幼教机器人及幼教机器人系统的制作方法
1.本发明属于虚拟现实(virtual reality,vr)教学技术领域,尤其涉及一种幼教机器人及幼教机器人系统。
背景技术:
2.虚拟现实技术,又称灵境技术,是20世纪发展起来的一项全新的实用技术。虚拟现实技术囊括计算机、电子信息、仿真技术于一体,其基本实现方式是计算机模拟虚拟环境从而给人以环境沉浸感。随着社会生产力和科学技术的不断发展,各行各业对vr技术的需求日益旺盛。vr技术也取得了巨大进步,并逐步成为一个新的科学技术领域。
3.随着云计算及通信技术的发展成熟,尤其是5g技术的商用,通过云端的高性能计算机计算渲染,并结合高传输效率的5g通信技术回传显示,使vr技术以及延申的增强现实(augmented reality,ar)等技术的应用更进了一步。vr技术的研究已逐步走出原有的简单场景应用和理论研究层面,并开始向远程医疗及教育等应用场景中落地部署。但是在落地部署方面,在原有的vr理论框架下,仍然存在特别多的具体问题需要解决。比如,在vr应用于教育方面,就存在传统头戴式的vr眼镜容易使佩戴者产生佩戴疲劳、交互方式单一且不人性化等不足。尤其是在幼儿教育场景中,使用者还存在理解力弱、不配合、好奇心重等问题,所以原有的产品架构设计几乎无法在幼儿教学场景中商业化推行使用。
4.因此,如何在幼儿教学场景中,避免幼儿的佩戴疲劳是本领域技术人员亟需解决的技术问题。
技术实现要素:
5.本发明实施例提供一种幼教机器人及幼教机器人系统,能够在幼儿教学场景中,避免幼儿的佩戴疲劳。
6.第一方面,本发明实施例提供一种幼教机器人,包括:
7.机器人主体;
8.通信组件,用于向云服务器发送虚拟现实vr云渲染请求,并接收云服务器发送的vr云渲染结果;
9.vr显示模块,vr显示模块包括:设置于机器人主体头部的观察窗和设置于观察窗内部的显示单元;
10.显示单元,用于基于vr云渲染结果,显示vr云渲染结果对应的vr教学资源场景。
11.可选地,幼教机器人还包括:
12.行走执行部件;其中,行走执行部件包括:驱动轮、转向轮、驱动组件及刹车组件;
13.行走控制单元,用于控制行走执行部件移动机器人主体。
14.可选地,通信组件包括:5g通信组件、4g通信组件、有线互联网通信组件、无线互联网通信组件中的至少一种。
15.可选地,机器人主体的背部还设置有立体空腔结构的操作室,操作室的内部包括:
16.定位器,用于向通信组件发送定位器的物理按键的状态信息。
17.可选地,定位器的物理按键包括:启用与关闭功能控制按键,和/或,取放对象的控制按键。
18.可选地,操作室的内部还包括:
19.全景摄像头,用于获取操作室内的全景视频信息;
20.和/或,
21.定位摄像阵列,用于获取定位器的视频数据;
22.和/或,
23.定位器充电仓,用于定位器的充电和储放。
24.可选地,操作室的内部包括定位摄像阵列,操作室的内部还包括:
25.交互运算单元,交互运算单元与定位摄像阵列连接,用于基于视频数据,确定定位器的方位信息以及定位器相对于操作室的空间坐标信息。
26.可选地,操作室的内部包括全景摄像头,vr显示模块还包括:
27.设置于机器人主体的头部正面的表情交互显示单元和视觉单元;
