一种具有力觉感知的多自由度操作机器人
1.本发明涉及机器人自动化领域,具体地,涉及一种具有力觉感知的多自由度操作机器人。
背景技术:
2.经对现有技术的文献检索发现,公开号为cn107856021a的中国专利提出了一种多自由度机器人,具有较大的动作范围和较多的自由度,但是运动学逆解有多解,求解复杂,同时还要解决各个促动器之间联动的问题,控制难度大,控制成本高;公开号为cn105751213a的中国专利提出了一种控制较为简便的多自由度机器人机械手机构,机构较为简单,控制简便,但是由于使用了丝杠
‑
螺母机构,所以响应较慢,同时使用了液压机构,所以精度较低;公开号为cn205588298u的中国专利提出了一种结构简单的多自由度机器人机械手机构,同样也具有响应缓慢,自由度较少的缺点。公开号为cn111820952a的中国专利一种移动式咽拭子取样机器人,虽然动作灵活,具有较多自由度,但是控制机构为一个多轴联动的机械手结构,控制复杂,同时配套设置与执行机构分离,不够便携。
3.目前的多自由度操作机器人仍存在包括结构复杂、控制成本高或是精度较低、自由度较少、响应缓慢、无法很好地与力觉感知相融合等问题,无法适用于一些特定的场合。
4.因此,需要开发一种结构简单,控制成本低并且精度较高的具有力觉反馈的多自由度操作机器人。
技术实现要素:
5.针对现有技术中的缺陷,本发明的目的是提供一种具有力觉感知的多自由度操作机器人。
6.本发明提供一种具有力觉感知的多自由度操作机器人,包括:
7.末端执行部件;
8.与所述末端执行部件连接的传动部件;所述传动部件设置于能沿竖向做升降运动的升降平台上,所述传动部件与所述升降平台可同步运动;通过所述传动部件带动所述末端执行部件实现多自由度的运动;
9.设置于所述末端执行部件上的力觉感知装置,用于反馈执行件所受外力;
10.与所述末端执行部件偏心设置的第一促动器;所述第一促动器驱动所述末端执行部件绕其轴心在竖直平面上做圆周运动;
11.与所述传动部件连接的第二促动器、第三促动器,其中,所述第二促动器驱动所述传动部件沿其所在平面内做水平方向的直线运动,从而带动所述末端执行部件在水平面内沿水平方向做直线运动;所述第三促动器驱动所述传动部件做俯仰运动,带动所述末端执行部件做俯仰运动;使所述机器人实现包括末端执行件空间位置以及俯仰角姿态的四个自由度。
12.优选地,所述传动部件包括:
13.设置于所述升降平台上的旋转支撑平台;所述旋转支撑平台能做旋转运动,并在所述升降平台的带动下进行同步运动;
14.设置于所述旋转支撑平台上方的导轨底座,所述导轨底座的下方设有垂直于导轨方向的传动轴;所述传动轴的两端面分别设有凸出的第一平面轴、第二平面轴;
15.设置于所述旋转支撑平台上的轴承支承座,所述轴承支座上设有与所述传动轴连接的第一轴承;
16.设置于所述导轨底座上方的导轨;所述导轨上设有与其相配合的滑块,所述滑块能沿导轨方向移动;
17.与所述滑块连接的移动平台,所述移动平台在所述滑块的带动下进行同步移动;
18.第一连杆,所述第一连杆的下端通过第二轴承与所述移动平台侧面连接;
19.第二连杆,所述第二连杆的上端通过第三轴承与所述第一连杆的上端连接,所述第二连杆的下端用于连接所述第二促动器;所述第三轴承的轴向与水平方向平行;
20.所述第二连杆在所述第二促动器的作用下做圆周运动,所述第一连杆的上端点与所述第二连杆的一端通过第三轴承连接,做圆周运动,所述第一连杆的下端点与所述移动平台连接做沿所述导轨方向上的直线运动;所述滑块、所述移动平台、所述第一连杆、所述第二连杆的运动均位于同一竖直平面内。
