获得机器人臂的机器人关节齿轮的齿轮刚度的制作方法
1.本发明涉及用于机器人臂的机器人关节齿轮,该机器人臂包括连接机器人基座和机器人工具凸缘的多个机器人关节。
背景技术:
2.包括多个机器人关节和连杆(其中马达可使关节相对于彼此旋转)的机器人臂在机器人领域中是已知的。通常,机器人臂包括用作机器人臂的安装基座的机器人基座和能够与各种工具附接的机器人工具凸缘。机器人控制器被配置为控制机器人关节,以相对于基座移动机器人工具凸缘。例如,为了指示机器人臂执行多个工作指令。
3.通常,机器人控制器被构造成基于机器人臂的动态模型控制机器人关节,其中该动态模型限定作用于机器人臂上的力与所得的机器人臂的加速度之间的关系。通常,动态模型包括机器人臂的运动学模型、关于机器人臂的惯性的知识以及影响机器人臂移动的其他参数。运动学模型限定了机器人臂的不同零件之间的几何关系,并且可包括机器人臂的信息(诸如关节和连杆的长度、尺寸),并且可(例如)由denavit
‑
hartenberg参数等来描述。动态模型使得控制器可以确定为了(例如)以指定的速度、加速度移动机器人关节或者为了将机器人臂保持在静态姿势,关节马达将提供哪些扭矩。
4.在许多机器人臂上,可以将各种端部执行器附接到机器人工具凸缘,诸如夹持器、真空夹持器、磁性夹持器、螺纹车床、焊接装备、分配系统、视觉系统等。
5.在一些机器人中,机器人关节包括关节马达,该关节马达具有被构造成经由机器人关节齿轮使输出轴旋转的马达轴。通常,输出轴连接到机器人臂的零件并且被构造成使机器人臂的零件相对于彼此旋转。机器人关节齿轮形成传动装置系统,该传动装置系统被构造成将由马达轴提供的扭矩传递到输出轴,例如以在马达轴和输出轴之间提供齿轮齿数比。机器人关节齿轮可例如被提供为正齿轮、行星齿轮、锥齿轮、蜗轮、应变波齿轮或其他类型的传动装置系统。由于各种类型的传动装置的弹性,用于工业机器人的传动装置中通常存在柔性。这种柔性可能导致机器人臂的零件的位置之间不期望的动态时变位移。
6.在动态模型中考虑齿轮柔性使得动态模型更准确地类似于真实机器人臂的动态,因为可以知道源自齿轮变形的机器人关节扭矩。更准确的动态模型例如可以允许机器人控制器以更高的准确性和精度控制机器人臂。更准确的动态模型还可以允许机器人控制器更准确地识别外部干扰,例如在安全性方面非常关注的人类干扰。
7.已经进行了研究以准确地识别机器人齿轮系统的动态特性。然而,当在机器人控制器设计中考虑关节刚度时的一个实际问题是,关节刚度随着由于齿轮啮合[1]、[2]、[3]处的材料被磨损而引起的磨损而改变。
[0008]
估计工业机器人上的关节刚度已经由若干研究者通过离线识别过程来实现。离线识别过程不是很适合于解决时变关节刚度的问题。这种过程必须不时地重新运行,以保持关节刚度信息是最新的。在离线识别过程正在运行时,机器人不能够进行任何其他任务,对用户具有明显的负面后果。尽管用于关节刚度估计的离线校准过程存在缺点,但是将对这
种用于解决机器人关节刚度估计问题的离线识别过程给出许多参考。对于关节刚度的离线识别,一种方法是一次在一个机器人关节上施加外部激励,从而导致动态模型减小,因此更容易识别,如[4]、[5]、[6]、[7]。
[0009]
另一种选择是使用外部激光跟踪传感器系统来评估关节刚度值,以便可视地跟踪对于给定施加旋量的端部执行器位移,如[8]和[9],其中所施加的旋量等于在端部执行器处施加的力和扭矩。第三种选择是在机器人关节中结合两个绝对位置旋转编码器,以能够直接测量关节偏转,然后在端部执行器处手动施加已知力,并且使用机器人臂的运动学模型(雅可比矩阵)来计算关节扭矩,如[9]。然而,这种过程需要外部的且已知的端部执行器的加载,并且不允许机器人在过程期间移动。第四种选择是使用所谓的锁定连杆关节过程来估计关节刚度,如[10],其中端部执行器被夹持到环境,并且使用马达位置测量结果和马达扭矩数据或力/扭矩传感器来测量被夹持的端部执行器与环境之间的外部旋量。
[0010]
在时变非线性刚度的在线估计上可用的工作非常少,例如awas
‑
ii关节[11]。这些工作聚焦于可变刚度执行器(vsa),如在dlr hand arm system[12](dlr institute of robotics and mechatronics)中发现的,然而,大多数工业机器人不包括vsa。在2011年,flacco和de luca[13]仅使用马达位置传感器通过基于广义动量计算动态残差,然后使用最小二乘算法估计刚度参数来估计机器人关节的非线性刚度。
[0011]
鲁棒性问题稍后在[14]中通过引入运动学卡尔曼滤波器以处理离散化和量化误差来解决,并且使用改进的递归最小二乘算法来更好地处理较差的激励条件。然而,刚度参数被假定为时不变的。在[15]中,通过使用基于能够处理时变刚度特性的qr分解(qr
‑
rls)的递归最小二乘,对刚度估计算法进行修改以处理时变刚度,从而执行对其方法的进一步改进。使用非因果savitzky
‑
golay(sg)滤波器来去除输入/输出信号上的噪声。然而,没有实验支持它们的发现。
[0012]
在2013年5月,menard等人[16]开发了一种能够在线估计vsa的时变刚度的观测器。对vsa系统的实验分析揭示了高达真实刚度的25%的参数不确定性。摩擦力被假定为纯粘性的,具有单个常数系数。这种摩擦模型不能准确地描述大多数机电系统的真实摩擦特性,因为公知的摩擦特性诸如库仑摩擦和stribeck效应则被完全忽略。
[0013]
在2013年7月,cirillo等人[17]通过使用内置于机器人关节中的光电传感器测量弹性能,证明了vsa的在线刚度估计。
技术实现要素:
[0014]
本发明的目的是解决关于现有技术的上述限制或现有技术的其他问题。这通过获得独立权利要求所限定的机器人关节齿轮的齿轮刚度的方法来实现。从属权利要求描述了根据本发明的方法的可能实施方案。在本发明的具体实施方式中描述了本发明的优点和有益效果。此外,本发明的目的通过基于所获得的齿轮刚度控制机器人臂的方法和具有被配置为基于所获得的齿轮刚度控制机器人臂的控制器的机器人臂来解决。
[0015]
考虑关节柔性的机器人控制器可以在校准之后立即执行良好,但是为了在机器人的寿命期间的良好性能,必须在线估计关节刚度。此外,在线估计关节刚度将允许在齿轮单元故障的情况下进行预测性维护。在大多数情况下,没有传感器可用于直接测量关节刚度,因此刚度信息是通过将柔性扭矩的准确模型与可用测量结果(诸如位置和力/扭矩传感器
