一种多机协同的小型消毒机器人的制作方法
[0001]
本发明属于机器人领域,具体涉及一种小型消毒机器人。
背景技术:
[0002]
根据市场要求,需要开发出一套能够在机场、车站、大型医院与方舱医院、学校、体育场、宾馆、快递分拣中心、垃圾与污水处理厂等大空间高人流环境下实现自主定位与构图,并且能够进行实时在线路径规划的可作业多机器人系统,以便在尽可能短的时间内完成大范围的消毒、检测等防疫工作。
[0003]
现有的消毒机器人多为大型单独作业机器人,具有长时间、大范围作业的能力,但是,单机器人的作业效率不高,完成一个区域的消毒工作需要很长的时间,同时由于作业范围广泛,机器人本身也可能成为一个病毒的传播者。当采用多机协同的小型轻量化消毒机器人时,多个机器人能够相互协调分配,同时完成一个大区域的作业,大大降低了作业时间,提高了工作效率;另外,由于轻量化设计,也使得机器人便于携带与投放。
[0004]
专利号为cn111084893a的发明专利,公开了一种喷雾消毒机器人,该机器人体积小,结构简单,由水泵为喷雾机构提供动力进行消毒液的喷洒,能够利用机器人来对恶劣环境进行喷雾消毒,减少了人工的参与,且成本更低。但是,该喷雾消毒机器人高度过低,喷雾动力有限,无法覆盖更广泛的空间,并且只能进行单台机器人操作,无法进行多机协同工作,消毒效率低。
技术实现要素:
[0005]
为了克服现有技术的不足,本发明提供了一种多机协同的小型消毒机器人,包括全向移动通用型底盘、喷洒消毒装置、传感器单元和控制系统模块;全向移动通用型底盘在机器人最下方,作为整个机器人的承载部分,采用多个全向轮排布,能够实现灵活移动以进行作业和避障;喷洒消毒装置和传感器单元固定在全向移动通用型底盘的顶板上不同位置;喷洒消毒装置完成消毒液的喷洒;传感器单元采用数据融合技术提高机器人的定位精度与障碍物识别能力;控制系统模块搭载于全向移动通用型底盘内部,用于数据的采集、处理与发送,以及多机器人之间、机器人与用户之间的通信,完成多机器人路径规划。本发明消毒机器人具有喷洒消毒、自主全向移动、自主避障的功能以及模块化、轻量化、低成本、高效率的优点。
[0006]
本发明解决其技术问题所采用的技术方案如下:
[0007]
一种多机协同的小型消毒机器人,包括全向移动通用型底盘、喷洒消毒装置、传感器单元和控制系统模块;
[0008]
所述全向移动通用型底盘承载喷洒消毒装置、传感器单元和控制系统模块,位于消毒机器人最下方;全向移动通用型底盘包括底板、顶板和至少三个全向轮驱动模块;所述底板和顶板通过所述第一连接柱固定连接,所述第一连接柱起到支撑作用;所述全向轮驱动模块沿底板周长等间距安装在底板上,通过调整每个全向轮驱动模块控制的全向轮的转
速和转向,使消毒机器人在地面上沿任意方向移动;
[0009]
所述喷洒消毒装置包括消毒水箱模块、喷洒单元和消毒模块;所述喷洒单元位于全向移动通用型底盘中心正上方,与全向移动通用型底盘的顶板固定连接;所述消毒水箱模块位于喷洒单元的一边,固定在全向移动通用型底盘的顶板上;所述消毒模块安装在消毒水箱模块下方;喷洒消毒装置完成消毒液的喷洒;
[0010]
所述传感器单元位于喷洒单元的另一边,固定在全向移动通用型底盘的顶板上;传感器单元包括激光雷达、毫米波雷达和视觉双目相机;从下向上依次为激光雷达、毫米波雷达和视觉双目相机;
[0011]
所述激光雷达通过第二连接柱安装在全向移动通用型底盘的顶板上,用于建立环境地图;激光雷达周围安装有激光雷达防护罩与激光雷达透明防护板,用于保护激光雷达;所述激光雷达透明防护板安装在所述激光雷达防护罩上,所述激光雷达防护罩与全向移动通用型底盘的顶板固定连接;
