桥梁、隧道智能检测车机械臂伸缩机构的制作方法
[0001]
本发明涉及涉及桥梁、隧道检测技术领域,具体的说是桥梁、隧道智能检测车机械臂伸缩机构。
背景技术:
[0002]
桥梁、隧道智能检测车是对桥梁、隧道定期探伤的一种设备;该设备主要通过高分辨率相机对桥梁、隧道混凝土表面的裂缝进行检测,根据裂缝的形状、长短、宽窄、深浅以及所处的部位,判断桥梁、隧道的早期病害。
[0003]
探测的机械臂往往具有伸缩功能,因此机械臂是由多层空心管构成,在工作时通常为水平状态,根据目前公知的技术,多层、长管自动伸缩机构,一般为多级齿轮齿条副结构、多级链轮链条副结构、液压缸或多阶钢丝绳牵引结构等,这些结构对于水平伸长十几米的水平机械臂来说,是无法实现的,不仅是结构复杂、故障率高的问题,含有齿轮齿条副、链轮链条副、或液压缸的重量就无法承受,所以,对于过长水平伸缩臂来说,自动伸缩仍然是一个技术难题。
技术实现要素:
[0004]
为了弥补以上不足,本发明提供了桥梁、隧道智能检测车机械臂伸缩机构,以解决上述背景技术中的问题。
[0005]
本发明的技术方案是:
[0006]
桥梁、隧道智能检测车机械臂伸缩机构,水平机械臂包括首节管、至少一个中节管、末节管、绳索、气管、伺服电机、管座与卷筒,所述管座的底座设有旋转节,所述管座上设有所述末节管,所述末节管通过所述中节管与所述首节管逐个叠套,所述末节管与所述中节管之间通过密封圈密封,所述中节管与所述首节管之间通过密封圈密封,所述末节管、中节管与首节管之间形成向连通密闭的空腔,气管的一端与所述末节管连通,所述气管的另一端与气源连通,绳索的一端与所述首节管顶端连接,所述绳索的另一端缠绕在卷筒上。
[0007]
作为优选的技术方案,所述卷筒位于所述管座的空腔内,所述卷筒被所述伺服电机驱动,所述伺服电机上罩有电机罩。
[0008]
作为优选的技术方案,所述卷筒位于所述管座的外表面上,所述卷筒被所述伺服电机驱动,所述伺服电机上罩有电机罩。
[0009]
作为优选的技术方案,所述绳索放置在所述末节管、中节管、首节管、管座的连通形成的空腔内,所述伺服电机与卷筒都密封在管座与电机罩形成的空腔内,所述伺服电机的基座与所述管座之间通过密封圈密封。
[0010]
作为优选的技术方案,所述绳索位于所述首节管、中节管与所述末节管的外侧。
[0011]
作为优选的技术方案,所述首节管、中节管与末节管为铝合金首节管、铝合金中节管、铝合金末节管。
[0012]
作为优选的技术方案,所述首节管、中节管与末节管为碳纤维材料首节管、碳纤维
材料中节管、碳纤维材料末节管。
[0013]
作为优选的技术方案,所述首节管、中节管与末节管相互之间设有导向键。
[0014]
作为优选的技术方案,所述伺服电机的动力线、信号分别通过密闭的过墙航空插头引出。
[0015]
作为优选的技术方案,还包括承载车辆、底座、多节机械臂及其驱动系统、摄像器材、控制系统、信息处理系统以及数据传输系统构成,多节机械臂中包括第一节机械臂、第二机械臂,所述第一节机械臂通过轴承支承与底座连接,所述第二节机械臂通过铰链与第一节机械臂连接,所述第二节机械臂4的尾端设有所述旋转节5,所述旋转节5后端设有水平机械臂6,水平机械臂6的尾端设有摄像器材7。
[0016]
作为优选的技术方案,所述摄像器材包括照相机,录像机其中的一种。
[0017]