21.优选地,所述导轨具有与所述滑块相配合的t型滑槽;所述t型滑槽的底部具有沉头通孔,以便使所述导轨通过连接件固定于所述导轨底座上。
22.优选地,所述第二连杆的上端设有第一盖板,所述第一盖板延伸至所述第二连杆的中段,并通过连接件与所述第二连杆固定;所述第三轴承通过紧配合置于所述盖板和所述第二连杆的中间;
23.优选地,所述第一连杆的上端、下端分别设有凸出的轴;所述第一连杆的上端凸出的轴与所述第三轴承内圈配合,并通过连接件和所述第三轴承另一侧的轴承挡块相连;且所述第一连杆的上端凸出的轴与所述第三轴承同轴;所述第三轴承的轴向与所述第二促动器的主动轴的轴向平行;
24.优选地,所述移动平台侧面设有与所述第二轴承的外圈配合的沉头,同时所述沉头外侧通过第二盖板将所述第二轴承固定于所述移动平台内,所述第二盖板通过连接件固定在所述移动平台上;所述第一连杆的下端凸出的轴通过连接件和第二轴承另一侧的轴承挡块相连,所述第一连杆的下端凸出的轴与所述第二轴承同轴设置。
25.优选地,具有力觉感知的多自由度操作机器人包括:设置于所述传动轴一侧的断电抱闸装置;所述断电抱闸装置包括:
26.设置于所述旋转支撑平台上的抱闸支撑座,所述抱闸支撑座的下方通过螺栓与所述旋转支撑平台固定;
27.设置于所述抱闸支撑座上的抱闸;所述抱闸设置于所述传动轴的一侧,所述抱闸通过第一法兰盘与所述传动轴的第一平面轴连接;所述抱闸与所述传动轴同轴设置;当设备断电时所述抱闸抱紧所述导轨底座下方的传动轴,使所述导轨姿态在断电阶段处于锁死状态,同时减轻所述第三促动器主动轴所受的周向力。
28.优选地,所述第三促动器设置于所述旋转支撑平台上,并位于所述导轨底座的另一侧;所述第三促动器通过第二法兰盘与所述传动轴的第二平面轴连接;所述第三促动器、
所述传动轴以及所述抱闸同轴设置;在通电情况下,所述第三促动器的主动轴带动所述导轨底座下方的传动轴转动,调整上方所述导轨俯仰角;此时所述抱闸起到了轴承的作用。
29.优选地,所述第二促动器设置于所述导轨底座的端部,并靠近于所述导轨的一端;所述第二促动器通过第三法兰盘与所述第二连杆的下端固定。
30.优选地,所述末端执行部件包括:
31.与所述第一促动器同轴设置的底座;
32.设置于所述底座上的外壳;所述外壳具有水平容置空间,且所述水平容置空间的一端为敞口端,所述水平容置空间的敞口端与所述底座连接,使所述敞口端封闭形成封闭空间;
33.设置于所述水平容置空间一端的执行件安装座;且所述执行件安装座与所述底座偏心设置;
34.与所述执行件安装座固定的执行件;所述执行件的一端穿过所述外壳插入所述执行件安装座内并通过顶紧螺钉固定;且所述执行件与所述底座偏心设置;所述第一促动器带动所述底座绕自身轴心转动,使所述执行件安装座可绕所述底座的轴心在垂直于所述导轨方向的平面上做圆周运动;
35.设置于所述水平容置空间敞口端的弹簧,所述弹簧的一端与所述执行件安装座的末端连接,所述弹簧的另一端抵住所述底座。
36.优选地,所述执行件安装座的一端沿轴向设有用于插接所述执行件的安装孔,且所述安装孔与所述执行件为间隙配合,通过所述顶紧螺钉固定。
37.优选地,所述力觉感知装置包括:
38.设置于所述弹簧另一端的第一压力传感器,所述第一压力传感器与所述弹簧的另一端连接;所述第一压力传感器用于采集所述执行件所受到的轴向力;
39.设置于所述执行件安装座一侧的第二压力传感器;
40.设置于所述执行件安装座另一侧的第三压力传感器,所述第三压力传感器与所述第二压力传感器对称布置;所述第二压力传感器与所述第三压力传感器用于采集所述执行件受到的周向力以及水平面上垂直于所述导轨方向的力。
41.与现有技术相比,本发明具有如下至少一种的有益效果:
42.本发明上述机器人,在传动链上依次设置三个促动器作为主动机构,并相互串联,结构简单、控制简单,控制成本低;适用于对末端执行机构的多自由度有效精确控制,具有精度高、结构简单、动态响应快及控制成本低等优点,可控制末端执行机构在可控范围内的全方位运动。
43.本发明上述机器人,集成度高,便携性好,可以安装于任意的静平台上,环境适应性好。
44.本发明上述机器人,末端执行机构内设有力传感器,使整个机构具有力觉反馈,适用范围更加广泛。
附图说明
45.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
46.图1是本发明一优选实施例具有力觉感知的多自由度操作机器人的结构示意图;
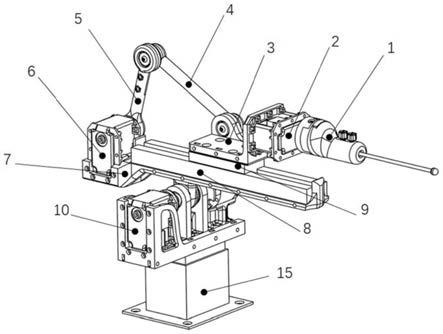
47.图2是本发明一优选实施例具有力觉感知的多自由度操作机器人另一角度的结构示意图;
48.图3是本发明一优选实施例末端执行部件的结构示意图;
49.图4是图3的剖视图;
50.图5是本发明一优选实施例力觉感知装置安装于末端执行部件内的剖视图;
51.图中标记分别表示为:末端执行部件1、第一促动器2、移动平台3、第一连杆4、第二连杆5、第二促动器6、导轨底座7、导轨8、滑块9、第三促动器10、抱闸11、抱闸支撑座12、轴承支承座13a、轴承支承座13b、旋转支撑平台14、升降平台15、外壳101、底座102、执行件103、顶紧螺钉104、弹簧105、执行件安装座106、第一压力传感器107c、第二压力传感器107a、第三压力传感器107b。
具体实施方式
52.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进。这些都属于本发明的保护范围。
53.参照图1所示,为本发明一优选实施例具有力觉感知的多自由度操作机器人的结构示意图,包括:传动部件、末端执行部件1、力觉感知装置、第一促动器2、第二促动器6和第三促动器10。
54.传动部件设置于能沿竖向做升降运动的升降平台15上,传动部件与升降平台15可同步运动。升降平台15可固定于任意平台上。升降平台15可以扩展末端执行部件1在竖直平面内的活动范围。
55.末端执行部件1与传动部件连接,通过传动部件带动末端执行部件1实现多自由度的运动。
56.力觉感知装置设置于末端执行部件1上,用于反馈执行件103所受外力。
57.第一促动器2与末端执行部件1偏心安装;第一促动器2驱动末端执行部件1绕其轴心在竖直平面上做圆周运动。
58.第二促动器6、第三促动器10与传动部件连接,其中,第二促动器6驱动传动部件沿其所在平面内做水平方向的直线运动,从而带动末端执行部件1在水平面内沿水平方向做直线运动。第三促动器10驱动传动部件做俯仰运动,从而带动末端执行部件1做俯仰运动;使机器人实现包括末端执行件103空间位置以及俯仰角姿态的四个自由度。
59.上述具有力觉感知的多自由度操作机器人通过在传动链上串联三个促动器控制的并有力觉感知的闭环机构,相比其他使用多关节机械臂结构等所构成的多自由度操作机器人,具有结构简单,控制成本低,精度较高等优点;整个机构可安装于静平台,传动部分结构简单,由促动器控制,所以动态响应快。
60.在其他部分优选实施例中,传动部件包括旋转支撑平台14、导轨底座7、轴承支承座13a、轴承支承座13b、导轨8、滑块9、移动平台3、第一连杆4和第二连杆5;其中,
61.旋转支撑平台14通过螺栓固定于升降平台15上;旋转支撑平台14能做旋转运动,
并在升降平台15的带动下进行同步运动。
