可调整的垃圾聚集方法及系统与流程
本发明涉及环卫的,具体地,涉及可调整的垃圾聚集方法及系统,尤其涉及一种搭载于(可移动或固定)平台通过传感器感知、智能算法研判、多自由度(包含双自由度)吹风装置执行的垃圾聚集系统。
背景技术:
1、随着我国经济的高速发展,原有的城市也在急速扩展,城市人口激增,城市垃圾也随之剧增。目前,垃圾收集,特别是散乱的垃圾收集是比较困难的,散乱垃圾的收集率低下,不便于垃圾的集中处理,且散乱垃圾的收集效率也低,进而影响城市的垃圾收集工作,因此,目前的垃圾收集存在散乱垃圾收集率低、收集效率低下的问题。
2、因此,需要提出一种新的技术方案以改善上述技术问题。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种可调整的垃圾聚集方法及系统。
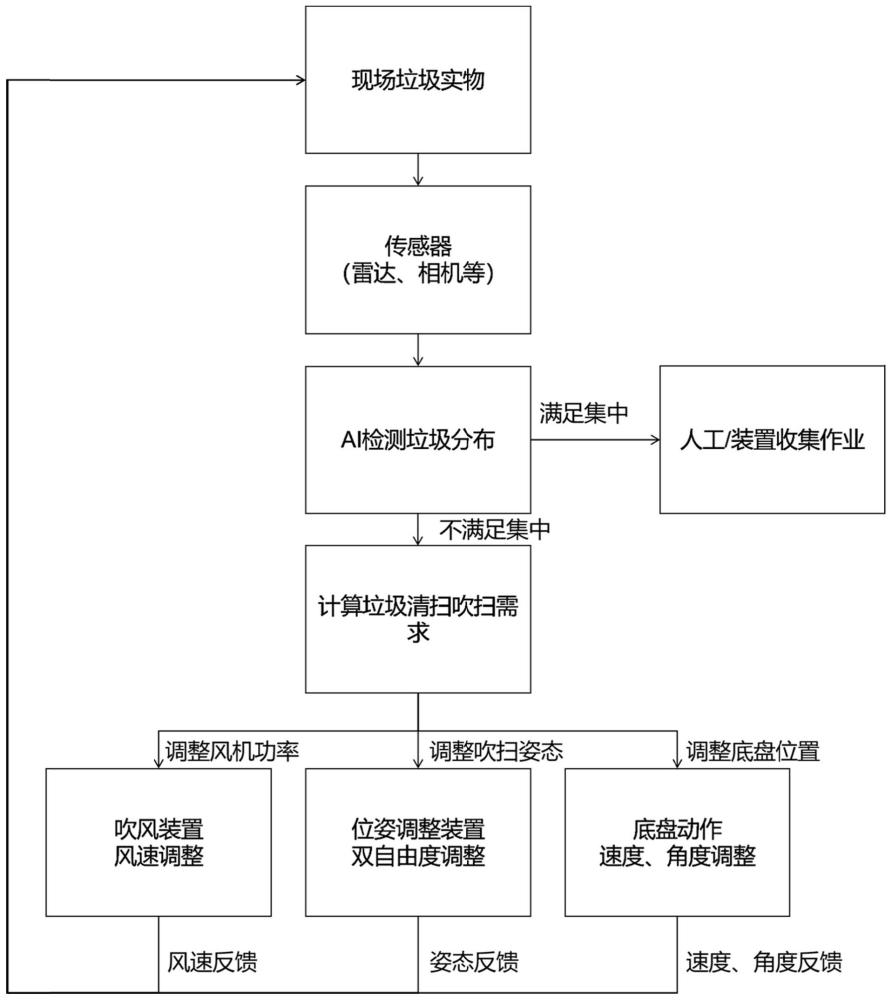
2、根据本发明提供的一种可调整的垃圾聚集方法,所述方法包括如下步骤:
3、步骤s1:传感器扫描周围环境并收集垃圾数据;
4、步骤s2:主控制器智能算法处理垃圾数据,识别垃圾并确定其在环境中的位置、与吹风装置的相对位置、所需吹风装置的强度、姿态;
5、步骤s3:根据主控制器智能算法的决策,控制吹风装置以及底盘执行动作,将垃圾吹到指定区域;
6、步骤s4:主控制器进行算法闭环调节;
7、步骤s5:当垃圾被吹到指定区域后,垃圾收集装置或人工进行最终的垃圾清理工作。
8、优选地,所述步骤s1中的传感器用于检测和识别垃圾物体以及周围环境;所述传感器包括但不局限于相机、雷达,传感器可组合用亦可单独使用,所述传感器为主控制器提供数据。
9、优选地,所述步骤s2包括如下步骤:
10、步骤s2.1:通过获取的传感器信息,获取出当前垃圾的分布,垃圾分布包括但不限于类别和位置信息;
11、步骤s2.2:根据垃圾分布信息选择确定垃圾子集作为当前作业的目标垃圾;
12、步骤s2.3:根据所需吹风强度及姿态,计算出吹风装置及、或底盘的指令,指令包括但不限于轨迹、姿态、速度、功率。
13、优选地,所述步骤s3包括如下步骤:
14、步骤s3.1:吹风装置控制器接受下发的初始姿态信息控制吹风装置进行位姿调整,接受下发的风力请求控制吹风装置的风速,并上报吹风装置位姿、风速;
15、步骤s3.2:位姿调整装置通过角度控制模式或方向控制模式对吹风装置进行位姿调整;
16、步骤s3.3:若要求吹风装置保持在某个固定的角度位置时,吹风装置控制器获取当前的角度数据,并根据这个数据来控制位姿调整驱动装置的方向和速度,保持吹风机的位姿不变;如果检测到有外部干扰,吹风装置的角度发生变化,吹风装置控制器调整位姿调整驱动装置的方向和速度来纠正偏差。
