一种巡检机器人的制作方法
[0001]
本申请属于巡检领域,尤其涉及一种巡检机器人。
背景技术:
[0002]
随着技术的不断发展,人们的生活越来越便利,越来越多的领域可以由机器人代替人类的工作,但仍然有很多领域没有由机器人替代人类,如:巡检领域,通常还是靠人工进行。但是人工巡检不仅浪费大量昂贵的人工成本,而且人工巡检的效率也不高。
技术实现要素:
[0003]
本实用新型实施例的主要目的在于提供一种巡检机器人,通过本实用新型实施例的方案,可以节省巡检成本,提升巡检的效率。
[0004]
第一方面,提供了一种巡检机器人,包括:
[0005]
底盘、设置于所述底盘上的车轮、驱动装置、处理装、供能装置、激光雷达、深度相机,所述供能装置为所述分别为所述车轮、处理装置、激光雷达、深度相机提供电能,激光雷达用于获取环境信息、深度相机用于获取人脸信息,处理装置用于根据所述环境信息生成对巡检机器人的移动指令,根据所述人脸信息进行人脸识别,车轮根据所述移动指令进行移动。
[0006]
在一个可能的实现方式中,所述供能装置为锂电池。
[0007]
在另一个可能的实现方式中,所述巡检机器人还包括充电装置,用于为所述供能装置充电。
[0008]
在又一个可能的实现方式中,所述车轮为麦克纳姆轮。
[0009]
在又一个可能的实现方式中,所述巡检机器人还包括急停装置,所述急停装置设置于底盘上,用于在自主导航机器人出现紧急情况时进行制动。
[0010]
在又一个可能的实现方式中,所述巡检机器人还包括设置于底盘上的高度支架,所述激光雷达和深度相机可设置于高度支架之上。
[0011]
在又一个可能的实现方式中,所述高度支架为可伸缩支架。
[0012]
在又一个可能的实现方式中,如果所述人脸识别的结果为异常,所述处理装置调用语音识别模块,通过问答、口令、语音信息方式进行身份识别。
[0013]
本申请提供的技术方案带来的有益效果是:可以节省巡检成本,提升巡检的效率。
附图说明
[0014]
为了更清楚地说明本申请实施例中的技术方案,下面将对本申请实施例描述中所需要使用的附图作简单地介绍。
[0015]
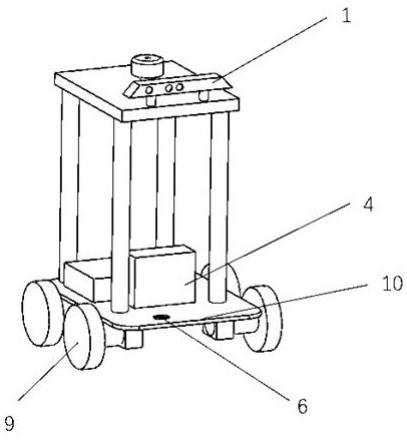
图1、图2为本实用新型一个实施例提供的一种巡检机器人的结构图。
[0016]
图中:1-深度相机;2-激光雷达;3-高度支架;4-供能装置;5-处理装置;6-急停装置;7-充电装置;8-驱动装置;9-车轮;10-底盘。
具体实施方式
[0017]
下面详细描述本申请的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的模块或具有相同或类似功能的模块。下面通过参考附图描述的实施例是示例性的,仅用于解释本申请,而不能解释为对本实用新型的限制。
[0018]
本技术领域技术人员可以理解,除非特意声明,这里使用的单数形式“一”、“一个”、“所述”和“该”也可包括复数形式。应该进一步理解的是,本申请的说明书中使用的措辞“包括”是指存在所述特征、整数、步骤、操作、模块和/或组件,但是并不排除存在或添加一个或多个其他特征、整数、步骤、操作、模块、组件和/或它们的组。应该理解,当我们称模块被“连接”或“耦接”到另一模块时,它可以直接连接或耦接到其他模块,或者也可以存在中间模块。此外,这里使用的“连接”或“耦接”可以包括无线连接或无线耦接。这里使用的措辞“和/或”包括一个或更多个相关联的列出项的全部或任一单元和全部组合。
[0019]
为使本申请的目的、技术方案和优点更加清楚,下面将结合附图对本申请实施方式作进一步地详细描述。
[0020]
下面以具体地实施例对本申请的技术方案以及本申请的技术方案如和解决上述技术问题进行详细说明。下面这几个具体的实施例可以相互结合,对于相同或相似的概念或过程可能在某些实施例中不再赘述。下面将结合附图,对本申请的实施例进行描述。
[0021]
实施例一
[0022]
