[0001]
本发明涉及教育服务机器人领域,特别是涉及一种应用于钢琴教学的机械手教学平台及控制方法。
背景技术:[0002]
钢琴弹奏是一项专业的手部运动技能。其各种弹奏法对手的姿态、手指触键的力度、速度等均有严格的规范。钢琴弹奏的早期指法练习是形成规范动作的关键时期,初学者需要学习正确的动作要领、大量的弹奏训练以及对错误姿势和动作的及时更正。
[0003]
目前钢琴教学一般采用教师一对一辅导和学习者自主训练相结合的方式。这种方式存在很多问题,比如教师的工作量大且多为重复性工作、初学者自主训练动作不规范、练习枯燥缺乏兴趣、学习进展缓慢等。
技术实现要素:[0004]
本发明的目的是为了克服现有技术中的不足,提供一种应用于钢琴教学的机械手教学平台及其控制方法,以解决钢琴初学者在初期指法练习中易出现错误弹奏动作的问题。
[0005]
本发明的目的是通过以下技术方案实现的:
[0006]
一种应用于钢琴教学的机械手教学平台,包括角度传感器、midi键盘、蓝牙串口模块、下位机模块、上位机模块、直流电机、钢琴教学机械手和平台基座;所述角度传感器用于实时检测钢琴教学机械手的转动角度信息;所述midi键盘用于采集手指的触键力度信息;所述蓝牙串口模块用于下位机模块和上位机模块的通讯;
[0007]
所述平台基座用于装配直流电机和钢琴教学机械手,并限制直流电机和钢琴教学机械手之间传动绳索的路径,通过上下两条直角形走向的圆形导槽安装绳索索套,绳索穿过上下两条索套与直流电机轴端驱动轮和掌指关节转动轮连接;所述圆形导槽的中心线分别与直流电机轴端驱动轮和掌指关节转动轮相切;
[0008]
所述直流电机集成有减速箱和编码器;
[0009]
所述钢琴教学机械手采用欠驱动的驱动方式,通过掌指关节转动轮驱动近指关节转动轮,近指关节转动轮驱动远指关节转动轮的方式实现欠驱动传动;所述钢琴教学机械手传动方式为绳索传动,绳索两端分别连接在直流电机轴端驱动轮和掌指关节转动轮上。
[0010]
进一步的,所述下位机模块包括驱动底板和微控制器,所述驱动底板包括电源电路、角度传感器接口电路、电机驱动电路、蓝牙串口接口电路和微控制器接口电路,所述微控制器与驱动底板通过微控制器接口电路相连接,通过角度传感器接口电路接收角度传感器采集到的钢琴教学机械手的转动角度数据,并对数据进行滤波处理,通过电机驱动电路驱动直流电机控制钢琴教学机械手的转动动作。
[0011]
进一步的,所述上位机模块包括midi消息解析模块、蓝牙虚拟串口模块、触键动作轨迹规划模块和轨迹显示检测模块,midi消息解析模块用于接收并解析midi键盘发送的
midi消息,得到手指触键的实际触键力信息,蓝牙虚拟串口模块用于上位机模块和下位机模块的通讯,触键动作轨迹规划模块通过设定的目标触键力和解析得到的实际触键力的差值规划下一次的手指触键动作轨迹,轨迹显示检测模块通过蓝牙虚拟串口模块接收实际的手指触键动作数据,并绘制为手指触键动作轨迹曲线,实现轨迹的实时检测。
[0012]
一种应用于钢琴教学的机械手教学平台控制方法,钢琴教学过程的控制包括以下步骤:
[0013]
(1)钢琴初学者将手掌掌心放置在手掌固定板处,调整近指指节上下结构以适应手指长度,上紧定螺钉固定近指指节的长度,连接固定皮套,完成对钢琴教学机械手的穿戴;
[0014]
(2)在上位机模块设定需要训练的目标触键力,上位机根据目标触键力设定初始的目标手指触键动作轨迹,点击开始练习按钮;
[0015]
(3)上位机模块通过蓝牙串口将目标手指触键动作轨迹发送至下位机模块,下位机模块根据目标手指触键动作轨迹和角度传感器实时采集的钢琴教学机械手的转动角度的差值计算直流电机的控制率,控制钢琴教学机械手对目标手指触键动作轨迹进行轨迹跟踪;
