机器人驱动装置的制作方法
1.本公开涉及一种机器人驱动装置,其中,驱动部分别向关节部提供驱动力,驱动部容纳在基座中,其中,每个驱动部和关节部通过线连接,并且每个关节部由用于调节线的张力的调节部驱动。
背景技术:
2.机器人可以实现人体的运动以处理各种任务,或者可以由人佩戴以帮助人运动。机器人驱动装置的目的是自然地进行关节运动,以尽可能接近人体的运动。
3.常规的机器人驱动装置由马达、连接有减速器的驱动部以及串联关节组成。用于向每个关节部提供驱动力的驱动部将驱动力立即传递到关节部,并且邻近关节部设置,以便于控制。
4.然而,常规的机器人驱动装置存在以下问题:驱动部邻近关节部设置,因此与人体的有限尺寸相比,装置的体积较大。还存在以下问题:在每个关节位置处均设置有驱动部,因此人难以佩戴机器人。另外,即使人佩戴机器人,这种布置也可能引起不适,并且由电池供应的电力消耗很高。
5.由于装置的体积大,因此难以匹配人体的运动中心,并且存在由于重型设备的重量而导致运动速度受到限制的局限性。特别地,由于结构复杂而难以制造,从而存在制造成本增加的问题。如上所述,常规的机器人驱动装置在人体的可穿戴性和运动再现性方面具有局限性。
6.背景技术所述的内容仅旨在帮助理解本公开的背景,而并非旨在表示本公开落入本领域技术人员已知的现有技术的范围内。
技术实现要素:
7.本公开提供一种机器人驱动装置,其中,用于向关节部提供驱动力的驱动部容纳在基座中,驱动部在基座上滑动以调节线的张力,从而有效地传递驱动力。
8.用于实现该目的的根据本公开的一种机器人驱动装置可以包括:基座,设置在与机器人的关节部隔开的点处;驱动部,被安装为在基座上可移动,并且用于向关节部提供驱动力;线,连接驱动部和关节部,以将驱动部的驱动力传递到关节部;调节部,具有用于相对于基座弹性地支撑驱动部的弹性部,并且使驱动部在基座上移动以对线赋予张力;以及固定部,在驱动部移动的点处固定驱动部和基座的相对位置。
9.调节部可以包括:第一螺栓,螺纹联接到调节部并插入基座中,并且驱动部的滑动位置根据第一螺栓插入基座的长度来调节。
10.调节部可以包括:盖,通过弹性部连接到驱动部,并且第一螺栓穿透盖而插入基座中,并且当第一螺栓插入基座中时,盖按压弹性部以使驱动部滑动。
11.固定部可以包括第二螺栓,该第二螺栓穿透基座以插入驱动部中并螺纹联接到基座和驱动部,并且当第二螺栓插入驱动部中时,将驱动部固定在基座上。
12.机器人驱动装置可以进一步包括:壳体,在其内部容纳驱动部,并且设有多个通孔,其中,基座可以包括第三螺栓,该第三螺栓插入壳体的通孔中,并且壳体通过第三螺栓可滑动地固定到基座,从而驱动部滑动而不会与基座分离。
13.机器人驱动装置可以进一步包括编码器,该编码器设置在驱动部的侧面上,并且驱动部的一侧上设置绕有线的滑轮。
14.驱动部可以包括多个驱动部,关节部可以包括多个关节部,每个驱动部通过线连接到相应的一个关节部以向相应的关节部提供驱动力。
15.基座可以被构造成位于佩戴者的肩部。
16.关节部可以由佩戴者的肩关节部、肘关节部和腕关节部组成,并且肩关节部、肘关节部和腕关节部中的每一个可以独立地被驱动。
17.在传递动力时,驱动部可以根据驱动部、关节部和基座之间的间隔距离滑动以调节张力,从而独立地控制关节部的关节运动。
18.机器人驱动装置可以进一步包括:槽轮,设置在驱动部和关节部之间,以传递线的动力。
19.线可以通过在驱动部和关节部之间的某些点被鲍登线套管包围而连接。
20.驱动部可以被安装为在基座上沿靠近或远离关节部的方向滑动,并且固定部可以在驱动部滑动的点处固定驱动部的位置。
21.由于根据本公开的机器人驱动装置被构造成使得驱动部容纳在基座中并因此无需将驱动部安装为邻近每个关节部,因此机器人驱动装置的体积和重量得以减小,从而使人可以很容易地佩戴机器人驱动装置。
22.另外,驱动部可以滑动以调节线的张力,从而有效地传递驱动力并实现自然的关节运动,并且具有简单的结构,从而使机器人驱动装置的制造变得容易。
附图说明