测量值)相结合来收集的,这些测量结果可以在机器人中实现,也可以通过使用外部硬件来实现。
[0016]
本发明提供了一种获得机器人臂的机器人关节齿轮的齿轮刚度的简单方法,而不需要集成昂贵的力/扭矩传感器,因为机器人关节齿轮的关节齿轮刚度可以基于在工业机器人中常用的传感器来确定,这也使得可以将这种方法集成到具有这种传感器的现有工业机器人中。另外,齿轮刚度可以在机器人的使用期间在线获得,并且因此用作控制机器人的动态模型的输入,由此可以提供机器人的更准确控制。因此,当控制机器人时,可以考虑由于齿轮刚度引起的机器人移动的振动和不准确性。另外,主要由于机器人关节齿轮的磨损,齿轮刚度随时间变化,并且在线获得齿轮刚度使得可以基于齿轮刚度的变化来控制机器人,由此维持/提高机器人随时间的准确性。进一步地,随着时间在线获得齿轮刚度使得能够预测机器人关节齿轮的故障,因为齿轮刚度能够用于指示机器人关节齿轮何时将要发生故障。因此,可以将机器人关节齿轮送去维修,以便更换/修理机器人关节齿轮,由此可以减少机器人的计划外停机时间。
附图说明
[0017]
图1示出了被配置为获得机器人关节齿轮的齿轮刚度的机器人臂;
[0018]
图2示出了机器人关节的示意性剖视图;
[0019]
图3示出了机器人关节齿轮的模型;
[0020]
图4示出了机器人臂的简化结构图;
[0021]
图5示出了获得机器人臂的机器人关节的机器人关节齿轮的齿轮刚度的方法的流程图;
[0022]
图6示出了获得机器人臂的机器人关节的机器人关节齿轮的齿轮刚度的另一个方法的流程图;
[0023]
图7示出了处于在根据本发明的方法的实验分析中使用的姿势的机器人臂;
[0024]
图8示出了在测量关节马达电流的同时,通过在机器人臂的基座关节上施加不同的恒定速度信号而获得的摩擦扭矩/速度图;
[0025]
图9示出了通过使用测力计对机器人臂的工具凸缘施加一组已知扭矩并且测量变形作为机器人关节齿轮的每侧处的绝对关节编码器读数之间的差值而获得的柔性扭矩/传动装置变形图;
[0026]
图10示出了在实验分析中使用的机器人臂的基座关节的角位置、角速度和角加速度;
[0027]
图11示出了广义麦克斯韦滑动(generalized maxwell
‑
slip)摩擦模型的示意性表示;
[0028]
图12示出了通过根据本发明的方法获得的柔性扭矩/传动装置变形图;
[0029]
图13示出了在实验分析中获得的机器人关节齿轮的齿轮刚度。
具体实施方式
[0030]
鉴于仅旨在说明本发明原理的示例性实施方案描述了本发明。技术人员将能够在权利要求的范围内提供若干实施方案。在整个说明书中,提供类似效果的类似元件的参考
标号具有相同的后两位。此外,应当理解,在实施方案包括多个相同特征的情况下,仅一些特征可以由参考标号标记。
[0031]
本发明可以实施为机器人臂,并且根据图1所示的机器人臂进行描述。机器人臂101包括多个机器人关节103a、103b、103c、103d、103e、103f以及连接机器人基座105和机器人工具凸缘107的机器人连杆104b、104c、104d。基座关节103a与肩部关节直接连接,并且被构造成使机器人臂围绕基座轴线111a(以短划虚线示出)旋转,如旋转箭头113a所示。肩部关节103b经由机器人连杆104b连接到肘部关节103c,并且被构造成使机器人臂围绕肩部轴线111b(示出为指示轴线的十字)旋转,如旋转箭头113b所示。肘部关节103c经由机器人连杆104c连接到第一腕部关节103d,并且被构造成使机器人臂围绕肘部轴线111c(示出为指示轴线的十字)旋转,如旋转箭头113c所示。第一腕部关节103d经由机器人连杆104d连接到第二腕部关节103e,并且被构造成使机器人臂围绕第一腕部轴线111d(示出为指示轴线的十字)旋转,如旋转箭头113d所示。第二腕部关节103e连接到机器人工具关节103f,并且被构造成使机器人臂围绕第二腕部轴线111e(以点划线示出)旋转,如旋转箭头113e所示。机器人工具关节103f包括机器人工具凸缘107,该机器人工具凸缘能够围绕工具轴线111f(以点划线示出)旋转,如旋转箭头113f所示。因此,所示的机器人臂是具有六个自由度的六轴机器人臂,然而,应当注意,本发明可以设置在包括更少或更多机器人关节的机器人臂中,并且机器人关节可以直接或经由机器人连杆连接到相邻机器人关节。应当理解,机器人关节可以是相同的和/或不同的,并且在机器人关节中的一些机器人关节中可以省略机器人关节齿轮。图中还示出了重力方向123。
[0032]
机器人臂包括至少一个机器人控制器115,该至少一个机器人控制器被配置为通过基于机器人的动力学模型控制提供给关节马达的马达扭矩来控制机器人关节。机器人控制器115可作为包括界面设备117的计算机而提供,该界面设备使得用户能够对机器人臂进行控制和编程。控制器可作为如图1所示的外部设备而提供,或作为集成到机器人臂中的设备而提供。界面设备可例如作为工业机器人领域中已知的示教器而提供,该示教器可经由有线或无线通信协议与控制器进行通信。界面设备可例如包括显示器119和多个输入设备121,诸如按钮、滑块、触摸板、操纵杆、轨迹球、手势识别设备、键盘等。显示器可作为既充当显示器又充当输入设备的触摸屏而提供。
[0033]
图2示出了机器人关节203的示意性剖视图。示意性机器人关节203可以反映图1的机器人101的机器人关节103a
‑
103f中的任何一个。机器人关节包括具有马达轴225的关节马达209。马达轴225被构造成经由机器人关节齿轮229使输出轴227旋转。输出轴227围绕旋转轴线211(以点划线示出)旋转,并且可以连接到机器人的相邻零件(未示出)。因此,机器人的相邻零件可以相对于机器人关节203围绕旋转轴线211旋转,如旋转箭头213所示。在例示的实施方案中,机器人关节包括连接到输出轴的输出凸缘231,并且输出凸缘可以连接到相邻的机器人关节或机器人臂的臂部分。然而,输出轴可以直接连接到机器人的相邻零件,或者通过任何其他方式,使得机器人的相邻零件能够通过输出轴旋转。
[0034]
关节马达被构造成如马达控制领域中已知的通过向马达轴施加马达扭矩来使马达轴旋转,例如基于指示由所述马达轴施加的扭矩τ
控制,马达
的马达控制信号233。
[0035]
机器人关节齿轮229形成传动装置系统,该传动装置系统被构造成将由马达轴提供的扭矩传递到输出轴,例如以在马达轴和输出轴之间提供齿轮齿数比。机器人关节齿轮