[0016]
(4)钢琴教学机械手带动钢琴初学者手指触击midi键盘,完成一次触键动作;
[0017]
(5)上位机模块接收并解析midi键盘发送的midi消息,根据目标触键力和实际触键力的差值对目标手指触键动作轨迹进行修正;
[0018]
(6)重复步骤(3)到步骤(5),钢琴教学机械手带动手指进行重复的手指触键训练动作,达到钢琴教学的目的。
[0019]
6.根据权利要求4所述一种应用于钢琴教学的机械手教学平台控制方法,其特征在于,钢琴教学机械手带动钢琴初学者手指对手指触键动作轨迹进行跟踪是通过速度位置双闭环pid控制算法实现的。
[0020]
与现有技术相比,本发明的技术方案所带来的有益效果是:
[0021]
本发明的应用于钢琴教学的机械手教学平台及控制方法,能够在钢琴学习初期的指法训练中帮助钢琴初学者进行手指触键练习。在训练过程中,下位机模块通过角度传感器实时采集的钢琴教学机械手的转动角度作为反馈值,带动钢琴初学者手指跟踪目标手指触键动作轨迹。在完成一次触键动作后,上位机模块通过midi键盘得到实际触键力,根据目标触键力和实际触键力的差值对目标手指触键动作轨迹进行修正后发送至下位机模块。通过这种重复迭代的训练方法,钢琴初学者能够形成规范的手指触键动作,并且能够在保持规范的手指触键动作的同时,很好的控制触键力,从而弹奏出准确的音色。本发明可以很好地修正钢琴初学者在初期指法练习中的错误动作,且训练过程操作简单,具有良好的应用前景。
附图说明
[0022]
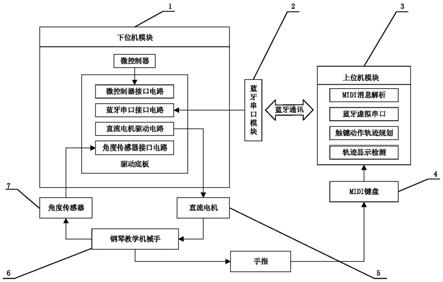
图1是本发明钢琴教学机械手教学平台的系统框图。
[0023]
图2是本发明钢琴教学机械手教学平台的结构装配示意图。
[0024]
图3是本发明钢琴教学机械手的结构装配示意图。
[0025]
图4是本发明钢琴教学机械手教学平台的控制方法框图。
[0026]
图5是本发明钢琴教学机械手教学平台的上位机模块界面显示图。
[0027]
图6是本发明钢琴教学机械手教学平台的穿戴训练示意图。
具体实施方式
[0028]
以下结合附图和具体实施例对本发明作进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0029]
一种应用于钢琴教学的机械手教学平台,包括角度传感器7、midi键盘4、蓝牙串口模块2、下位机模块1、上位机模块3、直流电机5、钢琴教学机械手6和平台基座8。
[0030]
角度传感器7安装在钢琴教学机械手的掌指关节6-4上方,用于实时检测钢琴教学机械手6的转动角度信息。
[0031]
midi键盘4用于采集手指的触键力度信息。
[0032]
蓝牙串口模块2用于下位机模块1和上位机模块3的通讯。
[0033]
下位机模块1,包括驱动底板和微控制器,所述驱动底板包括电源电路、角度传感器接口电路、电机驱动电路、蓝牙串口接口电路和微控制器接口电路,微控制器与驱动底板通过微控制器接口电路相连接,通过角度传感器接口电路接收角度传感器7采集到的钢琴教学机械手6的转动角度数据,并对数据进行滤波处理,通过电机驱动电路驱动直流电机5控制钢琴教学机械手6的转动动作。
[0034]
上位机模块3包括midi消息解析模块、蓝牙虚拟串口模块、触键动作轨迹规划模块和轨迹显示检测模块,midi消息解析模块用于接收并解析midi键盘发送的midi消息,得到手指触键的触键信息,蓝牙虚拟串口模块用于上位机模块3和下位机模块1的通讯,触键动作轨迹规划模块通过设定的目标触键力和解析得到的实际触键力的差值规划下一次的手指触键动作轨迹,轨迹显示检测模块通过蓝牙虚拟串口模块接收实际的手指触键动作数据,并将其绘制为手指触键动作轨迹曲线,可实现轨迹的实时检测。