23.结合附图并根据以下具体实施方式,将更清楚地理解本公开的上述和其它目的、特征和其它优点,其中:
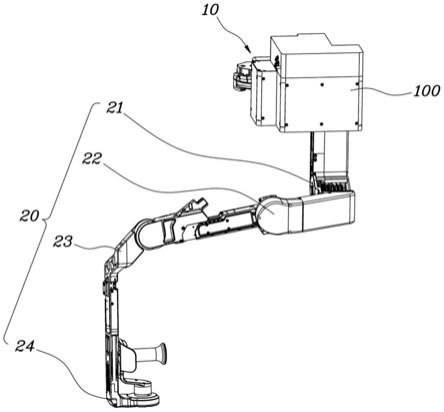
24.图1是示出根据本公开的示例性实施例的机器人驱动装置的立体图。
25.图2是根据本公开的示例性实施例的机器人驱动装置的基座的立体图。
26.图3是示出根据本公开的示例性实施例的机器人驱动装置的操作状态的示图。
27.图4是示出根据本公开的示例性实施例的机器人驱动装置中设置槽轮的状态的示图。
28.图5是示出根据本公开的示例性实施例的机器人驱动装置的线上设置鲍登线套管(bowden cable sleeve)的状态的示图。
具体实施方式
29.本文所使用的术语仅出于描述特定实施例的目的,并不旨在限制本公开。除非上下文另外明确指出,否则如本文所使用的,单数形式的“一”、“一个”和“该”也旨在包括复数形式。将进一步理解的是,术语“包括”和/或“包含”用于本说明书时,指定存在所述特征、整数、步骤、操作、元件、组件和/或其组合,但不排除存在或添加一个或多个其它特征、整数、
步骤、操作、元件、组件和/或其组合。如本文所使用的,术语“和/或”包括相关联的所列项目中一个或多个项目的任何和所有组合。在整个说明书中,除非有相反的明确描述,否则词语“包括”和诸如“包括”或“包含”的变体将被理解为暗示包括所述元件,但不排除任何其它元件。另外,说明书中描述的术语“单元”、
“-
件”、
“-
器”和“模块”是指用于处理至少一种功能和操作的单元,并且可以由硬件组件或软件组件及硬件组件和软件组件的组合来实现。
30.此外,本公开的控制逻辑可以被实现为包含由处理器、控制器等执行的可执行程序指令的计算机可读介质上的非暂时性计算机可读介质。计算机可读介质的示例包括但不限于rom、ram、光盘(cd)-rom、磁带、软盘、闪存驱动器、智能卡和光学数据存储装置。该计算机可读介质也可以分布在联网计算机系统中,使得该计算机可读介质以分布式方式被存储和执行,例如,由远程信息处理服务器或控制器局域网(can)存储和执行。
31.仅出于描述根据本公开的示例性实施例的目的示出了在本说明书或申请中公开的本公开的示例性实施例的具体结构性或功能性描述,并且可以将本公开的示例性实施例实现为各种形式,并且不应解释为本公开局限于在本说明书或申请中描述的示例性实施例。
32.由于根据本公开的示例性实施例可以进行各种改变并且具有各种形式,因此将在附图中示出并且在本说明书或申请中详细描述具体的示例性实施例。然而,这并不旨在将根据本公开的概念的示例性实施例限制为特定的公开形式,并且应当理解的是,本公开包括在本公开的思想和范围内的所有改变、等同形式和替代形式。
33.诸如第一和/或第二的术语可以用于描述各种组件,但是这些组件不应受到这些术语的限制。这些术语仅用于将一个组件与另一个组件区分开的目的,例如,在不脱离根据本公开的概念的范围的情况下,第一组件可以被命名为第二组件,并且类似地,第二组件也可以被命名为第一组件。
34.当一个组件被称为“连接”或“联接”到另一个组件时,该组件可以直接连接或联接到另一个组件,但是应该理解的是,在这些组件之间也可以存在其它组件。另一方面,当一个组件被称为“直接连接”或“直接联接”到另一个组件时,应该理解的是,这些组件之间没有其它组件。应当以相同的方式解释描述组件之间的关系的其它表述,例如“在
…
之间”和“直接在...之间”或“相邻”和“直接相邻于”。
35.在下文中,将通过参照附图说明本公开的优选示例性实施例来详细描述本公开。在每个附图中示出的相同附图标记表示相同的构件。
36.由人佩戴以辅助人体运动的机器人装置通过实现人的行为而主要用于身体不适的人。普通的机器人装置具有用于再现运动的关节部20和用于向关节部20提供动力的机器人驱动装置10,其中关节部20和机器人驱动装置10彼此相邻地设置。这是因为可以立即传递每个关节所需的动力,并且容易制造机器人装置。