可例如被提供为正齿轮、行星齿轮、锥齿轮、蜗轮、应变波齿轮或其他类型的传动装置系统。机器人关节包括至少一个关节传感器,该至少一个关节传感器提供至少指示输出轴的角位置q和马达轴的角位置θ的传感器信号。例如,输出轴的角位置可以由输出编码器235指示,该输出编码器提供指示输出轴相对于机器人关节的角位置的输出编码器信号236。类似地,马达轴的角位置可以通过输入编码器237提供,该输入编码器提供指示马达轴相对于机器人关节的角位置的输入编码器信号238。输出编码器235和输入编码器237可以是能够分别指示输出轴和马达轴的角位置、速度和/或加速度的任何编码器。输出/输入编码器例如可以被配置为基于布置在相应轴上的编码器轮239的位置来获得相应轴的位置。编码器轮例如可以是旋转编码器领域中已知的光学编码器轮或磁性编码器轮。指示输出轴的角位置的输出编码器和指示马达轴的角位置的输入编码器使得可以确定机器人关节齿轮的输入侧(马达轴)和输出侧(输出轴)之间的关系。
[0036]
机器人关节可以可选地包括一个或多个马达扭矩传感器241,该一个或多个马达扭矩传感器提供指示由马达轴提供的扭矩的马达扭矩信号242。例如,马达扭矩传感器可以被提供为电流传感器,该电流传感器获得通过关节马达的线圈的电流,由此马达扭矩可以如马达控制领域中已知的那样被确定。例如,结合多相马达,可以提供多个电流传感器,以便获得通过多相马达的相中的每个相的电流,然后可以基于通过帕克变换(park transformation)从相电流获得的正交电流来获得马达扭矩。另选地,可以使用其他类型的传感器例如力
‑
扭矩传感器、应变仪等来获得马达扭矩。
[0037]
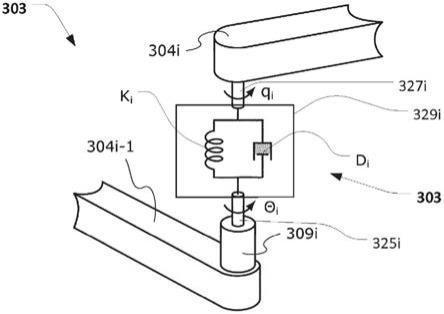
图3示出了连接机器人连杆304i
‑
1和机器人连杆304i的机器人关节303的模型,其中关节马达309i被布置在机器人连杆304i
‑
1上,并且相对于机器人连杆304i
‑
1使机器人连杆304i旋转。关节马达的马达轴325i经由机器人关节齿轮329i(以示意形式示出)连接到输出轴327i,并且机器人连杆304i与输出轴327i一起旋转。机器人关节齿轮提供了马达轴与输出轴之间的齿轮齿数比,并且在理想齿轮中,马达轴的旋转根据机器人关节齿轮的齿轮齿数比立即转换为输出轴的旋转。然而,如在本发明的背景技术中所述,在机器人臂领域中使用的机器人关节齿轮的类型中存在柔性。机器人关节齿轮的柔性可以由机器人关节齿轮的齿轮刚度来指示,该齿轮刚度定义了通过机器人关节齿轮的扭矩与机器人关节齿轮的输入侧(马达轴)和输出侧(输出轴)之间的变形之间的关系。机器人关节齿轮的柔性可以表示为并联联接在机器人关节齿轮的输入侧(马达轴)和输出侧(输出轴)之间的弹簧326和阻尼器328。弹簧的弹簧常数k
i
指示机器人关节齿轮的齿轮刚度,并且阻尼器的阻尼常数d
i
指示机器人关节齿轮的阻尼。如在本发明的背景技术中所述,机器人关节齿轮的齿轮刚度和阻尼可以变化;因此,k
i
和d
i
不必是常数。
[0038]
当扭矩施加到机器人关节齿轮时,机器人关节的非无穷大齿轮刚度导致机器人关节齿轮的输入侧和输出侧之间的偏转。机器人关节齿轮的偏转可以由指示马达轴的角位置θ与输出轴的角位置q之间的差值的偏转变量来指示,因此该偏转变量被定义为:
[0039]
等式1 φ
关节,i
=θ
i
‑
q
i
[0040]
关节传动扭矩τ
关节,i
定义了经由机器人关节齿轮从马达轴传递到输出轴的扭矩,并且可以被建模为偏转变量φ
关节
及其时间导数的函数:
[0041]
等式2
[0042]
其中τ
e,i
(φ
关节,i
)是取决于齿轮刚度k
i
和机器人关节齿轮的偏转的柔性扭矩,并且
是取决于阻尼系数d
i
和机器人关节齿轮的偏转的一阶时间导数以及机器人关节齿轮的偏转的时间导数的阻尼扭矩。
[0043]
机器人关节齿轮的阻尼扭矩例如可以通过以下步骤获得:
[0044]
·
固定机器人关节齿轮的输出轴;
[0045]
·
向机器人关节齿轮的马达轴施加扭矩以产生齿轮偏转;
[0046]
·
保持机器人关节齿轮的马达轴静止,并且从机器人关节齿轮的马达轴上移除施加的扭矩;
[0047]
·
当机器人关节齿轮的马达轴经历振幅随时间减小的阻尼谐波运动时,观察机器人关节齿轮的马达轴随时间的位置;
[0048]
·
阻尼扭矩是运动期间能量耗散的量度。假设欠阻尼谐波运动,阻尼系数d
i
可以获得为:
[0049]
等式3
[0050]
其中b是马达轴的质量惯性矩,a1和a2分别是第一振动和第二振动的振幅,并且t1和t2分别是第一运动和第二运动的时间。
[0051]
如果运动没有欠阻尼,则较大的质量惯性矩被添加到输入轴。
[0052]
机器人关节齿轮的齿轮刚度k
i
的特征在于,引起齿轮偏转的柔性扭矩τ
e
作为齿轮偏转的函数而改变多少。因此,齿轮刚度可以表示为:
[0053]
等式4
[0054]
假设未变形传动装置不存在柔性扭矩并且传动装置在压缩和延伸方面具有相同的行为,因此:
[0055]
等式5
[0056]
等式6
[0057]
图4示出了包括多个(n个)机器人关节403i、403i+1
…
403n的机器人臂的简化结构图。机器人臂例如可以类似于图1中所示的机器人臂地实施为具有多个相互连接的机器人关节,其中机器人关节可以类似于图2中所示的机器人关节地实施。应当理解,为了简单起见,省略了机器人关节中的一些机器人关节和机器人关节之间的机器人连杆。控制器连接到包括显示器119和多个输入设备121的界面设备,如结合图1所描述的。控制器415包括处理器443、存储器445以及使得能够与至少一个外围设备通信的至少一个输入和/或输出端口。
[0058]
控制器被配置为通过向关节马达提供马达控制信号来控制机器人关节的关节马达。马达控制信号433i、433i+1
…
433n指示每个关节马达将通过马达轴提供的马达扭矩τ
控制,马达,i
、τ
控制,马达,i+1
和τ
控制,马达,n
。马达控制信号可以指示期望的马达扭矩、由输出轴提供的期望扭矩、由马达线圈提供的电流或者可以从其获得马达扭矩的任何其他信号。马达扭矩信号可以被发送到马达控制驱动器(未示出),该马达控制驱动器被配置为利用产生期望的马达扭矩的马达电流来驱动马达关节。机器人控制器被配置为基于如现有技术中已知的机器
