3、目前,沥青路面裂缝修补技术主要依赖人工开槽修补,但是,开槽施工对沥青路面的结构损伤较大,自动化程度交底,同时沥青路面修补后的部分与原路面会存在较大色差。
4、另外,现有技术公开的沥青路面修补方法,往往仅依赖于修补设备的机械结构,缺少智能算法,虽然已有技术公开了将神经网络算法应用与沥青路面的智能修补,但是仍然存在识别准确度低的问题,并且无法解决修补路面与原有路面颜色存在偏差的问题。
技术实现思路
1、为了解决上述问题,本发明提出了一种基于图像识别的路面裂缝无色差智能修补系统及方法,通过实例分割算法实现对沥青路面裂缝的精确分割,根据裂缝的形状切割裂缝槽,降低了开槽修补方法对路面结构的损坏;使用染色颜料调整沥青冷拌料的颜色,使得修补后的路面区域与原路面区域的颜色保持一致。
2、在一些实施方式中,采用如下技术方案:
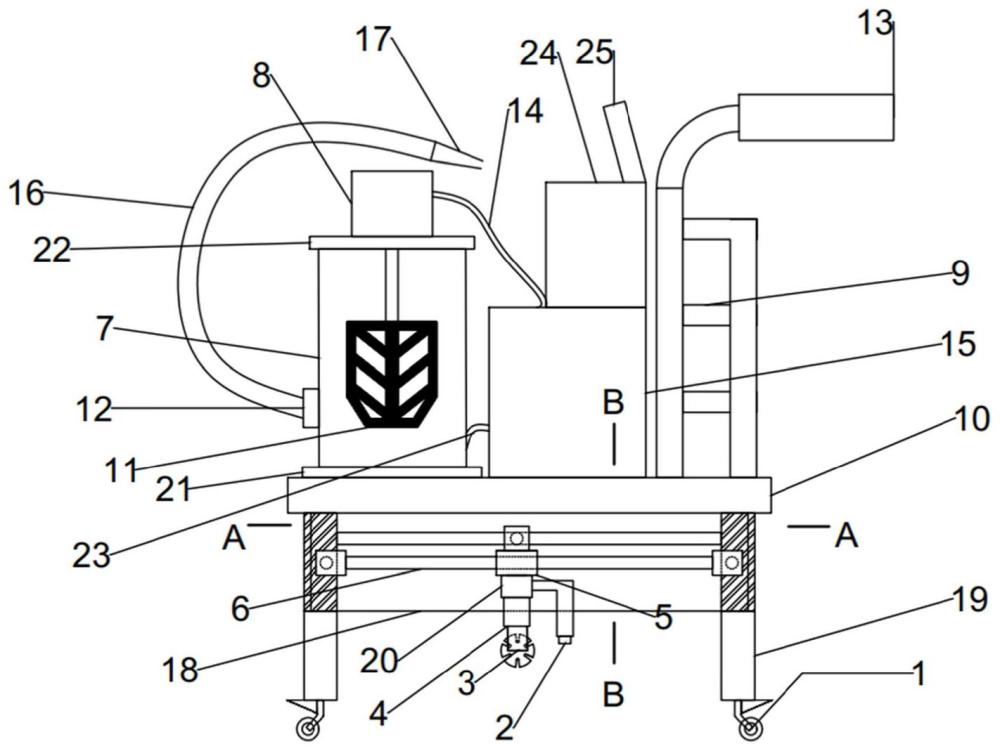
3、一种基于图像识别的路面裂缝无色差智能修补系统,包括:底架单元、沥青路面开槽单元、沥青路面修补料拌合单元和控制单元;沥青路面开槽单元和沥青路面修补料拌合单元分别固定在底架单元上,控制单元与沥青路面开槽单元和沥青路面修补料拌合单元分别连接;
4、其中,沥青路面开槽单元包括:设置在底架单元下方的十字滑台和十字滑轨,所述十字滑台能够沿十字滑轨移动;十字滑台上分别设有摄像模块和液压升降模块,所述液压升降模块连接切割模块,并能够带动切割模块上下移动;
5、所述控制单元基于沥青路面表面图像信息识别出裂缝,根据裂缝像素点对的分布情况,拟合裂缝函数曲线;根据拟合曲线曲率分段规划裂缝槽的开槽轨迹和开槽深度。
6、可选的,所述沥青路面修补料拌合单元包括:设置在底架单元上方的搅拌桶、搅拌刀具和输料管;搅拌刀具能够在电机的驱动下在搅拌桶内转动,输料管与搅拌桶连接,用于向外输料。
7、可选的,所述控制单元接收摄像模块获取的沥青路面表面图像信息,进行沥青路面裂缝图像识别;具体过程如下:
8、对接收的沥青路面表面图像进行预处理,预处理后的图像输入至训练好的裂缝识别模型,得到裂缝识别结果;
9、其中,所述裂缝识别模型的训练过程为:
10、分别构建简单裂缝数据集和复杂裂缝数据集,首先利用简单裂缝数据集对裂缝识别模型进行训练,然后利用复杂裂缝数据集对裂缝识别模型进行训练。
11、可选的,控制单元根据裂缝像素点对的分布情况,拟合裂缝函数曲线,具体为:
12、将检测到的裂缝像素点的坐标对从图像中提取出来,以裂缝分叉处为节点,将分叉裂缝分割为多个小段;
13、使用最小二乘法对每个小段的沥青路面裂缝函数曲线进行初步拟合,遍历所有像素点对,剔除其中的异常值;
14、使用支持向量回归算法重新对每个小段的沥青路面裂缝函数曲线进行拟合,以支持向量回归算法边界带作为沥青路面裂缝和其余区域的分界线。
15、可选的,根据拟合曲线曲率分段规划裂缝槽的开槽轨迹和开槽深度,具体为:
16、对支持向量回归算法的回归曲线上各点的曲率进行计算,将曲线中曲率大于设定阈值的点设定为拐点;
17、以拐点为分界线将沥青路面裂缝分割为数个小段,得到多段裂缝区域;
18、绘制每段裂缝区域的最小外接矩形作为裂缝槽的轮廓;
19、确定像素尺寸与实际尺寸得换算比例,根据支持向量回归算法中拟合曲线回归带的宽度,判断路面裂缝对结构层的损伤程度进而向用户推荐裂缝槽的开槽深度。
20、可选的,所述控制单元根据开槽轨迹和开槽深度,驱动沥青路面开槽单元的十字滑台和液压升降模块进行移动;