17、优选地,所述步骤s3.1中的吹风位姿调整装置包括第一位姿调整驱动装置和第二位姿调整驱动装置;第一位姿调整驱动装置用于调整吹风装置左右方向的位置;第二位姿调整驱动装置用于调整吹风装置上下方向的位置;
18、所述步骤s3.2包括如下步骤:
19、步骤s3.2.1:在角度控制模式下,所述主控制器根据吹风装置的目标角度,计算吹风装置的当前角度与目标角度之间的差值,通过控制第一位姿调整驱动装置和第二位姿调整驱动装置的方向和速度对吹风装置的位姿进行调整,直到达到目标角度;
20、步骤s3.2.2:在方向控制模式下,所述主控制器直接根据输入的方向数据和速度数据控制第一位姿调整驱动装置和第二位姿调整驱动装置的方向和速度对吹风装置的位姿进行调整,直到达到目标位置。
21、优选地,所述步骤s4包括如下步骤:
22、步骤s4.1:根据传感器获取到目标垃圾分布信息来调整吹风装置及或底盘;
23、步骤s4.2:调整吹风装置及或底盘后,重新检测垃圾分布,根据历史时刻以及当前时刻的目标垃圾分布判定垃圾是否有效移动垃圾;
24、步骤s4.3:当目标垃圾分布发生变化时,根据新的新的分布来调整吹风装置及、或底盘,使得垃圾有效移动至指定区域;
25、步骤s4.4:当目标垃圾分布未发生变化时,调整吹风强度对该目标垃圾进行重点清理;调整吹风强度的方式包括但不限于移动底盘至该垃圾的更近位置、调整风机的功率,改变吹风方向;
26、步骤s4.5:循环执行步骤s3,直到目标垃圾被吹到指定区域。
27、本发明还提供一种可调整的垃圾聚集系统,所述系统包括如下模块:
28、模块m1:传感器扫描周围环境并收集垃圾数据;
29、模块m2:主控制器智能算法处理垃圾数据,识别垃圾并确定其在环境中的位置、与吹风装置的相对位置、所需吹风装置的强度、姿态;
30、模块m3:根据主控制器智能算法的决策,控制吹风装置以及底盘执行动作,将垃圾吹到指定区域;
31、模块m4:主控制器进行算法闭环调节;
32、模块m5:当垃圾被吹到指定区域后,垃圾收集装置或人工进行最终的垃圾清理工作。
33、优选地,所述模块m1中的传感器用于检测和识别垃圾物体以及周围环境;所述传感器包括但不局限于相机、雷达,传感器可组合用亦可单独使用,所述传感器为主控制器提供数据;
34、所述模块m2包括如下模块:
35、模块m2.1:通过获取的传感器信息,获取出当前垃圾的分布,垃圾分布包括但不限于类别和位置信息;
36、模块m2.2:根据垃圾分布信息选择确定垃圾子集作为当前作业的目标垃圾;
37、模块m2.3:根据所需吹风强度及姿态,计算出吹风装置及、或底盘的指令,指令包括但不限于轨迹、姿态、速度、功率。
38、优选地,所述模块m3包括如下模块:
39、模块m3.1:吹风装置控制器接受下发的初始姿态信息控制吹风装置进行位姿调整,接受下发的风力请求控制吹风装置的风速,并上报吹风装置位姿、风速;