人臂的动态模型来确定马达扭矩。动态模型使得控制器可以计算关节马达应当向关节马达中的每个关节马达提供哪个扭矩以使机器人臂执行期望的移动和/或以静态姿态布置。机器人臂的动态模型可以存储在存储器445中。
[0059]
如结合图2所述,机器人关节包括:输出编码器,该输出编码器提供指示输出轴相对于相应机器人关节的角位置q
,i
、q
,i+1
…
q,
n
的输出编码器信号436i、436i+1
…
436n;输入编码器,该输入编码器提供指示马达轴相对于相应机器人关节的角位置θ
,i
、θ,
i+1
…
θ,
n
的输入编码器信号438i、438i+1
…
438n;以及马达扭矩传感器,该马达扭矩传感器提供指示由相应机器人关节的马达轴提供的扭矩τ
实际,马达,i
,τ
实际,马达,i+1
…
τ
实际,马达,n
的马达扭矩信号442i、442i+1
…
442n。控制器被配置为接收输出编码器信号436i、436i+1
…
436n、输入编码器信号438i、438i+1
…
438n和马达扭矩信号442i、442i+1
…
442n。
[0060]
控制器被进一步配置为通过以下操作获得机器人臂的机器人关节齿轮中的至少一个机器人关节齿轮的齿轮刚度:
[0061]
·
使用关节马达将马达扭矩施加到至少一个机器人关节的马达轴;
[0062]
·
获得机器人关节的马达轴的角位置;
[0063]
·
获得机器人关节的输出轴的角位置;
[0064]
以及基于施加到马达轴的马达扭矩、马达轴的角位置、输出轴的角位置和机器人臂的动态模型来确定齿轮刚度。
[0065]
控制器可以例如被配置为执行获得机器人关节齿轮的齿轮刚度的方法,该机器人关节齿轮的齿轮刚度是通过图5至图6中所示的方法获得的并且在以下段落[0034]至[0066]中描述。
[0066]
图5示出了获得机器人臂的机器人关节的机器人关节齿轮的齿轮刚度的方法的流程图,其中机器人关节能够连接到至少另一个机器人关节,并且其中机器人关节包括具有马达轴的关节马达,该马达轴被构造成经由机器人关节齿轮使输出轴旋转。该方法例如可以用于获得图1至图4中所示的机器人臂的关节齿轮的齿轮刚度,并且该方法是针对图1至图4中所示的机器人臂来描述的。需注意,下面描述的方法是考虑到获得机器人臂的所有机器人关节齿轮的齿轮刚度的方法,然而应当理解,该方法可以用于获得单个机器人关节齿轮或机器人关节齿轮中的一些机器人关节齿轮的齿轮刚度。
[0067]
该方法包括初始化550的步骤,将马达扭矩施加到关节马达的马达轴的步骤552;获得关节马达的马达轴的角位置的步骤554;获得机器人关节齿轮的输出轴的角位置的步骤556,以及基于施加到马达轴的马达扭矩、所获得的马达轴的角位置、所获得的输出轴的角位置以及机器人臂的动态模型确定机器人关节齿轮的齿轮刚度的步骤560。
[0068]
初始化550的步骤包括获得机器人臂的动态模型d
机器人
的步骤,并且可以基于机器人臂和机器人关节的先验知识kor[机器人知识],诸如机器人关节和机器人连杆的尺寸和重量;关节马达特性;与附接到机器人臂的最终有效载荷、机器人臂相对于重力的取向以及机器人臂和机器人关节的摩擦特性有关的信息。
[0069]
机器人臂的动态模型可被定义并预先存储在控制器的存储器中,并且在一些实施方案中,可允许用户(例如)通过提供附接到机器人臂的有效载荷的有效载荷信息或限定机器人臂相对于重力的取向来修改机器人臂的动态模型。
[0070]
可以通过将机器人臂视为具有多个(n+1)刚性机器人连杆和多个(n)回转机器人
关节的开放运动链来获得机器人臂的动态模型,该开放运动链包括被构造成使至少一个机器人连杆旋转的关节马达。在该示例中,通过进行以下假设来提供动态模型:
[0071]
a1:关节马达的转子是质量中心在旋转轴线(马达轴)处的均质体;
[0072]
a2:关节马达位于从动机器人连杆之前的机器人连杆上;和
[0073]
a3:关节马达的转子的角速度是由于它们自身的旋转。
[0074]
假设a1是关节马达(诸如电动机)的长寿命的基本要求,并且还意味着机器人关节的动态将与马达轴的角位置无关。在图3中示出了假设a2中描述的关节马达和机器人连杆的运动学布置。应当理解,当与其中驱动机器人连杆的关节马达可以布置在机器人臂的其他位置处的实际机器人相比时,假设a2可能在物理上不成立,然而,总是存在与该假设在理论上等效的条件。假设a3对于具有大减速比[18]的机器人关节齿轮是合理的,该减速比典型地在50
‑
200的量级,或者更具体地在100
‑
150的量级。这些假设相当于忽略由于关节马达和机器人连杆之间的惯性耦合而引起的能量贡献,并且还意味着科里奥利和向心项变得与转子的角速度无关。
[0075]
机器人臂的构型的特征在于广义坐标其中q是包括机器人关节齿轮的输出轴的角位置的向量,并且θ是包括如在机器人关节齿轮的输出侧的“空间”中看到的马达轴的角位置的向量。因此:
[0076][0077]
其中θ
真实
是马达轴的实际角位置(例如,由编码器测量),并且r是机器人关节齿轮的齿轮齿数比。这是本申请通篇所用的符号。
[0078]
类似的τ
马达
是包括如在机器人关节齿轮的输出侧的“空间”中看到的马达轴4的扭矩的矢量。因此:
[0079]
τ
马达
=r
·
τ
真实马达
[0080]
其中,τ
真实马达
是马达轴的真实扭矩(例如,由传感器测量),并且r是机器人关节齿轮的齿轮齿数比。这是本申请通篇所用的符号。
[0081]
在假设1
‑
3之后,首先从机器人臂的机器人关节齿轮的输出侧看到的动态模型变为[18]:
[0082]
等式7
[0083]
其中τ
关节
是包括机器人关节齿轮中的每个机器人关节齿轮的传动扭矩τ
关节,i
…
τ
关节,n
的向量;q是包括机器人关节齿轮的输出轴的角位置的向量;是包括机器人关节齿轮的输出轴的角位置的一阶时间导数的向量,并且因此与输出轴的角速度相关;是包括机器人关节齿轮的输出轴的角位置的二阶时间导数的向量,并且因此与输出轴的角加速度相关。m(q)是机器人臂的惯性矩阵,并且指示机器人臂的作为机器人关节齿轮的输出轴的角位置的函数的质量惯性矩。是机器人臂的作为机器人关节齿轮的输出轴的角位置和角速度的函数的科里奥利和向心扭矩。g(q)是作用在机器人臂上的作为机器人关节齿轮的输出轴的角位置的函数的重力矩。
[0084]
是包括作用于在机器人关节齿轮的输出轴上的摩擦扭矩的向量。作用在输