28.其中,表情交互显示单元与全景摄像头连接,用于显示全景视频信息。
29.可选地,操作室上设有权限操作口,用于取出和/或放入定位器。
30.第二方面,本发明实施例提供一种幼教机器人系统,包括:
31.第一方面或者第一方面任一可选的实现方式中的幼教机器人和云服务器;
32.其中,幼教机器人用于向云服务器发送虚拟现实vr云渲染请求,并接收云服务器发送的vr云渲染结果;
33.云服务器,用于接收vr云渲染请求,基于vr云渲染请求执行渲染运算得到vr云渲染结果,向幼教机器人发送vr云渲染结果。
34.本发明实施例的幼教机器人及幼教机器人系统,能够在幼儿教学场景中,避免幼儿的佩戴疲劳。该幼教机器人包括机器人主体;通信组件,用于向云服务器发送vr云渲染请求,并接收云服务器发送的vr云渲染结果;vr显示模块,vr显示模块包括:设置于机器人主体头部的观察窗和设置于观察窗内部的显示单元;显示单元,用于基于vr云渲染结果,显示vr云渲染结果对应的vr教学资源场景。基于该幼教机器人,在幼儿教学场景中,幼儿可通过观察窗观看vr教学资源场景,解决了现有技术中传统头戴式的vr眼镜容易使幼儿产生佩戴疲劳的问题。
附图说明
35.为了更清楚地说明本发明实施例的技术方案,下面将对本发明实施例中所需要使用的附图作简单的介绍,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
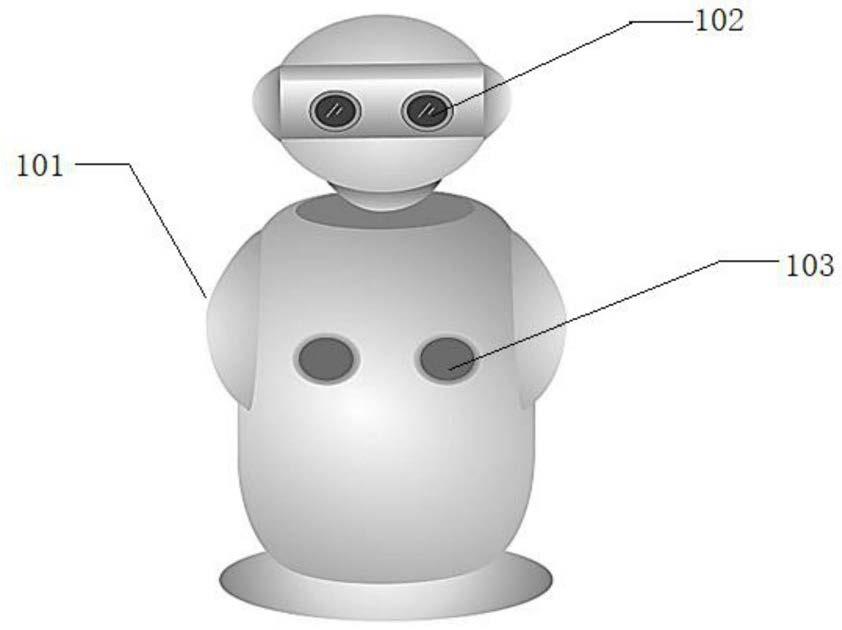
36.图1是本发明实施例提供的一种幼教机器人的结构示意图;
37.其中,101-机器人主体;102-观察窗;103-权限操作口。
具体实施方式
38.下面将详细描述本发明的各个方面的特征和示例性实施例,为了使本发明的目
的、技术方案及优点更加清楚明白,以下结合附图及具体实施例,对本发明进行进一步详细描述。应理解,此处所描述的具体实施例仅被配置为解释本发明,并不被配置为限定本发明。对于本领域技术人员来说,本发明可以在不需要这些具体细节中的一些细节的情况下实施。下面对实施例的描述仅仅是为了通过示出本发明的示例来提供对本发明更好的理解。
39.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
40.目前,在幼儿教育场景中,传统头戴式的vr眼镜容易使幼儿产生佩戴疲劳,为了解决现有技术问题,本发明实施例提供了一种幼教机器人及幼教机器人系统。下面首先对本发明实施例所提供的幼教机器人进行介绍。
41.图1示出了本发明实施例提供的一种幼教机器人的结构示意图。如图1所示,该幼教机器人,可以包括:
42.机器人主体101;
43.通信组件,用于向云服务器发送vr云渲染请求,并接收云服务器发送的vr云渲染结果;
44.vr显示模块,vr显示模块包括:设置于机器人主体101头部的观察窗102和设置于观察窗102内部的显示单元;
45.显示单元,用于基于vr云渲染结果,显示vr云渲染结果对应的vr教学资源场景。
46.基于该幼教机器人,在幼儿教学场景中,幼儿可通过观察窗102观看vr教学资源场景,解决了现有技术中传统头戴式的vr眼镜容易使幼儿产生佩戴疲劳的问题。