21、驱动过程中将切割模块中的切割刀和摄像模块中的摄像头的坐标进行统一:
22、
23、其中,tab表示坐标转化矩阵;d1表示切割刀和摄像头之间的距离,切割刀和摄像头的长度分别为l1和l2,液压升降模块中液压杆的长度为l3,切割刀在基座坐标系中沿xyz各轴的移动量分别为dx、dy、dz。
24、可选的,所述控制单元内存储有不同有色染料掺量下,沥青路面修补料在rgb空间的像素值对应表;
25、控制单元计算当前区域的路面像素平均值,根据当前区域路面像素平均值、开槽面积与深度,确定有色染料和沥青路面修补料的用量。
26、在另一些实施方式中,采用如下技术方案:
27、一种基于图像识别的路面裂缝无色差智能修补方法,包括:
28、获取沥青路面表面图像信息,并进行预处理;
29、基于所述图像信息,利用训练好的裂缝识别模型,得到裂缝识别结果;
30、基于裂缝识别结果,根据裂缝像素点对的分布情况,拟合裂缝函数曲线;根据拟合曲线曲率分段规划裂缝槽的开槽轨迹和开槽深度;
31、根据开槽轨迹和开槽深度,驱动沥青路面开槽单元的十字滑台和液压升降模块进行移动,从而带动切割刀沿着开槽轨迹和开槽深度进行开槽切割;
32、计算当前区域的路面像素平均值,根据当前区域路面像素平均值、开槽面积与深度,确定有色染料和沥青路面修补料的用量;按照所述用量混合有色染料和沥青路面修补料,以实现沥青路面的无色差修补。
33、可选的,计算当前区域的路面像素平均值,根据当前区域路面像素平均值、开槽面积与深度,确定有色染料和沥青路面修补料的用量,具体过程为:
34、将从沥青路面表面图像中分割出的裂缝区域去除,计算其余区域的像素平均值;
35、将多帧图像计算得到的像素平均值取平均,得到最终的路面像素平均值;
36、对沥青路面表面图像在rgb三个通道分别进行线性插值运算,计算出三个有色染料掺合量,使用加权求平均值的方法计算出最终得有色染料得掺和比例;基于裂缝槽得开槽宽度和长度,计算沥青修补料得用量,进而根据掺和比例确定有色染料的用量。
37、可选的,根据拟合曲线曲率分段规划裂缝槽的开槽轨迹和开槽深度,具体为:
38、对支持向量回归算法的回归曲线上各点的曲率进行计算,将曲线中曲率大于设定阈值的点设定为拐点;
39、以拐点为分界线将沥青路面裂缝分割为数个小段,得到多段裂缝区域;
40、绘制每段裂缝区域的最小外接矩形作为裂缝槽的轮廓;
41、确定像素尺寸与实际尺寸的换算比例,根据支持向量回归算法中拟合曲线回归带的宽度,判断路面裂缝对结构层的损伤程度进而向用户推荐裂缝槽的开槽深度。
42、与现有技术相比,本发明的有益效果是:
43、(1)本发明基于图像识别的路面裂缝无色差智能修补系统,集裂缝识别、开槽轨迹确定以及修补材料的用量计算等功能为一体,能够自动控制切割刀按照确定的开槽轨迹和深度进行开槽切割,实现沥青路面裂缝的智能识别和修补。
44、(2)本发明根据裂缝的形状切割裂缝槽,降低了开槽修补方法对路面结构的损坏,减少的修补材料的用量。
45、(3)本发明基于开槽的面积和深度,通过自动识别路面的像素,自动确定修补材料和有色染料的掺杂比例及用量,能够使得修补后的路面区域与原路面区域的颜色保持一致,实现无色差自动修补。
46、本发明的其他特征和附加方面的优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本方面的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!