[0012]
所述毫米波雷达安装在激光雷达防护罩上方,用于检测前方障碍物;毫米波雷达周围安装有毫米波雷达防护罩与毫米波雷达透明防护板,用于保护毫米波雷达;所述毫米波雷达透明防护板安装在所述毫米波雷达防护罩上;
[0013]
所述毫米波雷达防护罩上方有相机固定板,所述相机固定板的面积大于毫米波雷达防护罩的面积;所述视觉双目相机位于相机固定板上方,固定安装在相机固定板上,相机固定板通过第三连接柱与激光雷达防护罩连接,所述第三连接柱用于支撑视觉双目相机;所述视觉双目相机用于视觉导航;
[0014]
所述控制系统模块位于全向移动通用型底盘内部,处于全向移动通用型底盘的底板与顶板之间;控制系统模块实现对消毒机器人的移动控制和作业控制,以及与其他消毒机器人进行通讯组成多机协同系统。
[0015]
进一步地,所述全向移动通用型底盘还包括底盘外壳、多个外壳固定件和底盘顶部外壳;所述多个外壳固定件固定安装在全向移动通用型底盘的底板上,沿底板的周长等间距均匀分布;所述底盘外壳通过外壳固定件安装在全向移动通用型底盘侧面,用于保护全向移动通用型底盘;所述底盘顶部外壳安装在全向移动通用型底盘的顶板上方,用于全向移动通用型底盘的顶部防护。
[0016]
进一步地,所述全向轮驱动模块包括全向轮、传动轴、立式轴承座、传动齿轮组、电机固定件、驱动电机组、轴承、限位螺母和紧固螺母;
[0017]
所述全向轮位于全向轮驱动模块的最外侧,与传动轴使用键连接,进行动力传动;所述全向轮外侧使用紧固螺母进行紧固,内侧使用传动轴的轴肩进行限位;
[0018]
所述传动轴通过立式轴承座与传动齿轮组连接;
[0019]
所述立式轴承座固定在全向移动通用型底盘的底板上,起到对传动轴支撑和限位的作用;
[0020]
所述驱动电机组包括第一驱动电机和第二驱动电机;所述电机固定件固定在全向移动通用型底盘的底板上,通过轴承与传动齿轮组连接;所述电机固定件包括两个电机固定位,分别固定第一驱动电机和第二驱动电机;所述传动齿轮组包括第一传动齿轮与第二传动齿轮,所述第一传动齿轮与第二传动齿轮为相同模数不同齿的齿轮,分别搭配第一驱动电机和第二驱动电机实现两种不同减速比;所述第一传动齿轮与第一驱动电机搭配构成
低驱动力模组,所述第二传动齿轮与第二驱动电机搭配构成高驱动力模组;低驱动力模组和高驱动力模组不同时工作。
[0021]
进一步地,所述第一驱动电机和第二驱动电机使用直流无刷电机,通过电子调速器进行调速,使用电机内置传感器获取里程反馈;
[0022]
进一步地,所述全向轮驱动模块能够仅安装低驱动力模组或高驱动力模组。
[0023]
进一步地,所述全向移动通用型底盘包括三个全向轮驱动模块,三个全向轮驱动模块安装在全向移动通用型底盘的底板上,呈正三角形排列;
[0024]
进一步地,所述控制系统模块包括电池、电池卡扣、驱动控制板、驱动底板、急停开关、降压模块、机器人控制模块和控制系统固定板;
[0025]
所述驱动底板位于全向轮驱动模块的上方,固定在全向轮驱动模块的电机固定件上,所述电池卡扣与驱动底板固定连接;所述电池放置在全向移动通用型底盘的底板上,使用电池卡扣进行固定;所述驱动控制板位于驱动底板上方,固定安装在驱动底板上,所述驱动控制板接收机器人控制模块发出的控制指令,控制全向轮驱动模块,同时采集消毒机器人位置和速度信息;所述控制系统固定板通过第五连接柱固定在全向移动通用型底盘的底板上,所述机器人控制模块位于控制系统固定板上方,固定安装在控制系统固定板上;
[0026]
所述急停开关安装在全向移动通用型底盘外部,用于控制消毒机器人电源,能够在突发情况下及时切断电源。
[0027]
所述降压模块与急停开关连接,用于提供不同于电池输出电压的直流电;