37.然而,这样的机器人装置存在负载大,并且为了应对负载而增加了整体机构规格,从而导致体积和重量的增加的问题。另外,难以匹配人体的运动,并且由于重量重而导致运动速度受到限制。因此,常规的机器人装置在可穿戴性和运动再现性方面具有局限性。
38.本公开涉及一种机器人驱动装置10,其中用于向关节部20提供驱动力的驱动部200与关节部20分开设置,各关节部20所需的驱动力通过线300传递,并且采用重力补偿机构来辅助佩戴者的行为。如本文所提供的关节部20可以包括多个单独的关节部。
39.图1是示出根据本公开的示例性实施例的机器人驱动装置10的立体图,图2是根据本公开的示例性实施例的机器人驱动装置10的基座100的立体图。
40.参照图1,根据本公开的示例性实施例的机器人驱动装置10可以使基座100位于佩戴者的肩部。关节部20可以由佩戴者的肩关节部21、22,肘关节部23和腕关节部24组成。用于向(关节部20的)每个关节部提供驱动力的驱动部200可以分别设置并容纳在基座100中。即,驱动部200不与每个关节部相邻地安装,而是驱动部200容纳在基座100中,并且基座100和关节部20形成为以预定的间隔彼此隔开。每个关节部20可以由相应的驱动部200独立地驱动。
41.参照图1和图2,根据本公开的示例性实施例的机器人驱动装置10可以包括基座100、驱动部200、线300、调节部400和固定部500。
42.基座100是嵌入有用于向机器人的关节部20提供驱动力的驱动部200的装置。基座100设置在与机器人的关节部20隔开的位置。为每个关节部20设置相应的驱动部200,并且驱动部200不与关节部20相邻地设置,而是驱动部200可以被设置成与关节部20间隔开并且可以集中设置在基座100中。
43.驱动部200是用于向关节部20提供驱动力的装置。驱动部200可以是马达。驱动部200可以被安装为在基座100上可移动。对于移动的方式,驱动部200可以被安装为在靠近或远离关节部20的方向上滑动。驱动部200滑动以调节用于传递驱动力的线300的张力,从而有效地传递驱动力。
44.线300可以连接驱动部200和关节部20,以将驱动部200的驱动力传递到关节部20。线300优选地形成为环形,并且因此可以以如下形式连接:线300的一侧缠绕在驱动部200上,而另一侧缠绕在关节部20上。因此,可以根据驱动部200和关节部20之间的间隔距离来确定线300的长度。
45.当驱动部200被驱动以进行关节运动时,线300移动,并且线300的另一侧缠绕的关节部20可以旋转。由于可以根据由关节部20实现的运动的类型和位移来改变线300的张力,因此可以通过驱动部200的滑动来调节张力。
46.调节部400可用于调节线300的张力。调节部400通过弹性部410与驱动部200连接。弹性部410可以被构造成在远离基座100的方向上弹性地支撑驱动部200。驱动部200可以在基座100上滑动以对线300赋予张力。根据关节部20实现的关节运动,调节部400可以适当地调节线300的张力,从而可以实现有效的运动,以使佩戴者不会感到不适。
47.固定部500可以用于将驱动部200的位置固定在基座100上。可以在驱动部200移动的点处固定驱动部200和基座100的相对位置,以固定驱动部200不滑动。固定部500优选位于调节部400的相反侧,以有效地执行固定功能。
48.图3是示出根据本公开的示例性实施例的机器人驱动装置10的操作状态的示图。以下,将参照图3描述根据本公开的示例性实施例的机器人驱动装置10的操作原理。
49.参照图3,根据本公开的示例性实施例的机器人驱动装置10的调节部400可以包括第一螺栓420,该第一螺栓420螺纹联接到调节部400并插入基座100中。当第一螺栓420插入基座100中时,弹性部410收缩并且驱动部200可以滑动。即,调节部400与驱动部200之间的距离越来越近。驱动部200的相对位置可以通过调节插入基座100中的第一螺栓420的长度来改变。
50.根据第一螺栓420插入基座100的长度来调节弹性部410的长度,结果,可以调节驱动部200滑动的位置。可以在驱动部200的一侧上设置绕有线300的滑轮210。当驱动部200滑动并且改变位置时,可以通过滑轮210对线300的拉动或释放来调节线300的张力。