40、模块m3.2:位姿调整装置通过角度控制模式或方向控制模式对吹风装置进行位姿调整;
41、模块m3.3:若要求吹风装置保持在某个固定的角度位置时,吹风装置控制器获取当前的角度数据,并根据这个数据来控制位姿调整驱动装置的方向和速度,保持吹风机的位姿不变;如果检测到有外部干扰,吹风装置的角度发生变化,吹风装置控制器调整位姿调整驱动装置的方向和速度来纠正偏差。
42、优选地,所述模块m3.1中的吹风位姿调整装置包括第一位姿调整驱动装置和第二位姿调整驱动装置;第一位姿调整驱动装置用于调整吹风装置左右方向的位置;第二位姿调整驱动装置用于调整吹风装置上下方向的位置;
43、所述模块m3.2包括如下模块:
44、模块m3.2.1:在角度控制模式下,所述主控制器根据吹风装置的目标角度,计算吹风装置的当前角度与目标角度之间的差值,通过控制第一位姿调整驱动装置和第二位姿调整驱动装置的方向和速度对吹风装置的位姿进行调整,直到达到目标角度;
45、模块m3.2.2:在方向控制模式下,所述主控制器直接根据输入的方向数据和速度数据控制第一位姿调整驱动装置和第二位姿调整驱动装置的方向和速度对吹风装置的位姿进行调整,直到达到目标位置;
46、所述模块m4包括如下模块:
47、模块m4.1:根据传感器获取到目标垃圾分布信息来调整吹风装置及或底盘;
48、模块m4.2:调整吹风装置及或底盘后,重新检测垃圾分布,根据历史时刻以及当前时刻的目标垃圾分布判定垃圾是否有效移动垃圾;
49、模块m4.3:当目标垃圾分布发生变化时,根据新的新的分布来调整吹风装置及、或底盘,使得垃圾有效移动至指定区域;
50、模块m4.4:当目标垃圾分布未发生变化时,调整吹风强度对该目标垃圾进行重点清理;调整吹风强度的方式包括但不限于移动底盘至该垃圾的更近位置、调整风机的功率,改变吹风方向;
51、模块m4.5:循环执行步骤s3,直到目标垃圾被吹到指定区域。
52、与现有技术相比,本发明具有如下的有益效果:
53、1、本发明提高散乱垃圾的收集率,便于集中处理;
54、2、本发明提高散乱垃圾的收集效率;
55、3、本发明通过获取的传感器信息,识别出当前垃圾的信息和所需吹风力度;通过获取的传感器信息确定该垃圾在环境中的位置;根据垃圾目标集合位置与垃圾绝对位置计算出吹风装置的合理位姿和轨迹;
56、4、本发明的模块化产品,可搭载不同硬件平台(可移动式/固定式),可移植性高;
57、5、本发明减少了对大量人工清理作业的需求,从而节约了人力成本;意味着可以在无人值守或最少监管的情况下连续工作,这在实际运营中可以节省显著的劳动成本;
58、6、本发明设计为高度灵活和适用于不同的环境和垃圾类型;无论是城市街道、公园还是其他公共场所,都可以根据实际需求调整设备的使用。
- 还没有人留言评论。精彩留言会获得点赞!