一种高强度高韧度泡壳的抓取机械臂的制作方法
[0001]
本实用新型涉及泡壳加工配件技术领域,更具体地说,本实用新型涉及一种高强度高韧度泡壳的抓取机械臂。
背景技术:
[0002]
泡壳是采用吸塑工艺将透明的塑料硬片制成特定凸起形状的透明塑料,罩于产品表面,能起到保护和美化产品的作用。又名泡罩、真空罩。
[0003]
随着塑料产业的不断进步和发展,高强度高韧度泡壳越来越多的应用在我们日常生活中,在对高强度高韧度泡壳生产过程中,在生产线上生产的泡壳通常都需要抓取机械臂将其抓取并传输,确保自动化加工程序,但是泡壳的型号大小不同,需要备用不同大小的机械臂进行调节使用,更换安装操作麻烦,因此,发明一种高强度高韧度泡壳的抓取机械臂很有必要。
技术实现要素:
[0004]
为了克服现有技术的上述缺陷,本实用新型的实施例提供一种高强度高韧度泡壳的抓取机械臂。
[0005]
为实现上述目的,本实用新型提供如下技术方案:一种高强度高韧度泡壳的抓取机械臂,包括定位管和顶管,所述顶管设置于定位管顶部且与定位管连通,所述定位管内部活动连接有升降座,所述升降座顶部设有活动柱,所述活动柱由纯铁材料制成,所述顶管内壁顶部设有套圈,所述活动柱设置于套圈内部,所述升降座底部表面固定设有调节座,所述调节座外侧均匀设有连接板,所述调节座底部表面设有底板,所述连接板顶部设有活动杆。
[0006]
在一个优选地实施方式中,所述定位管外侧均匀设有定位座,所述定位座与连接板数量相同,所述活动杆设置于定位座和连接板之间,所述活动杆内部设有滑动板且滑动板与活动杆滑动连接,所述活动杆数量设置为两个且设置于定位座和连接板外侧,所述活动杆外侧设有定位螺钉进行安装。
[0007]
在一个优选地实施方式中,所述顶管顶部表面设有连接座,所述顶管内壁两侧均设有蓄电池,所述蓄电池设置于套圈外侧。
[0008]
在一个优选地实施方式中,所述升降座顶部表面设有安装座,所述活动柱与安装座螺纹连接,所述连接板底部固定设有抓取臂,所述抓取臂为弯曲设置且内壁表面设有防滑垫。
[0009]
在一个优选地实施方式中,所述套圈表面环绕设有电磁线圈,所述套圈内部设有通槽,所述活动柱与通槽插接,所述电磁线圈外侧连接有接线口,所述接线口通过传输线缆与蓄电池连通。
[0010]
在一个优选地实施方式中,所述调节座内部设有承载座,所述调节座外侧设有调节板,所述调节板与承载座之间设有电动推杆,所述连接板设置于调节板外侧。
[0011]
在一个优选地实施方式中,所述底板底部表面固定设有真空发生器,所述真空发
生器底部设有真空吸盘,所述真空吸盘通过通气管与真空发生器输出端连通。
[0012]
本实用新型的技术效果和优点:
[0013]
1、本实用新型通过设有调节座和底板,根据所需抓取的泡壳大小不同调节电动推杆工作,电动推杆推动调节板移动从而可以调整连接板之间的距离,能够针对泡壳大小进行针对性抓取,调节简单方便,在抓取过程中连接板底部的抓取臂贴近泡壳,真空发生器工作通过真空吸盘将泡壳吸附起来后抓取臂再进行抓取工作,能够确保多个抓取臂稳定将泡壳抓取,避免抓取移动过程中泡壳掉落,工作效率高;
[0014]
2、通过设有套圈、活动柱和升降座,活动柱在套圈内部,对套圈表面的电磁线圈通电后可以将活动柱向上吸附,活动柱带动其底部的升降座向上移动,移动的过程中连接板底部的抓取臂向内侧收拢,从而进行抓取工作,到达抓取位置时缓慢减少供电功率,活动柱受重力作用缓慢向下移动,抓取臂向外侧张开,其抓取的泡壳也随之掉落至所需移送位置,工作简单,所需功率低,能够长时间的高效工作。
附图说明
[0015]
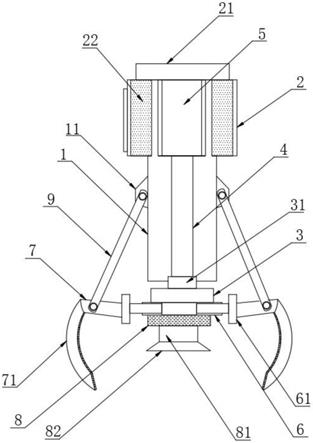
图1为本实用新型的整体结构示意图。
[0016]
图2为本实用新型的套圈结构示意图。
[0017]
图3为本实用新型的调节座结构示意图。
[0018]
图4为本实用新型的活动杆结构示意图。
[0019]
附图标记为:1定位管、11定位座、2顶管、21连接座、22蓄电池、3升降座、31安装座、4活动柱、5套圈、51电磁线圈、52通槽、53接线口、6调节座、61调节板、62 电动推杆、7连接板、71抓取臂、8底板、81真空发生器、82真空吸盘、9活动杆、91滑动板。