由于采用了上述技术方案桥梁、隧道智能检测车机械臂伸缩机构,水平机械臂包括首节管、至少一个中节管、末节管、绳索、气管、伺服电机、管座与卷筒,所述管座的底座设有旋转节,所述管座上设有所述末节管,所述末节管通过所述中节管与所述首节管逐个叠套,所述末节管与所述中节管之间通过密封圈密封,所述中节管与所述首节管之间通过密封圈密封,所述末节管、中节管与首节管之间形成向连通密闭的空腔,气管的一端与所述末节管连通,所述气管的另一端与气源连通,绳索的一端与所述首节管顶端连接,所述绳索的另一端缠绕在卷筒上,所述卷筒位于所述管座的空腔内,所述卷筒被所述伺服电机驱动,所述伺服电机上罩有电机,该发明通过机-电-气复合协调控制,顺利实现水平机械臂自动伸缩功能,结构轻便,控制灵活;桥梁、隧道智能检测的水平机械臂伸缩机构,其机械臂的伸长为气体动力,机械臂的缩回靠卷筒卷拉绳索的拉力,水平机械臂的伸长、或缩回的距离由伺服电机通过卷筒释放卷拉绳索的长短决定。
附图说明
[0018]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0019]
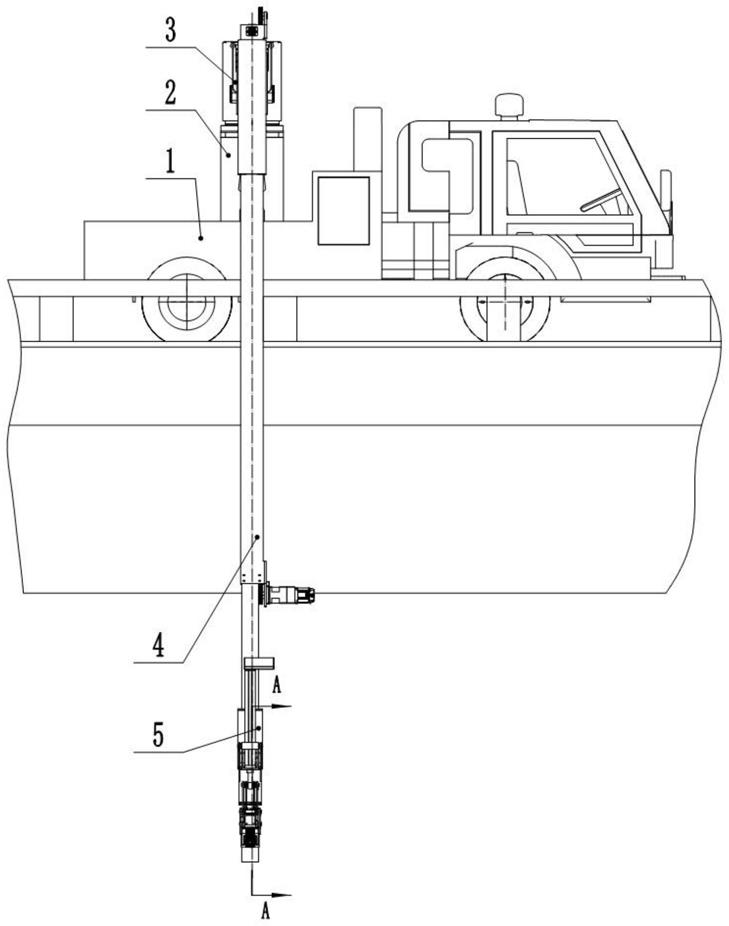
图1为本发明实施例桥梁、隧道智能检测车机械臂伸缩机构探测桥梁状态侧视图;
[0020]
图2为本发明实施例桥梁、隧道智能检测车机械臂伸缩机构探测桥梁状态主视图;
[0021]
图3为本发明实施例1的水平机械臂的结构示意图;
[0022]
图4为本发明实施例2的水平机械臂的结构示意图;
[0023]
其中:1.承载载具,2.底座,3.第一节机械臂,4.第二节机械臂,5.旋转节,6.水平机械臂,7.摄像器材,601.首节管,602.中节管,603.末节管,604. 绳索,605.气管,606.电机罩,607.伺服电机,608.管座,609.卷筒。
具体实施方式
[0024]
下面结合附图和具体实施例进一步说明本发明。
[0025]
实施例1,如图1、图2、图3所示,水平机械臂6包括首节管601、至少一个中节管602、末节管603、绳索604、气管605、伺服电机607、管座608与卷筒609,所述管座608的底座设有
旋转节5,所述管座608上设有所述末节管 603,所述末节管603通过所述中节管602与所述首节管601逐个叠套,所述末节管603与所述中节管602之间通过密封圈密封,所述中节管602与所述首节管601之间通过密封圈密封,所述末节管603、中节管602与首节管601之间形成向连通密闭的空腔,气管605的一端与所述末节管603连通,所述气管605 的另一端与气源连通,绳索604的一端与所述首节管601顶端连接,所述绳索 604的另一端缠绕在卷筒609上,所述卷筒609位于所述管座608的空腔内,所述卷筒608被所述伺服电机607驱动,所述伺服电机607上罩有电机罩606。
[0026]
所述绳索604放置在所述末节管603、中节管602、首节管601、管座608 的连通形成的空腔内,所述伺服电机607与卷筒609都密封在管座608与电机罩606形成的空腔内,所述伺服电机607的基座与所述管座608之间通过密封圈密封,绳索604放置在水平机械臂6的空腔内,同时,伺服电机607和卷筒 609都密闭在密闭的空腔内,以便形成向前推送机械臂管节的气体动力,外观简洁。
[0027]
所述首节管601、中节管302与末节管603为铝合金首节管601、铝合金中节管602、铝合金末节管603,以减轻重量。
[0028]
所述首节管601、中节管602与末节管603相互之间设有导向键,以限制周向旋转。
[0029]