出轴的摩擦扭矩取决于输出轴的角速度然而,应当理解,作用在输出轴上的摩擦扭矩也可以取决于其他参数,诸如温度、润滑剂的类型、机器人臂的负载、机器人臂的位置/取向等。例如,可以将可以例如被提供为具有插值的线性或非线性函数或查找表(lut),并且可以基于例如机器人的先验知识、实验来定义,以及/或者在机器人操作期间被自适应地更新。例如,可以在机器人关节的校准期间获得,例如通过测量机器人关节齿轮的总摩擦扭矩,并且假设摩擦扭矩仅作用在马达轴上,因此τ
ext
是指示作用在机器人关节齿轮的输出轴上的外部扭矩的向量。外部扭矩例如可以由作用在机器人臂的零件上的外力和/或扭矩提供。例如,如果机器人的工具凸缘经受由f
ext
描述的外力和/或扭矩,则在机器人关节的输出轴处产生的扭矩变为:
[0085]
等式8 τ
ext
=j
t
(q)f
ext
[0086]
其中j
t
(q)是机器人臂的转置操纵器雅可比矩阵,并且其中f
ext
是描述相对于机器人臂的工具凸缘的外力和扭矩的方向和量值的向量。
[0087]
其次,从机器人关节齿轮的输入侧看到的动力学模型变为[18]:
[0088]
等式9
[0089]
其中τ
关节
是包括机器人关节齿轮中的每个机器人关节齿轮的传动扭矩τ
关节,i
…
t
关节,n
的向量;是包括关节马达的马达轴的角位置的二阶时间导数的向量,并且因此与马达轴的角加速度相关。b是指示关节马达转子的质量惯性矩的正定对角矩阵。是包括作用在马达轴上的摩擦扭矩的向量,并且τ
马达
是指示由关节马达产生的扭矩的向量。
[0090]
是包括作用在机器人关节齿轮的输入轴上的摩擦扭矩的向量。作用在输入轴上的摩擦扭矩取决于输入轴的角速度然而,应当理解,作用在输入轴上的摩擦扭矩还可取决于其他参数,诸如温度、润滑剂类型、机器人臂的负载、机器人臂的位置/取向等。
[0091]
可以例如被提供为具有插值的线性或非线性函数或查找表(lut),并且可以基于例如机器人的先验知识、实验来定义,以及/或者在机器人操作期间被自适应地更新。例如,通过在不使机器人臂接触外部物体的情况下使机器人关节齿轮以恒定的角速度运行输出轴的至少一个整转或任何正整数倍的转数,同时获得机器人关节马达的马达扭矩,可以获得每个机器人关节的在这些条件下,由于恒定的角速度,机器人臂的惯性项为零,科里奥利和向心项抵消,因为此时只有一个机器人关节移动,并且由于输出轴完全旋转,重力项g(q)抵消,并且没有外部扭矩提供给机器人臂。因此,等式7简化为:
[0092]
等式10
[0093]
其中τ
关节,平均
指示输出轴的一次旋转期间的平均关节传动扭矩,并且指示输出轴的一次旋转期间作用在机器人关节齿轮的输出轴上的摩擦力。此外,在这些条件下,由于恒定的速度,关节马达的惯性项为零。因此,等式9简化为:
[0094]
等式11
[0095]
合并等式10和等式11使得可以获得作用在马达轴上的摩擦扭矩,如:
[0096]
等式12
[0097]
摩擦扭矩也可机械建模为例如基于三个摩擦特性的广义麦克斯韦滑动(gms)模型[19]。
[0098]
1)恒定速度的斯特里贝克(stribeck)曲线,
[0099]
2)在预滑动阶段具有非局部记忆的迟滞函数,以及
[0100]
3)滑动阶段中的摩擦滞后。
[0101]
gms模型捕获通常在机器人关节齿轮例如应变波齿轮中看到的迟滞的行为,其中gms模型可基于所测量的来获得。
[0102]
对于单个机器人关节齿轮,gms模型可以被可视化为经受相同输入速度ω=dθ/dt的m个无质量滑块
‑
弹簧模型(如图11所示)的并联连接。总摩擦力由每个元件i的摩擦力之和给出,即
[0103]
等式13
[0104]
每个基本模型的动力学由公式(10)和(11)表示。如果元件粘连:
[0105]
等式14
[0106]
其中k
i
是第i元件的弹簧刚度。元件保持粘连,直到f
i
>v
i
s(ω),其中分数参数υ
i
决定粘连期间每个元件的最大力fi。如果元件正在滑动
[0107]
等式15
[0108]
吸引力参数c决定滑动时总摩擦力接近s(ω)的速度。
[0109]
非线性静态图
[0110]
等式16
[0111]
捕获stribeck效应和非线性粘性摩擦,其中fc、f
s
、v
s
和μ分别是库仑摩擦、静摩擦、stribeck速度和stribeck形状因子,并且是粘性摩擦系数。
[0112]
通常,机器人控制器被配置为通过基于等式7和等式9以及机器人关节齿轮的输出轴的期望角位置q、角速度和/或期望角加速度来确定机器人关节齿轮的马达轴产生的扭矩τ
马达
,以控制机器人臂的移动/位置。机器人关节齿轮的输出轴的期望角位置q、角速度和/或期望加速度可以例如经由存储在存储器中的机器人程序或通过输入设备接收的用户输入来提供。输出轴的角位置q、角速度和/或期望加速度可以直接提供,或者作为其他参数提供,从这些参数可以例如以机器人工具凸缘相对于机器人基座等的坐标的形式获得参数。然后,控制器被配置为通过调节通过关节马达的电流来控制关节马达。
[0113]
向关节马达的马达轴施加马达扭矩的步骤552可例如由控制器执行,该控制器指示关节马达向机器人关节齿轮的马达轴施加马达扭矩。例如,控制器可被配置为提供将机
器人臂保持在静态姿态的马达扭矩,其中马达扭矩足以克服机器人臂上的重力,或者通过提供移动机器人的零件的马达扭矩。因此,驱动关节马达以便通过马达轴产生马达扭矩τ
马达
。
[0114]
在一个实施方案中,使用关节马达向马达轴施加马达扭矩的步骤导致机器人臂的至少一部分的移动。这可以通过用导致机器人关节旋转的电流驱动关节马达来实现,由此机器人臂的至少一部分运动。例如,机器人控制器可被配置为将马达扭矩施加到关节马达,这导致机器人臂的一部分相对于重力向上移动,并且在这种情况下,所施加的马达扭矩大于补偿重力所需的马达扭矩。而且,机器人控制器可被配置为将马达扭矩施加到关节马达,这导致机器人臂的一部分相对于重力向下移动,并且在这种情况下,所施加的马达扭矩小于补偿重力所需的马达扭矩。然而,应当理解,可以施加导致机器人臂的至少一部分在任何方向上移动的任何马达扭矩。因此,机器人关节齿轮的输入轴和机器人关节齿轮的输出轴两者旋转。可以在机器人臂的移动期间获得根据等式7和等式9的动态模型的动态项,该动态项取决于输出轴的角速度输出轴的角加速度马达轴的角速度和/或马达轴的角加速度例如,输出轴的角速度输出轴的角加速度马达轴的角速度马达轴的角加速度可以如段落[0053]
‑
[0054]中所述获得。这使得在机器人臂的移动和操作期间获得机器人关节齿轮的齿轮刚度成为可能。
[0115]
该方法可以包括获得由马达轴提供的实际马达扭矩τ
