具有密封结构的机器人的制作方法
[0001]
本实用新型涉及机器人技术领域,特别涉及一种具有密封结构的机器人。
背景技术:
[0002]
移动机器人已逐步应用于大众服务场景中。例如,在餐厅、写字楼、酒店中提供配送服务。现有技术中,机器人通常具有移动底盘,移动底盘驱动机器人移动。机器人的底盘通常设置核心电子器件,长期工作的机器人可能会由于外部杂质进入底盘导致出现机械故障或者电子故障。
技术实现要素:
[0003]
本实用新型有鉴于上述的现有状况而完成的,其目的在于提供一种具有密封结构的机器人,可防止杂质进入移动底盘。
[0004]
为了实现上述目的,本实用新型实施方式提供如下技术方案:
[0005]
本实用新型提供一种具有密封结构的机器人,包括:
[0006]
移动底盘和设置于所述移动底盘的机器人本体,所述移动底盘包括底盘组件、若干移动轮、密封件以及密封罩,所述底盘组件的两侧设置安装口,所述移动轮设置于所述安装口,所述密封罩盖装于所述安装口,所述密封件设置于所述移动底盘的前部。
[0007]
其中,所述移动底盘还包括激光雷达,所述激光雷达设置于所述前部。
[0008]
其中,所述密封件包括第一板体、第二板体以及连接所述第一板体和所述第二板体的第三板体,所述第一板体和所述第二板体平行设置,所述激光雷达至少一部分设置于所述第一板体和所述第二板体之间。
[0009]
其中,所述第三板体分别垂直连接所述第一板体和所述第二板体的边缘,所述第三板体包括若干开口。
[0010]
其中,所述移动底盘还包括支撑框架,所述支撑框架设置于所述底盘组件,所述第三板体固定于所述支撑框架。
[0011]
其中,所述支撑框架的两侧对称设置两个支撑柱,所述机器人本体固定于所述支撑柱。
[0012]
其中,所述移动轮包括两组,两组所述移动轮分别设置于所述移动底盘的前部和后部,所述移动底盘的中部设置一对驱动轮,所述驱动轮分别设置在所述移动底盘的两侧。
[0013]
其中,所述密封件设置于所述驱动轮的前方。
[0014]
其中,所述密封罩呈圆柱状。
[0015]
其中,所述机器人本体设置多层托盘。
[0016]
根据本实用新型提供的具有密封结构的机器人,通过设置密封件及密封罩可防止老鼠、昆虫等从机器人的底盘外部进入底盘内部,避免了机器人因杂质进入内部造成的机械或者电子故障。
附图说明
[0017]
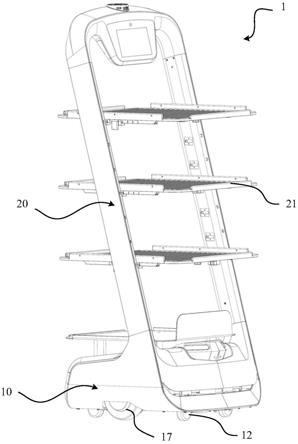
图1示出了本实用新型的实施方式所涉及的具有密封结构的机器人的立体结构示意图;
[0018]
图2示出了本实用新型的实施方式所涉及的具有密封结构的机器人的移动底盘的立体结构示意图;
[0019]
图3示出了本实用新型的实施方式所涉及的具有密封结构的机器人的密封件的立体结构示意图。
具体实施方式
[0020]
以下,参考附图,详细地说明本实用新型的优选实施方式。在下面的说明中,对于相同的部件赋予相同的符号,省略重复的说明。另外,附图只是示意性的图,部件相互之间的尺寸的比例或者部件的形状等可以与实际的不同。
[0021]
如图1和图2所示,本实用新型提供一种具有密封结构的机器人1,用于执行配送任务。机器人1包括移动底盘10和设置于移动底盘10的机器人本体20。移动底盘10包括底盘组件11、若干移动轮12、密封件13以及密封罩14。底盘组件11的两侧设置安装口111。移动轮12设置于安装口111。密封罩14盖装于安装口111。密封件13设置于移动底盘10的前部。在这种情况下,通过设置密封件及密封罩可防止老鼠、昆虫等从机器人的底盘外部进入底盘内部,避免了机器人因杂质进入内部造成的机械或者电子故障。
[0022]
在本实施方式中,移动底盘10设置电子器件,包括但不限于集成电路、计算机存储设备、运算处理器等器件。
[0023]
在本实施方式中,底盘组件11可以大体呈矩形。底盘组件11可以非平坦的板体。
[0024]
在本实施方式中,机器人正常工作时前进过程中的朝向为机器人的前面。机器人靠近前面的部分为机器人的前部。
[0025]
在一些示例中,安装口111可以呈圆形。移动轮12通过支撑结构穿过安装口111伸向地面。每个安装口111可以设置一个移动轮12。
[0026]
在一些示例中,密封罩14从机器人1的上方向下罩住安装口111。由此,可以防止杂质从底盘组件11的底部进入机器人移动底盘的内部。
[0027]
在本实施方式中,移动底盘10还包括激光雷达15。激光雷达15设置于移动底盘10的前部。
[0028]
在本实施方式中,密封件13包括第一板体131、第二板体132以及连接第一板体131和第二板体132的第三板体133。第一板体131和第二板体132平行设置。激光雷达15至少一部分设置于第一板体131和第二板体132之间。在这种情况下,激光雷达设置于第一板体和第二板体之间,可以降低对激光雷达的遮挡,并且第三板体可阻挡杂质进入移动底盘内部。
[0029]
在本实施方式中,第三板体133分别垂直连接第一板体131和第二板体132的边缘。第三板体133包括若干开口1331。由此,开口可以促进空气流动,使得移动底盘内部的热量及时散出。
[0030]
在一些示例中,开口1331可以是设置于第三板体133上的镂空结构。在本实施方式中,开口1331设置于第三板体133的中部。
[0031]
在一些示例中,第一板体131可以设置开口1311。开口1311可以设置于第一板体
131的中部。
[0032]
在一些示例中,激光雷达15可以固定于底盘组件11。激光雷达15可以由底盘组件11并穿过开口1311延伸至第一板体131和第二板体132之间。
[0033]
在本实施方式中,移动底盘10还包括支撑框架16。支撑框架16设置于底盘组件11。第三板体133固定于支撑框架16。
[0034]
在本实施方式中,支撑框架16的两侧对称设置两个支撑柱161。机器人本体20固定于支撑柱161。
[0035]
在本实施方式中,移动轮12包括两组。两组移动轮12分别设置于移动底盘10的前部和后部。移动底盘10的中部设置一对驱动轮17。驱动轮17分别设置在移动底盘10的两侧。
[0036]
可以理解的是,每组移动轮12可以为两个。移动轮12两两对称设置在移动底盘10的两侧。
[0037]
在一些示例中,密封件13设置于驱动轮17的前方。这种情况下,密封件不会干扰驱动轮的转动。
[0038]
在一些示例中,密封罩14呈圆柱状。
[0039]
在本实施方式中,机器人本体20可以设置多层托盘21。托盘可以相互平行设置。
[0040]
以上所述的实施方式,并不构成对该技术方案保护范围的限定。任何在上述实施方式的精神和原则之内所作的修改、等同更换和改进等,均应包含在该技术方案的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1