[0028]
进一步地,所述驱动控制板采用基于arm内核的stm32单片机,并且搭载姿态传感器和编码器测量单元实时测量消毒机器人的姿态和速度信息。
[0029]
进一步地,所述消毒模块包括消毒水泵和消毒装置底板;所述消毒水泵安装在消毒装置底板下方,与消毒装置底板固定连接,所述消毒水泵处于喷洒消毒装置最底端,下沉到全向移动通用型底盘内部;所述消毒装置底板与全向移动通用型底盘的顶板固定连接,起到固定喷洒消毒装置的作用;
[0030]
所述消毒水箱模块包括消毒水箱、水箱防护罩、水箱密封盖、双头快插接头和水箱顶板;所述水箱顶板在消毒装置底板上方与消毒装置底板通过第四连接柱固定连接,所述消毒水箱位于水箱顶板与消毒装置底板之间,与水箱顶板固定连接;所述消毒水箱包括一个注水口和一个出水口,出水口使用双头快插接头与消毒水泵的入水口连接,注水口位于消毒水箱上方,使用水箱密封盖密封;所述水箱防护罩与水箱顶板固定连接,安装在消毒水箱周围对消毒水箱模块进行防护;
[0031]
所述喷洒单元包括支撑管、底部固定件、喷洒舵机、舵机固定件、喷头固定件、上雾化喷头、下雾化喷头、pu管和节流阀;所述支撑管底部使用底部固定件与水箱顶板固定连接,支撑管顶部与舵机固定件连接;所述舵机固定件用于固定喷洒舵机;所述喷洒舵机控制上雾化喷头和下雾化喷头水平摆动;所述喷头固定件与喷洒舵机的舵盘连接,用于固定上雾化喷头和下雾化喷头;所述上雾化喷头朝斜上方进行消毒液喷洒,所述下雾化喷头朝斜下方进行消毒液喷洒;所述上雾化喷头与下雾化喷头使用pu 管与节流阀一端连接,所述节流阀另一端与消毒水泵的出水口连接,节流阀用于调节消毒液的输出流量。
[0032]
进一步地,所述喷头固定件具有一个旋转自由度。
[0033]
进一步地,所述第一连接柱、第二连接柱、第三连接柱和第四连接柱均为铝柱;所
述第五连接柱为铜柱。
[0034]
本发明具有以下有益效果:
[0035]
1、本发明的一种多机协同的小型消毒机器人采用轻量化与模块化设计,从而能够更好的实现多机协同作业,并且便于回收与投放;通过由多台消毒机器人组成多机协同系统,通过搭建无线网络进行消毒机器人通信,将采集的地图特征进行融合并分享位置信息,进行多机路径规划,能够分工完成一个大环境下的消毒工作,提高消毒作业的效率;
[0036]
2、本发明的一种多机协同的小型消毒机器人能够自主完成移动、避障与消毒作业,通过全向移动通用型底盘与喷洒消毒装置,使消毒机器人能够在障碍物较多的环境下完成自主避障与定点、定向消毒。
[0037]
3、本发明的一种多机协同的小型消毒机器人采用多种传感器,使用数据融合技术提高消毒机器人的定位精度与障碍物识别能力。
附图说明
[0038]
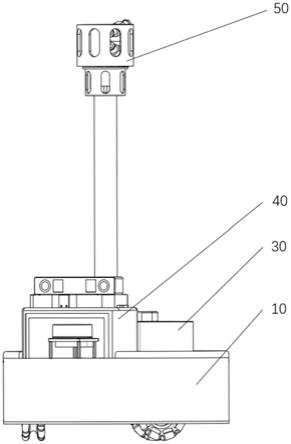
图1是本发明的总体结构示意图。
[0039]
图2是本发明的全向移动通用型底盘的结构示意图。
[0040]
图3是本发明的全向轮驱动模块的结构示意图。
[0041]
图4是本发明传感器单元结构示意图。
[0042]
图5是本发明喷洒消毒装置的剖视图。
[0043]
图中:01-底板,02-全向轮,03-传动轴,04-立式轴承座,05-全向轮驱动模块, 06-传动齿轮组,07-第一传动齿轮,08-电机固定件,09-第一驱动电机,10-全向移动通用型底盘,11-轴承,12-限位螺母,13-第二驱动电机,14-第二传动齿轮,15-紧固螺母,16-第一连接柱,17-顶板,18-急停开关,19-电池卡扣,20-电池,21-外壳固定件,22-驱动底板,23-驱动控制板,24-控制系统固定板,25-第五连接柱,26-机器人控制模块,27-底盘外壳,28-消毒水泵,29-消毒装置底板,30-消毒水箱模块,31