实际
的可选步骤535。实际马达扭矩可以例如通过获得通过关节马达的电流来获得,由此可以如马达控制领域中已知的那样获得实际马达扭矩。例如,如果关节马达被提供为具有比操纵器的动态快得多的动态的三相永磁同步电机(pmsm)。如果关节马达在它们的电流饱和极限下操作,则马达轴扭矩可以通过以下等式获得:
[0116]
等式17 τ
实际马达,马达
=k
τ
i
马达
[0117]
其中τ
实际,马达
是包括由(在机器人关节齿轮的输出空间中看到的)关节马达的马达轴提供的实际扭矩的向量,k
τ
是扭矩常数的正定对角矩阵,并且i
马达
是包括使用帕克变换从关节马达的相电流获得的扭矩产生(正交)电流的向量。
[0118]
马达轴的实际扭矩也可以通过使用力/扭矩传感器(诸如指示马达轴的实际扭矩的应变仪)获得。获得由马达轴产生的实际扭矩τ
实际
提供了更准确的齿轮刚度,因为可以消除期望的马达信号和实际扭矩之间的最终偏差。
[0119]
获得关节马达的马达轴的角位置的步骤554可以通过测量马达轴的角位置(例如通过使用编码器诸如机器人技术中已知的光学编码器/磁性编码器)来获得。马达轴的角位置θ可以存储在存储器中以便稍后使用,例如以便存储在不同时间获得的马达轴的多个角位置。例如,通过角位置相对于时间的微分和二重微分,马达轴的角位置可以例如用于获得马达轴的角速度和/或角加速度。然后,马达轴的角速度和马达轴的角加速度可以用于使用机器人臂的动态模型的动态项来获得机器人关节齿轮刚度。因此,能够在机器人臂的移动和操作期间获得机器人关节齿轮的齿轮刚度。应当理解,另选地,可以使用测量实际参数的传感器/编码器来获得马达轴的角速度和/或其他马达轴的角加速度。
[0120]
获得机器人关节齿轮的输出轴的角位置的步骤556可以通过测量输出轴的角位置(例如通过使用编码器诸如机器人技术中已知的光学编码器/磁性编码器)来获得。输出轴
的角位置q可以存储在存储器中以便稍后使用,例如,在不同时间获得的输出轴的多个角位置可以存储在存储器中。另选地,可以获得机器人关节齿轮的输出轴的角位置作为控制器在其上产生马达扭矩的输出轴的期望角位置。这使得在不包括用于测量输出轴的角位置的编码器的机器人关节中估计输出轴的角度成为可能。例如,通过角位置相对于时间的微分和二重微分,机器人关节齿轮的输出轴的角位置可以例如用于获得机器人关节齿轮的输出轴的角速度和/或角加速度。然后,输出轴的角速度和输出轴的角加速度可以用于使用机器人臂的动态模型的动态项来获得机器人关节齿轮刚度。因此,能够在机器人臂的移动和操作期间获得机器人关节齿轮的齿轮刚度。应当理解,另选地,可以使用测量实际参数的传感器/编码器来获得输出轴的角速度和/或马达轴的角加速度。
[0121]
确定机器人关节齿轮的齿轮刚度的步骤560可以通过考虑图3中所示并在段落[0024]
‑
[0028]中描述的机器人关节的柔性模型来实施。通过用等式2的右手侧代替等式7和等式9的τ
关节
,然后隔离非线性柔性τ
e
(φ
关节
),可以进一步指定机器人臂的动态模型:
[0122]
等式18
[0123]
等式19
[0124]
其中φ
关节
是包括每个机器人关节齿轮的偏转的向量,是包括每个机器人关节的偏转的一阶时间导数的向量,并且是包括作为机器人关节的偏转的时间导数的函数的每个机器人关节齿轮的阻尼扭矩的向量,并且τ
e
(φ
关节
)是包括作为机器人关节齿轮的偏转的函数的每个机器人关节齿轮的柔性扭矩的向量。
[0125]
因此,确定机器人关节齿轮的齿轮刚度的步骤560包括基于马达轴的角位置θ和输出轴的角位置q获得机器人关节齿轮的偏转φ
关节
的步骤562,其中机器人关节齿轮的偏转φ
关节
可以指示为马达轴的角位置q和输出轴的角位置q之间的差,如等式所示。1.应当理解,偏转也可以另选地指示为输出轴的角位置和马达轴的角位置之间的差。确定机器人关节齿轮的齿轮刚度的步骤560包括至少基于马达轴的角位置、输出轴的角位置和所述机器人臂的动态模型获得在机器人关节齿轮的偏转处的机器人关节齿轮的柔性扭矩的步骤564。在机器人关节齿轮的偏转处的机器人关节齿轮的柔性扭矩τ
e
(φ
关节
)可以基于等式18获得,其中马达轴的角位置θ和输出轴的角位置q作为输入变量,因为等式18的其余部分已经在初始化期间获得,并且例如存储在存储器中。需注意,在没有外力/扭矩作用在机器人臂上的情况下,τ
ext
为零,然而,如果例如外力作用在机器人工具凸缘上,则可以基于等式8获得外力/扭矩。此外,还可使用力/扭矩传感器获得来自外力的贡献。附加地或另选地,τ
e
(φ
关节
)可以基于等式19获得,其中马达轴的角位置θ、输出轴的角位置q和由马达轴产生的马达扭矩τ
马达
作为输入变量。因此,应当理解,由马达轴产生的马达扭矩τ
马达
可以作为步骤564的附加/可选输入来提供。在包括步骤553的实施方案中,当使用等式19获得机器人关节齿轮的齿轮刚度时,马达扭矩τ
马达
可以由在步骤553中获得的实际马达扭矩τ
实际
代替。马达扭矩τ
马达
和实际马达扭矩τ
实际
在图5中在括号[]和()中指示,以便说明它们可以作为附加参数提供给步骤564。
[0126]
在步骤566中,可以基于在步骤562中获得的机器人关节齿轮的偏转和在步骤564中获得的机器人关节齿轮的柔性扭矩τ
e
(φ
关节
)来获得机器人关节齿轮的齿轮刚度。考虑等
式4、等式5和等式6,可以获得如下的齿轮刚度:
[0127]
等式20
[0128]
其中τ
e
(φ
关节
)可基于等式18或等式19获得,如结合步骤564所述。
[0129]
由等式20获得的齿轮刚度k
i
(φ
关节
)可用于获得机器人关节齿轮存在特定偏转和机器人关节齿轮的偏转为零的情况之间的平均齿轮刚度(通常是当没有马达扭矩提供给机器人关节齿轮时)。在这种情况下,等式20可简化为:
[0130]
等式21
[0131]
附加地或另选地,机器人关节齿轮的齿轮刚度可以指示为柔性扭矩τ
e
(φ
关节
),其中在机器人关节齿轮的给定偏转下的高柔性扭矩指示高齿轮刚度,因为需要更高的柔性扭矩来实现机器人关节齿轮的偏转;相反,在机器人关节齿轮的给定偏转下的低柔性扭矩指示低齿轮刚度,因为需要较小的柔性扭矩来实现机器人关节齿轮的偏转。机器人关节齿轮的齿轮刚度因此可以基于等式18和/或等式19来指示。
[0132]
该方法可以包括将获得的齿轮刚度k
i
(φ
关节
)与机器人关节齿轮刚度k
i,极限
(φ
关节