如图1、图2所示为本实用新型一个实施例提供的一种巡检机器人的结构图,包括:
[0023]
底盘10、设置于所述底盘10上的车轮9、驱动装置8、处理装置5、供能装置4、激光雷达2、深度相机1,所述供能装置4为所述分别为所述车轮9、处理装置5、激光雷达2、深度相机1提供电能,激光雷达2用于获取环境信息、深度相机1用于获取人脸信息,处理装置5用于根据所述环境信息生成对巡检机器人的移动指令,根据所述人脸信息进行人脸识别,车轮9和驱动装置8根据所述移动指令进行移动。
[0024]
在本实用新型实施例中,巡检机器人包括:底盘、设置于底盘上的车轮、处理装置、供能装置、激光雷达、深度相机,所述供能装置为所述分别为所述车轮、处理装置、激光雷达、深度相机提供电能,激光雷达用于获取环境信息、深度相机用于获取人脸信息,处理装置用于根据所述环境信息生成对巡检机器人的移动指令,根据所述人脸信息进行人脸识别,车轮根据所述移动指令进行移动。
[0025]
供能装置是整个巡检机器人的供能设备,其为巡检机器人的移动、人脸识别、环境信息采集等功能提供了充足的电能,该供能装置为蓄电池,同时在巡检机器人上还设置有充电装置7,通过该充电装置可以为供能装置进行充电,保证巡检机器人持久、反复的运行。
[0026]
车轮是整个巡检机器人移动的基础,处理装置生成的移动指令会发送到车轮,车轮根据该移动指令实现巡检机器人的移动。需要指出的是,对于车轮的种类,可以根据实际使用的需要进行设置,本实用新型不做限定。优选的,所述车轮为麦克纳姆轮。
[0027]
深度相机可以在巡检机器人运行时,实时采集周围行人的人脸信息,并将人脸信息传送到处理装置,通过处理装置中的数据库对采集的人脸信息进行比对识别,起到巡检机器人自动巡检的作用。
[0028]
激光雷达在巡检机器人启动后,实时采集周围的环境信息,将采集的环境信息发送到处理装置,处理装置根据该环境信息判断周围的环境,生成移动指令。
[0029]
处理装置是整个巡检机器人的核心,在处理装置上设置有深度学习模块、人脸信息数据库和语音识别模块。深度学习模块可以对周围环境进行深度学习,根据不同的环境生成不同的移动指令,当接收到激光雷达发送的真实环境信息时,根据该真实环境信息生成移动指令。人脸信息数据库中保存了大量的人脸数据,当接收到深度相机发送的人脸信息时,将人脸信息与人脸数据进行比对,实现人脸识别,当人脸识别的结果为异常时,开启语音识别模块,通过问答、口令、语音信息等方式实现巡检的目的。
[0030]
巡检机器人还设置有急停装置6,所述急停装置设置于底盘10上,用于在自主导航机器人出现紧急情况时进行制动,保证自主的导航机器人的运行。
[0031]
巡检机器人还包括设置于底盘10上的高度支架3,激光雷达和深度相机可设置于高度支架之上。激光雷达和深度相机设置到高度支架上可以提高激光雷达和深度相机的视野,扩大收集环境数据和人脸信息的范围。该高度支架为可伸缩支架。
[0032]
本实用新型实施例,在机器人上设置激光雷达、深度相机,通过深度相机采集人脸信息,通过激光雷达采集环境信息,将人脸信息发送到处理装置进行人脸识别,将环境信息发送到处理装置实现机器人的自动移动,提供了一种自动移动自动巡检的机器人,节省了人力巡检的成本,提升了巡检的效率。
[0033]
应该理解的是,虽然附图的流程图中的各个步骤按照箭头的指示依次显示,但是这些步骤并不是必然按照箭头指示的顺序依次执行。除非本文中有明确的说明,这些步骤的执行并没有严格的顺序限制,其可以以其他的顺序执行。而且,附图的流程图中的至少一部分步骤可以包括多个子步骤或者多个阶段,这些子步骤或者阶段并不必然是在同一时刻执行完成,而是可以在不同的时刻执行,其执行顺序也不必然是依次进行,而是可以与其他步骤或者其他步骤的子步骤或者阶段的至少一部分轮流或者交替地执行。
[0034]
以上所述仅是本实用新型的部分实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1