-ꢀ
消毒水箱,32-水箱防护罩,33-底部固定件,34-水箱密封盖,35-双头快插接头,36
-ꢀ
水箱顶板,37-第二连接柱,38-激光雷达,39-激光雷达防护罩,40-传感器单元,41
-ꢀ
激光雷达透明防护板,42-毫米波雷达,43-毫米波雷达透明防护板,44-毫米波雷达防护罩,45-底盘顶部外壳,46-相机固定板,47-视觉双目相机,48-支撑管,49-喷洒舵机,50-喷洒单元,51-舵机固定件,52-喷头固定件,53-上雾化喷头,54-下雾化喷头。
具体实施方式
[0044]
下面结合附图和实施例对本发明进一步说明。
[0045]
如图1所示,一种多机协同的小型消毒机器人,包括全向移动通用型底盘10、喷洒消毒装置、传感器单元40和控制系统模块;
[0046]
所述全向移动通用型底盘10承载喷洒消毒装置、传感器单元40和控制系统模块,位于消毒机器人最下方;全向移动通用型底盘10包括底板01、顶板17和至少三个全向轮驱动模块05;所述底板01和顶板17通过所述第一连接柱16固定连接,所述第一连接柱16起到支撑作用;所述全向轮驱动模块05沿底板周长等间距安装在底板01 上,通过调整每个全向轮驱动模块05控制的全向轮02的转速和转向,使消毒机器人在地面上沿任意方向移动;全
向移动通用型底盘10是能够搭载多功能上层作业装置的通用型移动底盘,配合传感器单元40,可以完成自主导航、自主避障、人机通信、多机通信等功能。
[0047]
所述喷洒消毒装置包括消毒水箱模块30、喷洒单元50和消毒模块;所述喷洒单元50位于全向移动通用型底盘10中心正上方,与全向移动通用型底盘10的顶板17 固定连接;所述消毒水箱模块30位于喷洒单元50的一边,固定在全向移动通用型底盘10的顶板17上;所述消毒模块安装在消毒水箱模块30下方;喷洒消毒装置完成消毒液的喷洒;
[0048]
如图4所示,所述传感器单元40位于喷洒单元50的另一边,固定在全向移动通用型底盘10的顶板17上;传感器单元40包括激光雷达38、毫米波雷达42和视觉双目相机47;从下向上依次为激光雷达38、毫米波雷达42和视觉双目相机47;
[0049]
所述激光雷达38通过第二连接柱37安装在全向移动通用型底盘10的顶板17上,用于建立环境地图;激光雷达38周围安装有激光雷达防护罩39与激光雷达透明防护板41,用于保护激光雷达38;所述激光雷达透明防护板41安装在所述激光雷达防护罩39上,所述激光雷达防护罩39与全向移动通用型底盘10的顶板17固定连接;
[0050]
所述毫米波雷达42安装在激光雷达防护罩39上方,用于检测前方障碍物;毫米波雷达42周围安装有毫米波雷达防护罩44与毫米波雷达透明防护板43,用于保护毫米波雷达42;所述毫米波雷达透明防护板43安装在所述毫米波雷达防护罩44上;
[0051]
所述毫米波雷达防护罩44上方有相机固定板46,所述相机固定板46的面积大于毫米波雷达防护罩44的面积;所述视觉双目相机47位于相机固定板46上方,固定安装在相机固定板46上,相机固定板46通过第三连接柱与激光雷达防护罩39连接,所述第三连接柱用于支撑视觉双目相机47;所述视觉双目相机47用于视觉导航;本实施例中,消毒机器人采用多传感器信息融合的算法,结合了电机里程反馈的位姿信息、速度信息,姿态传感器的角速度、加速度信息以及相机的视觉单元信息来进行融合定位,使得融合后消毒机器人的定位精度满足高精度要求;结合激光雷达与毫米波雷达的环境建立与及时信息采集能力,提高机器人的自动避障能力。
[0052]