还包括承载车辆1、底座2、多节机械臂及其驱动系统、照相机7、控制系统、信息处理系统以及数据传输系统构成,多节机械臂中包括第一节机械臂3、第二机械臂4,所述第一节机械臂3为水平放置,通过轴承支承与底座 2连接,所述第一节机械臂3能够在水平面内回转,所述第二节机械臂4通过铰链与第一节机械臂3连接,所述第二节机械臂4能够在垂面内摆动,所述第二节机械臂4的尾端设有所述旋转节5,所述旋转节5后端设有水平机械臂6,水平机械臂6的尾端设有摄像器材7;
[0030]
所述摄像器材7包括照相机,录像机其中的一种。
[0031]
伺服电机607的动力线、信号均通过密闭的过墙航空插头引出,以保持管内空腔的密闭性。
[0032]
相邻的所述首节管601、末节管603与中节管602相邻之间的管与管之间通过密封圈密封,形成能够伸缩的机械臂机构,机械臂机构腹腔内的各空腔相通、并形成密闭空腔,当气管605通气、卷筒609释放绳索时,水平机械臂6就伸长,当卷筒609卷拉绳索604时,水平机械臂6就缩回。
[0033]
水平机械臂6的伸长为气体动力,水平机械臂6的缩回靠卷筒609卷拉绳索604的拉力,水平机械臂6的伸长、或缩回的距离由伺服电机607通过卷筒 609释放、或卷拉绳索的长短控制;在实际中,气体动力大于水平机械臂6的伸缩阻力,以推动水平机械臂6的伸长,卷筒609卷拉绳索604的力大于机械臂的伸长阻力+气体动力,所以,在气体动力向前推送机械臂的管节时,卷筒609 同时释放绳索604时,机械臂才能向前伸长,机械臂向后退缩通过卷筒609卷拉绳索604实现。
[0034]
实施例2,如图1、图2和图4所示,水平机械臂6包括首节管601、至少一个中节管602、末节管603、绳索604、气管605、伺服电机607、管座608与卷筒609,所述管座608的底座设有旋转节5,所述管座608上设有所述末节管 603,所述末节管603通过所述中节管602与所述首节管601逐个叠套,所述末节管603与所述中节管602之间通过密封圈密封,所述中节管602与所述首节管601之间通过密封圈密封,所述末节管603、中节管602与首节管601之间
形成向连通密闭的空腔,气管605的一端与所述末节管603连通,所述气管605 的另一端与气源连通,绳索604的一端与所述首节管601顶端连接,所述绳索 604的另一端缠绕在卷筒609上,所述卷筒609位于所述管座608的外表面上,所述卷筒609被所述伺服电机607驱动,所述伺服电机607上罩有电机罩。
[0035]
所述首节管601、中节管602与末节管603相互之间设有导向键,以限制周向旋转。
[0036]
还包括承载车辆1、底座2、多节机械臂及其驱动系统、摄像器材7、控制系统、信息处理系统以及数据传输系统构成,多节机械臂中包括第一节机械臂3、第二机械臂4,所述第一节机械臂3为水平放置,通过轴承支承与底座2连接,所述第一节机械臂3能够在水平面内回转,所述第二节机械臂4 通过铰链与第一节机械臂3连接,所述第二节机械臂4能够在垂面内摆动,所述第二节机械臂4的尾端设有所述旋转节5,所述旋转节5后端设有水平机械臂6,水平机械臂6的尾端设有摄像器材7。
[0037]
所述摄像器材7包括照相机,录像机其中的一种。
[0038]
所述绳索604位于所述首节管601、中节管602与所述末节管603的外侧。
[0039]
所述首节管601、中节管602与末节管603为碳纤维材料首节管601、碳纤维材料中节管602、碳纤维材料末节管603,以减轻重量。
[0040]
所述绳索604放置在机械臂的外面,此时,伺服电机607和卷筒609都可以放置外面,结构简单,但绳索604保护较差,外观也不整洁。
[0041]
以上显示和描述了本发明的基本原理、主要特征及本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1