47.在一个实施例中,幼教机器人还可以包括:
48.行走执行部件;其中,行走执行部件包括:驱动轮、转向轮、驱动组件及刹车组件;
49.行走控制单元,用于控制行走执行部件移动机器人主体101。
50.在一个实施例中,通信组件包括:5g通信组件、4g通信组件、有线互联网通信组件、无线互联网通信组件中的至少一种。
51.在一个实施例中,机器人主体101的背部还设置有立体空腔结构的操作室,操作室的内部包括:
52.定位器,用于向通信组件发送定位器的物理按键的状态信息。
53.在一个实施例中,定位器的物理按键包括:启用与关闭功能控制按键,和/或,取放对象的控制按键。
54.在一个实施例中,操作室的内部还可以包括:
55.全景摄像头,用于获取操作室内的全景视频信息;
56.和/或,
57.定位摄像阵列,用于获取定位器的视频数据;
58.和/或,
59.定位器充电仓,用于定位器的充电和储放。
60.在一个实施例中,操作室的内部包括定位摄像阵列,操作室的内部还可以包括:
61.交互运算单元,交互运算单元与定位摄像阵列连接,用于基于视频数据,确定定位器的方位信息以及定位器相对于操作室的空间坐标信息。交互运算单元还可获取定位器传输至操作室的物理按键的状态信息,根据定位器的物理按键的状态信息的不同执行不同的操作。
62.在一个实施例中,操作室的内部包括全景摄像头,vr显示模块还可以包括:
63.设置于机器人主体101的头部正面的表情交互显示单元和视觉单元;
64.其中,表情交互显示单元与全景摄像头连接,用于显示全景视频信息。通过机器人头部的表情交互显示单元可以清晰显示操作室内的实时操作影像信息。定位摄像阵列和表情交互显示单元主要用于机器人vr功能的使用教学,教会使用者在操作室内“盲操作”的方法及操作要领。
65.具体地,操作室内壁为规则已知的定位摄像阵列视觉可识别的图案,比如一定形状或者一定颜色规律(如尺寸沿某一方向线性变化或周期性线性变化的坐标格纹)的坐标格纹图案等,用于通过定位摄像阵列快速定位。在操作室内部设置有多个定位器充电仓,用于提供定位器的充电和储放,定位器的充电可采用接触触点充电或者无线充电方式,定位器的储放可采用磁吸固定、卡接固定等方式。
66.定位器为具有身份识别功能的物块结构(身份识别功能可以通过不同的图案实现,也可以通过身份标识号(identity document,id)芯片实现)。定位器包含多个物理按键,还包括蓝牙、无线上网(wifi)等无线通信组件,用于与操作室内部对应的通信单元通信连接,可传输定位器的物理按键状态信息。定位器的表面设置有定位摄像阵列视觉可识别的视觉定位图案,即从不同视角观察定位器时,所观察到的图案样式完全不同。
67.定位器所包括的启用与关闭功能控制按键,用于确定是否启用定位器功能。由于通过vr系统虚拟渲染出的空间接近于无限,而用于交互的操作室是有限的,通过启用与否的按键实现了有限操作空间对无限虚拟空间的交互操作与控制。
68.定位器所包括的取放对象的控制按键(也即抓取/释放对象的控制按键),当操作该按键时,可以将定位器与vr系统中渲染出的可操作的实体进行匹配和取消匹配。例如,vr渲染场景中出现了一只蚂蚁,操作者想要将蚂蚁抓过来观察蚂蚁的肚子。