[0035]
直流电机5集成了减速箱和编码器。
[0036]
钢琴教学机械手6采用欠驱动的驱动方式,通过掌指关节转动轮6-6驱动近指关节转动轮6-7,近指关节转动轮6-7驱动远指关节转动轮6-1的方式实现欠驱动传动。所述钢琴教学机械手6传动方式为绳索传动,绳索两端分别连接在直流电机轴端驱动轮和掌指关节转动轮6-6上。所述直流电机轴端驱动轮通过中心的d形槽与电机轴配合。
[0037]
所述平台基座8用于装配直流电机5和钢琴教学机械手6,并限制其传动绳索的路径,通过上下两条直角形走向的圆形导槽8-1安装绳索索套,绳索穿过上下两条索套与直流电机轴端驱动轮和掌指关节转动轮6-6连接。所述圆形导槽的中心线分别与直流电机轴端驱动轮和掌指关节转动轮6-6相切。
[0038]
优选地,本实施例中角度传感器7采用mpu6050六轴传感器,与钢琴教学机械手掌指关节6-4采用胶接的方式连接。midi键盘4选用midiplus x mini系列键盘。微控制器采用stm32f407系列芯片。电机驱动电路内设置有h桥驱动芯片tb6612fng。
[0039]
优选地,本实施例中上位机模块3采用c#开发,运行在windows操作系统上。上位机模块显示界面如图5所示,包括角度信息接收区9、轨迹显示检测区10、触键信息接收区11、蓝牙虚拟串口配置区12和训练配置区13。
[0040]
优选地,钢琴教学机械手6和平台基座8均采用3d打印加工制作,材料选择sla光敏
树脂。
[0041]
一种应用于钢琴教学的机械手教学平台控制方法,如图4所示,包括以下步骤:
[0042]
(1)钢琴初学者将手掌掌心放置在手掌固定板6-5处,调整近指指节的上下结构6-2和6-3以适应手指长度,上紧定螺钉固定近指指节的长度,连接固定皮套,完成对钢琴教学机械手6的穿戴。
[0043]
(2)在上位机模块3的训练配置区13处设定需要训练的目标触键力,上位机模块根据目标触键力设定初始的目标手指触键动作轨迹,然后点击开始练习按钮。
[0044]
(3)上位机模块3通过蓝牙虚拟串口模块将目标手指触键动作轨迹发送至下位机模块1,下位机模块1根据目标手指触键动作轨迹和角度传感器7实时采集的钢琴教学机械手的转动角度的差值的比例、积分和微分的组合计算直流电机5的控制率,控制钢琴教学机械手6对目标手指触键动作轨迹进行轨迹跟踪。
[0045]
(4)钢琴教学机械手6带动钢琴初学者手指触击midi键盘4的琴键,完成一次手指触键动作。
[0046]
(5)上位机模块3接收并解析midi键盘4发送的midi消息,根据目标触键力和实际触键力的差值对目标手指触键动作轨迹进行修正。
[0047]
(6)重复步骤(3)到步骤(5),钢琴教学机械手6带动手指进行重复的手指触键训练动作,达到钢琴教学的目的。
[0048]
图6展示了基于上述机械手教学平台进行穿戴训练的示意图。该教学平台能够在钢琴学习初期的指法训练中帮助钢琴初学者进行手指触键练习,通过带动钢琴初学者手指进行弹奏训练,使钢琴初学者形成规范的手指触键动作,并且能够在保持规范的手指触键动作的同时,很好的控制触键力,从而弹奏出准确的音色,为以后的钢琴弹奏学习打下扎实的基本功。
[0049]
本发明并不限于上文描述的实施方式。以上对具体实施方式的描述旨在描述和说明本发明的技术方案,上述的具体实施方式仅仅是示意性的,并不是限制性的。在不脱离本发明宗旨和权利要求所保护的范围情况下,本领域的普通技术人员在本发明的启示下还可做出很多形式的具体变换,这些均属于本发明的保护范围之内。