所述控制系统模块位于全向移动通用型底盘10内部,处于全向移动通用型底盘 10的底板01与顶板17之间;控制系统模块实现对消毒机器人的移动控制和作业控制,以及与其他消毒机器人进行通讯组成多机协同系统。
[0053]
进一步地,如图2所示,所述全向移动通用型底盘10还包括底盘外壳27、多个外壳固定件21和底盘顶部外壳45;所述多个外壳固定件21固定安装在全向移动通用型底盘10的底板01上,沿底板01的周长等间距均匀分布;所述底盘外壳27通过外壳固定件21安装在全向移动通用型底盘10侧面,用于保护全向移动通用型底盘10;所述底盘顶部外壳45安装在全向移动通用型底盘10的顶板17上方,用于全向移动通用型底盘10的顶部防护。
[0054]
进一步地,如图3所示,所述全向轮驱动模块05包括全向轮02、传动轴03、立式轴承座04、传动齿轮组06、电机固定件08、驱动电机组、轴承11、限位螺母12和紧固螺母15;
[0055]
所述全向轮02位于全向轮驱动模块05的最外侧,与传动轴03使用键连接,进行动力传动;所述全向轮02外侧使用紧固螺母15进行紧固,内侧使用传动轴03的轴肩进行限位;
[0056]
所述传动轴03通过立式轴承座04与传动齿轮组06连接;
[0057]
所述立式轴承座04固定在全向移动通用型底盘10的底板01上,起到对传动轴 03支撑和限位的作用;
[0058]
所述驱动电机组包括第一驱动电机09和第二驱动电机13;所述电机固定件08固定在全向移动通用型底盘10的底板01上,通过轴承11与传动齿轮组06连接;所述电机固定件08包括两个电机固定位,分别固定第一驱动电机09和第二驱动电机13;所述传动齿轮组06包括第一传动齿轮07与第二传动齿轮17,所述第一传动齿轮07 与第二传动齿轮14为相同模数不同齿的齿轮,分别搭配第一驱动电机09和第二驱动电机13实现两种不同减速比;所述第一传动齿轮07与第一驱动电机09搭配构成低驱动力模组,所述第二传动齿轮14与第二驱动电机13搭配构成高驱动力模组;当全向移动通用型底盘10搭载的负载较轻时,使用低驱动力模组,当低驱动力模组无法满足负载需求时,使用高驱动力模组,两种驱动力模组装置不需要同时装载在底盘上。
[0059]
进一步地,所述第一驱动电机09和第二驱动电机13使用直流无刷电机,通过电子调速器进行调速,使用电机内置传感器获取里程反馈;
[0060]
进一步地,所述全向轮驱动模块05能够仅安装低驱动力模组或高驱动力模组。
[0061]
进一步地,所述全向移动通用型底盘10包括三个全向轮驱动模块05,三个全向轮驱动模块05安装在全向移动通用型底盘10的底板01上,呈正三角形排列;
[0062]
进一步地,所述控制系统模块包括电池20、电池卡扣19、驱动控制板23、驱动底板22、急停开关18、降压模块、机器人控制模块26和控制系统固定板24;
[0063]
所述驱动底板22位于全向轮驱动模块05的上方,固定在全向轮驱动模块05的电机固定件08上,所述电池卡扣19与驱动底板22固定连接;所述电池20放置在全向移动通用型底盘10的底板01上,使用电池卡扣19进行固定,充电时不需要将电池进行拆除;所述驱动控制板23位于驱动底板22上方,固定安装在驱动底板22上,所述驱动控制板23接收机器人控制模块26发出的控制指令,控制全向轮驱动模块05,同时采集消毒机器人位置和速度信息;所述控制系统固定板24通过第五连接柱25固定在全向移动通用型底盘10的底板01上,所述机器人控制模块26位于控制系统固定板24上方,固定安装在控制系统固定板24上;控制系统模块26搭载微型电脑与通信模块,是消毒机器人的控制中心和通信中心,用于消毒机器人数据的计算处理、消毒机器人通信与算法计算,控制消毒机器人自主移动、自主避障、自主作业,可以进行多消毒机器人之间、人机之间的通信,可以进行数据处理和多机器人路径规划。