69.实现该交互过程的方法是:取出一个定位器并启动定位器,此时vr场景中将出现与定位器对应的操作对象(比如一只手、一块磁铁或者一个半透明的球体等),移动定位器或旋转定位器,在定位摄像阵列的实时捕捉下,可在vr场景中看到操作对象的对应运动。当操作对象运动到蚂蚁附近或者与蚂蚁的空间位置重合时,可以操作该抓取/释放对象的控制按键抓住蚂蚁,然后通过移动定位器实现对蚂蚁的移动。如果定位器已移动到操作室的边缘仍然不能触摸到蚂蚁,则可操作启动和关闭功能按键关闭定位器功能,然后把定位器移动到操作室与当前边缘相对的边缘或其他空间内,再启动定位器以继续移动操作对象,实现对无限空间的操作。当抓到蚂蚁后,操作者可以通过翻转、旋转定位器,实现对蚂蚁各个角度的观察。操作室内可设置至少2个定位器及定位器充电仓。
70.在一个实施例中,操作室上可设有权限操作口103,用于取出和/或放入定位器。
71.具体地,操作室设置有带锁的定位器放入或取出口(即权限操作口103),当需要取出、更换或放入定位器时,可通过钥匙(可以是电子钥匙、机械钥匙或者其结合)解锁该权限操作口103以实现定位器的放入或取出。一般情况下,定位器将不可能被随意取出。操作室可设置两个权限操作口103,可以放入操作者的两只手臂,权限操作口103可设置有遮光帘,可以降低操作室内的视觉环境被自然光照的干扰。
72.本发明实施例还提供一种幼教机器人系统,包括:图1所示的幼教机器人和云服务器;
73.其中,幼教机器人用于向云服务器发送虚拟现实vr云渲染请求,并接收云服务器发送的vr云渲染结果;
74.云服务器,用于接收vr云渲染请求,基于vr云渲染请求执行渲染运算得到vr云渲染结果,向幼教机器人发送vr云渲染结果。
75.在一个实施例中,将cloud xr云平台与幼教机器人结合,将vr眼镜集成到幼教机器人机身,利用幼教机器人优势,即处理芯片的稳定性,结合cloud xr平台的先进性,提供适合幼儿的vr内容供幼儿体验vr资源进行学习,实现寓教于乐。
76.基于上面内容可知,本发明实施例提供的幼教机器人及系统,具备如下有益效果:
77.(1)、本发明实施例提供了一种基于幼教机器人的vr云渲染系统设计方案,结合幼教机器人的运算处理能力、使用场景、通信方案以及大体积等优势,使教育场景的vr系统更贴近使用场景,增强用户的使用冲动,通信、渲染、数据处理等功能设计不再受限于佩戴式vr系统重量及佩戴中心的设计条件限制,能充分将功能及效果进行优化配置。
78.(2)、本发明实施例提供一种操作室式的交互控制方案,通过定位摄像阵列及全景摄像头解决了使用教学问题,同时通过对定位器的设计及系统交互运算单元的设计,实现有限操作空间对无限vr空间对象的完全操作,并通过空间内完全自由的定位器实体实现了逼真的空间交互体验,对于幼儿级使用者毫无操作门槛。
79.(3)、在结构方面,考虑到产品的使用场景及维护,创新地为操作室设计使用腔状操作口和维护、更换定位器的权限操作口103,控制了使用场景下被人为损坏、破坏(操作球丢失)问题的发生可能性,是产品化的有效解决方案。
80.以上所述,仅为本发明的具体实施方式。应理解,本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1