)的先验知识进行比较的可选步骤570,并且基于获得的齿轮刚度和机器人齿轮刚度的所述先验知识提供机器人关节齿轮的状态s
关节
。例如,可以在机器人使用寿命期间的不同时间获得平均齿轮刚度,并且将其与齿轮刚度的阈值进行比较,其中该阈值是基于关于齿轮刚度相对于机器人关节齿轮磨损的演变的知识而确定的。因此,机器人关节齿轮的状态可用于指示机器人关节齿轮的磨损。通常,机器人关节齿轮的齿轮刚度在机器人关节齿轮断裂之前趋于减小,因为齿轮啮合处的材料被磨损。因此,控制器可适于在齿轮刚度达到阈值时提供警告,由此可在齿轮断裂之前将机器人关节齿轮送至修理或更换。这使得可以避免机器人关节齿轮的故障,从而避免机器人臂的停机时间。
[0133]
该方法可以包括可选步骤580,其通过提供指示马达轴的期望马达扭矩τ
马达
的控制信号τ
实际
,基于所获得的机器人关节齿轮的齿轮刚度来控制机器人臂。例如,通过修改机器人的动态模型以包括机器人关节齿轮的刚度,然后基于在步骤560中获得的齿轮刚度来更新机器人的动态模型,可以基于机器人关节齿轮的齿轮刚度来获得期望的马达扭矩τ
马达
。
[0134]
图6示出了获得机器人臂的机器人关节的机器人关节齿轮的齿轮刚度的方法的流程图。该方法类似于图5所示的方法,并且类似的步骤已获得与图5中相同的附图标号,并且将不进一步描述。
[0135]
在该实施方案中,该方法包括重复以下步骤的步骤665(以箭头示出):
[0136]
·
使用关节马达向马达轴施加马达扭矩的步骤552;
[0137]
·
获得马达轴的角位置的步骤554;
[0138]
·
获得输出轴的角位置的步骤556;
[0139]
·
基于马达轴的角位置和输出轴的角位置获得机器人关节齿轮的偏转的步骤562;和
[0140]
·
至少基于马达轴的角位置、输出轴的角位置和机器人臂的动态模型,获得在机器人关节齿轮的偏转处的机器人关节齿轮的柔性扭矩的步骤564。
[0141]
这些步骤被重复多次,并且在步骤562中获得的机器人齿轮的偏转φ
关节
和在步骤
564中获得的机器人关节齿轮的柔性扭矩被存储用于每次重复。因此,可以获得包括多个数据点(φ
关节
;τ
e
(φ
关节
))的数据集,并且可以针对机器人关节齿轮的不同偏转获得机器人关节齿轮的柔性扭矩。在重复期间,可在步骤552中改变施加到机器人关节齿轮的马达轴的马达扭矩,由此可以在机器人关节齿轮偏转的范围内获得机器人关节齿轮的柔性扭矩。这使得可以作为机器人关节齿轮偏转的函数映射机器人关节齿轮的柔性扭矩,并且可以作为机器人关节齿轮偏转的函数获得机器人关节齿轮的齿轮刚度。
[0142]
步骤667是用数学函数拟合获得的数据点的步骤,该数据点包括机器人关节齿轮的柔性扭矩和对应的机器人关节齿轮偏转。例如,可将所获得的单个机器人关节的数据点拟合成具有线性参数化多项式基的多项式函数:
[0143]
等式22 τ
e,i
(φ
关节,i
)=ψ
t
(φ
关节,i
)α
i
[0144]
其中ψ
t
(φ
关节
)是偏转变量φ
关节
的线性多项式基,α
i
是包括第i机器人关节的多项式基函数的常数的向量。基于等式5和等式6中的对称假设,回归量ψ
t
(φ
关节
)可以被指定为仅包含φ
关节
的奇次幂,因此:
[0145]
等式23 ψ
t
(φ
关节
)=φ
关节2p
‑1,p=1,2,......,p
[0146]
在求和形式中,多项式函数可以写成:
[0147]
等式24
[0148]
其中α
p,i
是包括第i机器人关节的多项式基函数的常数的向量。在包括多个机器人关节的机器人臂中,可为每个机器人关节提供多项式函数和对应的常数向量。
[0149]
如段落[0027]中所述,如等式4所述,机器人关节齿轮的刚度可以确定为机器人关节齿轮的柔性扭矩相对于机器人关节齿轮偏转的变化。该方法可以包括通过获得柔性扭矩相对于所述机器人关节齿轮的偏转的斜率来获得机器人关节机器人的齿轮刚度的步骤668。例如,对于在零偏转处不存在柔性扭矩的情况,可以在由等式20和等式21指示的数据点中的至少两个数据点之间确定斜率。该斜率也可通过拟合到数据点的数学函数的微分来指示。在多项式函数的情况下,这对应于等式24的微分
[0150]
等式25
[0151]
通过使用根据本发明的方法和另选方法两者获得作为机器人关节齿轮偏转的函数的单个机器人关节齿轮的柔性扭矩,在机器人臂上演示了获得机器人关节的机器人关节齿轮的齿轮刚度的方法。实验已经使用由universal robots提供的ur5e机器人臂来执行,并且在以下段落中讨论结果。
[0152]
图7示出了采用实验分析中使用的构型的机器人臂701。机器人臂是六轴机器人,其包括承载机器人臂的机器人基座705。基座关节703a直接连接到肩部关节703b,并且被构造成使机器人臂围绕基座轴线711a(以短划虚线示出)旋转,如旋转箭头713a所示。肩部关节703b经由机器人连杆704b连接到肘部关节703c,并且被构造成使机器人臂围绕肩部轴线711b旋转,如旋转箭头713b所示。肘部关节703c经由机器人连杆704c连接到第一腕部关节703d,并且被构造成使机器人臂围绕肘部轴线711c旋转,如旋转箭头713c所示。第一腕部关节703d连接到第二腕部关节703e,并且被构造成使机器人臂围绕第一腕部轴线711d旋转,
如旋转箭头713d所示。第二腕部关节703e连接到机器人工具关节703f,并且被构造成使机器人臂围绕第二腕部轴线711e旋转,如旋转箭头713e所示。机器人工具关节703f包括机器人工具凸缘707,该机器人工具凸缘能够围绕工具轴线711f旋转,如旋转箭头713f所示。
[0153]
在实验期间,机器人臂701被布置成其中基座轴线711a与重力方向723平行并且肩部轴线711b、肘部轴线711c、第一腕部轴线711d、第二腕部轴线711e及工具轴线711b垂直于重力方向723的姿势。基座关节703a是在实验期间旋转的唯一关节,并且肩部关节703b、肘部关节703c、第一腕部关节703d、第二腕部关节703e和工具关节703b因此在实验期间被固定。
[0154]
在实验中获得基座关节703a的机器人关节齿轮的齿轮刚度。首先,使用另选方法获得ur5e机器人臂的基座关节703a的摩擦特性和刚度特性。
[0155]
通过在测量机器人关节电流时在基座关节上施加不同的恒定速度信号来识别稳态摩擦扭矩。对于恒定速度,等式7、等式9和等式17产生f
θ
+f
q
+k
τ