[0064]
所述急停开关18安装在全向移动通用型底盘10外部明显处,用于控制消毒机器人电源,能够在突发情况下及时切断电源。
[0065]
所述降压模块与急停开关18连接,用于提供不同于电池输出电压的直流电;
[0066]
进一步地,所述驱动控制板23采用基于arm内核的stm32单片机,并且搭载姿态传感器和编码器测量单元实时测量消毒机器人的姿态和速度信息。
[0067]
进一步地,如图5所示,所述消毒模块包括消毒水泵28和消毒装置底板29;所述消毒水泵28安装在消毒装置底板29下方,与消毒装置底板29固定连接,所述消毒水泵28处于喷洒消毒装置最底端,下沉到全向移动通用型底盘10内部,降低了整个装置的重心;所述消毒装置底板29与全向移动通用型底盘10的顶板17固定连接,起到固定喷洒消毒装置的作用。
[0068]
所述消毒水箱模块30包括消毒水箱31、水箱防护罩32、水箱密封盖34、双头快插接头35和水箱顶板36;所述水箱顶板36在消毒装置底板29上方与消毒装置底板 29通过第四
连接柱固定连接,所述消毒水箱31位于水箱顶板36与消毒装置底板29 之间,与水箱顶板36固定连接;所述消毒水箱31包括一个注水口和一个出水口,出水口使用双头快插接头35与消毒水泵28的入水口连接,能够较为方便的安装消毒水管,注水口位于消毒水箱31上方,使用水箱密封盖34密封;所述水箱防护罩32与水箱顶板36固定连接,安装在消毒水箱31周围对消毒水箱模块进行防护;
[0069]
所述喷洒单元50包括支撑管48、底部固定件33、喷洒舵机49、舵机固定件51、喷头固定件52、上雾化喷头53、下雾化喷头54、pu管和节流阀;所述支撑管48底部使用底部固定件33与水箱顶板36固定连接,支撑管48顶部与舵机固定件51连接,支撑管具有较高的高度,可以覆盖广泛的空间;所述舵机固定件51用于固定喷洒舵机 49;所述喷洒舵机49控制上雾化喷头53和下雾化喷头54水平摆动,可以提高喷洒的角度,扩大消毒覆盖范围,并且可以实现定向消毒;所述喷头固定件52与喷洒舵机49 的舵盘连接,用于固定上雾化喷头53和下雾化喷头54;所述上雾化喷头53朝斜上方进行消毒液喷洒,所述下雾化喷头54朝斜下方进行消毒液喷洒,提高喷洒的纵向范围,提高消毒效率;所述上雾化喷头53与下雾化喷头54使用pu管与节流阀一端连接,所述节流阀另一端与消毒水泵28的出水口连接,节流阀用于调节消毒液的输出流量,根据需要调节消毒液的喷洒范围。
[0070]
进一步地,所述喷头固定件52具有一个旋转自由度。
[0071]
进一步地,所述第一连接柱16、第二连接柱37、第三连接柱和第四连接柱均为铝柱;所述第五连接柱25为铜柱。
[0072]
可以使用多个本发明的小型消毒机器人,组成多机协同系统。通过自组网技术使所有消毒机器人均连于同一局域网内,分配固定ip,实现终端控制系统与机器人控制系统的连接;通信架构使每个消毒机器人各运行一个节点管理器和参数管理器,分别只管理自身的节点和信息,多个消毒机器人之间通过tcp/ip网络协议进行通信。同时每个消毒机器人建立一个中继节点,用来接收其他消毒机器人发来的消息,然后将接收到的消息在自身的节点管理器管理的主题上进行发布。在多机协同路径规划方面,消毒机器人在完成多机器人的地图融合工作,形成防疫作业环境下的全局地图后,即可进行路径规划工作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1