具体实施方式
[0020]
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
[0021]
根据图1-4所示的一种高强度高韧度泡壳的抓取机械臂,包括定位管1和顶管2,顶管2设置于定位管1顶部且与定位管1连通,定位管1内部活动连接有升降座3,升降座 3顶部设有活动柱4,活动柱4由纯铁材料制成,顶管2内壁顶部设有套圈5,活动柱4设置于套圈5内部,升降座3底部表面固定设有调节座6,调节座6外侧均匀设有连接板7,调节座6底部表面设有底板8,连接板7顶部设有活动杆9。
[0022]
定位管1外侧均匀设有定位座11,定位座11与连接板7数量相同,活动杆9设置于定位座11和连接板7之间,活动杆9内部设有滑动板91且滑动板91与活动杆9滑动连接,活动杆9数量设置为两个且设置于定位座11和连接板7外侧,活动杆9外侧设有定位螺钉进行安装,活动杆9和滑动板91对连接板7的位置进行限定。
[0023]
顶管2顶部表面设有连接座21,顶管2内壁两侧均设有蓄电池22,蓄电池22设置于套圈5外侧,由连接座21安装移动机构或升降机构,带动整体进行升降或移动。
[0024]
升降座3顶部表面设有安装座31,活动柱4与安装座31螺纹连接,连接板7底部固定
设有抓取臂71,抓取臂71为弯曲设置且内壁表面设有防滑垫,防滑垫可以增加与泡壳之间的摩擦力,避免泡壳掉落。
[0025]
套圈5表面环绕设有电磁线圈51,套圈5内部设有通槽52,活动柱4与通槽52插接,电磁线圈51外侧连接有接线口53,接线口53通过传输线缆与蓄电池22连通,对套圈5 表面的电磁线圈51通电后可以将活动柱向上吸附,活动柱4带动其底部的升降座3向上移动,移动的过程中连接板7底部的抓取臂71向内侧收拢,从而进行抓取工作。
[0026]
调节座6内部设有承载座,调节座6外侧设有调节板61,调节板61与承载座之间设有电动推杆62,连接板7设置于调节板61外侧,根据所需抓取的泡壳大小不同调节电动推杆62工作,电动推杆62推动调节板61移动从而可以调整连接板7之间的距离,能够针对泡壳大小进行针对性抓取。
[0027]
底板8底部表面固定设有真空发生器81,真空发生器81底部设有真空吸盘82,真空吸盘82通过通气管与真空发生器81输出端连通,真空发生器81工作通过真空吸盘82将泡壳吸附起来后抓取臂71再进行抓取工作,能够确保多个抓取臂71稳定将泡壳抓取,避免抓取移动过程中泡壳掉落。
[0028]
本实用新型工作原理:
[0029]
参照说明书附图1和图3:根据所需抓取的泡壳大小不同调节电动推杆62工作,电动推杆62推动调节板61移动从而可以调整连接板7之间的距离,在抓取过程中连接板7底部的抓取臂71贴近泡壳,真空发生器81工作通过真空吸盘82将泡壳吸附起来后抓取臂 71再进行抓取工作,能够确保多个抓取臂71稳定将泡壳抓取,避免抓取移动过程中泡壳掉落,工作效率高;
[0030]
参照说明书附图1、图2和图4:活动柱4在套圈5内部,对套圈5表面的电磁线圈 51通电后可以将活动柱向上吸附,活动柱4带动其底部的升降座3向上移动,移动的过程中连接板7底部的抓取臂71向内侧收拢,从而进行抓取工作,到达抓取位置时缓慢减少供电功率,活动柱4受重力作用缓慢向下移动,抓取臂71向外侧张开,其抓取的泡壳也随之掉落至所需移送位置,工作简单,所需功率低,能够长时间的高效工作。
[0031]
最后应说明的几点是:首先,在本申请的描述中,需要说明的是,除非另有规定和限定,术语“安装”、“相连”、“连接”应做广义理解,可以是机械连接或电连接,也可以是两个元件内部的连通,可以是直接相连,“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变,则相对位置关系可能发生改变;
[0032]
其次:本实用新型公开实施例附图中,只涉及到与本公开实施例涉及到的结构,其他结构可参考通常设计,在不冲突情况下,本实用新型同一实施例及不同实施例可以相互组合;
[0033]
最后:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1