51.另外,如图3所示,调节部400可以包括盖430。盖430通过弹性部410连接到驱动部200。第一螺栓420可以穿透盖430并插入基座100中。当第一螺栓420插入基座100中时,盖430可以按压弹性部410以使驱动部200滑动。可以通过调节第一螺栓420的插入长度以调节盖430按压弹性部410的力,来使驱动部200滑动。
52.在传递驱动力以实现关节运动的情况下,线300的张力可以根据关节部20的运动类型或位移而改变。为了有效地传递驱动力,可以调节线300的张力,并且为了调节张力,在拧紧第一螺栓420的同时,盖430可以按压弹性部410。在拧紧第一螺栓420的同时,第一螺栓420插入到基座100中的长度变长,并且连接到第一螺栓420的盖430沿靠近驱动部200的方向移动。
53.由于盖430的移动,弹性部410推动驱动部200,使得驱动部200可以滑动。当驱动部200在滑动状态中通过固定部500固定在基座100上时,可以调节连接到驱动部200的线300的张力。
54.固定部500可以包括第二螺栓510。第二螺栓510可以穿透基座100并且插入驱动部200中。另外,第二螺栓510可以螺纹联接到基座100和驱动部200。当第二螺栓510插入驱动部200中时,驱动部200可以固定在基座100上。
55.参照图3,根据本公开的示例性实施例的机器人驱动装置10还可以包括壳体900。壳体900可以在其内部容纳至少一个驱动部200。壳体900可以设置有穿过壳体900形成的多个通孔910,并且设置在基座100上的第三螺栓110可以插入通孔910中。第三螺栓110的上部形成为大于通孔910的宽度以固定壳体900不与基座100分离。因此,壳体900可以通过第三螺栓110可滑动地固定到基座100,从而驱动部200可以滑动而不会与基座100分离。
56.编码器600可以设置在驱动部200的侧面上。编码器600可以通过将驱动部200的旋转速度和旋转量输出为电信号来控制关节运动。
57.基座100可以包括多个驱动部200。每个驱动部200通过线300连接到与之相对应的每个关节部20。因此,驱动部200向对应的关节部20提供驱动力,并且不会干扰其它关节部20的运动。
58.如果根据本公开的示例性实施例的机器人驱动装置10执行上肢运动,则基座100可以被构造成位于佩戴者的肩部。这是因为,佩戴者的肩膀是除头部之外的人的上半身的最高点,从而容易与每个关节部20连接。
59.在将动力传递到关节部20时,每个驱动部200可以根据关节部20与基座100之间的间隔距离滑动以调节张力。如果基座100位于肩部,则肩关节部21形成为最靠近基座100,腕关节部24形成为最远离基座100。根据基座100和关节部20的相对位置,驱动部200可以滑动以调节张力,从而独立地控制关节运动。
60.图4是示出根据本公开的示例性实施例的机器人驱动装置10中设置槽轮(sheave)700的状态的示图。
61.参照图4,根据本公开的示例性实施例的机器人驱动装置10还可以包括槽轮700。槽轮700可以设置在线300的路径上以用于传递线300的动力。槽轮700的数量可以根据驱动
部200和关节部20的隔开位置而可变地构造。
62.图5是示出根据本公开的示例性实施例的机器人驱动装置10的线300上设置鲍登线套管(bowden cable sleeve)800的状态的示图。
63.参照图5,根据本公开的示例性实施例的机器人驱动装置10的线300可以通过在某些点被鲍登线套管800包围而连接。因此,如果动力部件和关节部20彼此间隔开,则可以有效地传递线300的动力。
64.尽管相对于特定示例性实施例示出和描述了本公开,但是对于本领域技术人员显而易见的是,在不脱离由所附权利要求书提供的本公开的技术思想的情况下,可以对本公开进行各种改进和改变。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1