i。稳态摩擦扭矩如图8所示。图8示出了在马达轴的不同角速度下测量的摩擦扭矩的曲线图,其中水平轴线指示马达轴的角速度881,并且垂直轴线指示摩擦扭矩882。包括角速度和对应的摩擦扭矩883的实验数据点以三角形示出。使用具有立方线搜索过程的拟牛顿(quasi
‑
newton)方法,并且通过broyden
‑
fletcher
‑
goldfarb
‑
shanno(bfgs)方法更新赫斯(hessian)矩阵近似,将等式16中的参数拟合到数据点,并且该拟合由实线884示出。使用归一化均方根误差(nrmse)方法,对数据点的拟合度为98.6%。
[0156]
通过锁定机器人关节齿轮的输入轴(马达轴)并使用sauter fh
‑
s500数字测力计在输出轴上施加一组已知扭矩,同时使用机器人的输出和输入编码器测量机器人关节齿轮的变形,在静态设置中获得基座关节的机器人关节齿轮的柔性扭矩。图9示出了其中垂直轴线指示机器人关节齿轮987的柔性扭矩并且水平轴线指示机器人关节齿轮986的偏转的曲线图。实验数据点包括机器人关节偏转和对应的柔性扭矩,并且以三角形988示出。数据点已经拟合到线性参数化的多项式基989(静态poly拟合),如在等式24中所述,其中p=2,并且被图示为实线。使用归一化均方根误差(nrmse)方法,多项式基与数据点的拟合度为96.9%。
[0157]
通过根据以随机生成的等待时间和角位置、速度和加速度以范围在最大允许值的30%至100%的间隔生成的bang
‑
coast
‑
bang关节空间轨迹旋转基座关节,基于根据本发明的方法动态地获得基座关节的机器人关节齿轮的柔性扭矩。图10示出了用于驱动机器人的基座关节的关节空间轨迹的曲线图,其中水平轴线1093指示以秒为单位的时间;曲线图1093示出了基座关节输出轴的角位置;曲线图1094示出了基座关节输出轴的角速度;曲线图1095示出了基座关节输出轴的角加速度。
[0158]
在实验期间,在机器人臂根据图10中所示的关节空间轨迹移动时,测量基座关节的输出轴的角位置、基座关节的马达轴的角位置以及通过基座关节马达的电流。柔性扭矩是使用等式19和等式17基于测量的基座关节的输出轴的角位置、基座关节的马达轴的角位置和通过基座关节马达的电流获得的。
[0159]
图12示出了其中垂直轴线指示机器人关节齿轮987的柔性扭矩并且水平轴线指示机器人关节齿轮986的偏转的曲线图。实验数据点包括机器人关节偏转和对应的柔性扭矩,并且以三角形1288示出。实验数据点已经使用递归最小二乘(rls)法[20]拟合为线性参数
化多项式基(虚线所示的动态poly拟合1290),p=2,如下一段所述。使用归一化均方根误差(nrmse)方法,多项式基与数据点的拟合度为96,7%。
[0160]
用递归最小二乘(rls)法估计时变参数是通过引入忽略过去数据的遗忘因子来实现的。在本示例中,传入信息(传输变形)不均匀地分布在参数空间上。如果在某个方向上存在激励,那么只能在该相同方向上进行跟踪,因此估计算法只能在激励子空间内跟踪时变参数。特别地,受[21]中的结果的启发,通过激励子空间的适当概念,等式22中的参数向量通过以下过程来估计:
[0161]
等式26
[0162]
等式27 r(k)=ψ
t
(k)p(k
‑
1)ψ(k)
[0163]
等式28
[0164]
等式29
[0165]
等式30
[0166]
等式31
[0167]
其中δ>0强制协方差矩阵p的增量,从而改善算法警觉性。以对干扰的增加的敏感性为代价,通过降低μ实现了更高的警觉性。通过设置μ=1和δ=0,等式31简化为标准rls算法。
[0168]
如段落[0063]中描述的静态获得的柔性扭矩的多项式基的拟合(静态poly拟合989)也已经包括在图12中。在通过这两种方法获得的柔性扭矩之间存在非常好的对准。因此,在机器人关节齿轮的输出轴旋转的动态条件下,可以基于根据本发明的方法获得机器人关节齿轮的柔性扭矩和/或刚度。例如,通过获得输入轴的角位置、输出轴的角位置和施加到输入轴的马达扭矩。其中施加到输入轴的马达扭矩例如可以基于通过关节马达(提供为pmsm)的线圈的相电流获得。
[0169]
图13示出了通过对图12中的静态poly拟合989和动态poly拟合曲线图1290进行微分而获得的关节刚度。垂直轴线指示机器人关节齿轮1397的齿轮刚度并且水平轴线指示机器人关节齿轮986的偏转。经由静态测量结果获得的齿轮刚度示出为实线1398(静态poly刚度),并且通过线性参数化的多项式基989相对于机器人关节偏转的微分获得。经由动态测量结果获得的齿轮刚度示出为虚线1397(动态poly刚度),并且通过线性参数化的多项式基1290相对于机器人关节偏转的微分获得。通过这两种方法获得的作为机器人关节偏转的函数的齿轮刚度的变化非常好地对准。
[0170]
因此,本发明使得可以在机器人臂的普通使用期间在线获得机器人臂的机器人关节齿轮的柔性扭矩和齿轮刚度,其中机器人臂通常执行例如与生产设置有关的多个移动。
[0171]
附图标号简述
[0172]
[0173]
appropriate for control purposes,”in ieee international conference for physics and control,st.petersburg,russia,proceedings,pp.1170
‑
1177,2003.
[0195]
[20]s.bittanti et al.,“recursive least
‑
squares identification algorithms with incomplete excitation:convergence analysis and application to adaptive control,”ieee trans.automatic control,vol.35,pp.1371
‑
1373,1990.
[0196]
[21]s.bittanti et al.,“convergence and exponential convergence of identification algorithms with directional forgetting factor,”automatica,vol.26,no.5,pp.929
‑
932,1990.
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1