62.导轨底座7设置于旋转支撑平台14上方,导轨底座7的下方设有传动轴,且传动轴与导轨方向相垂直;传动轴的两端面分别设有凸出的第一平面轴、第二平面轴。
63.设置于旋转支撑平台14上的轴承支承座13a和轴承支承座13b,轴承支座13a、轴承支承座13b上均设有与传动轴连接的第一轴承。
64.导轨8通过螺栓固定于导轨底座7上方。在导轨8上连接有与其相配合的滑块9,滑块9能沿导轨8方向移动。滑块9被导轨8约束仅在导轨8平面和导轨8方向上运动。
65.移动平台3通过螺栓固定于滑块9上,移动平台3在滑块9的带动下进行同步移动。第一促动器2可以通过螺栓固定于移动平台3上。
66.第一连杆4的下端通过第二轴承与移动平台3侧面连接。
67.第二连杆5的上端通过第三轴承与第一连杆4的上端连接,第二连杆5的下端用于连接第二促动器6;第三轴承的轴向与水平方向平行;由移动平台3、滑块9、导轨8、第一连杆4、第二连杆5和第二促动器6构成曲柄滑块机构。第二连杆5在第二促动器6的作用下做圆周运动,第一连杆4的上端点与第二连杆5的一端通过第三轴承连接,做圆周运动,第一连杆4的下端点与移动平台3连接做沿导轨8方向上的直线运动;滑块9、移动平台3、第一连杆4、第二连杆5的运动均位于同一竖直平面内。
68.在其他部分优选实施例中,导轨8具有与滑块9相配合的t型滑槽,使滑块9能沿t型滑槽方向进行前后移动;t型滑槽的底部具有沉头通孔,以便使导轨8通过连接件固定于导轨底座7上。采用t型滑槽结构便于拆卸和安装。
69.在其他部分优选实施例中,第二连杆5的上端侧面设有第一盖板,第一盖板与第二连杆5相配合,第一盖板主要是为了轴承的安装。第一盖板延伸至第二连杆5的中段,并通过连接件(可以采用螺栓)固定于第二连杆5上;第三轴承通过紧配合置于第一盖板和第二连杆5的中间。第二促动器6的主动轴通过法兰盘与第二连杆5的没有盖板的一端通过螺栓相连。
70.第一连杆4的上端、下端分别设有凸出的轴;第一连杆4的上端凸出的轴与第二连杆5中的第三轴承内圈配合,并通过连接件(可以采用螺栓)和第三轴承另一侧的轴承挡块相连;且第一连杆4的上端凸出的轴与第三轴承同轴;第三轴承的轴向与第二促动器6的主动轴的轴向平行。
71.在移动平台3侧面设有与第二轴承的外圈配合的沉头,同时沉头外侧通过第二盖板将第二轴承固定于移动平台3内,第二盖板通过连接件(可以采用螺栓)固定在移动平台3上;第一连杆4的下端凸出的轴通过连接件(可以采用螺栓)和第二轴承另一侧的轴承挡块相连,第一连杆4的下端凸出的轴与第二轴承同轴设置。
72.在其他部分优选实施例中,轴承支撑座13的上方台阶孔的大孔与第一轴承外缘配合,外侧小孔端面辅助第一轴承的轴向定位;轴承支撑座13下方设有加强筋,并且根据受力分布内侧加强筋要高于外侧加强筋。
73.在其他部分优选实施例中,具有力觉感知的多自由度操作机器人进一步设置断电抱闸装置;断电抱闸装置包括:抱闸支撑座12和抱闸11。
74.抱闸支撑座12设置于旋转支撑平台14上,抱闸支撑座12的下方通过螺栓与旋转支撑平台14固定。
75.抱闸11设置于抱闸支撑座上;抱闸11设置于传动轴的一侧,抱闸11通过第一法兰盘与传动轴的第一平面轴连接;抱闸11与传动轴同轴设置;当设备断电时抱闸11抱紧导轨底座7下方的传动轴,使导轨8姿态在断电阶段处于锁死状态,同时减轻第三促动器10主动轴所受的周向力。
76.在其他部分优选实施例中,第三促动器10通过螺纹孔安装于旋转支撑平台1414上,并位于导轨底座7的另一侧;第三促动器10通过第二法兰盘与传动轴的第二平面轴连接;第三促动器10、传动轴以及抱闸11同轴设置。在通电情况下,第三促动器10的主动轴带动导轨底座7下方的传动轴转动,调整上方导轨8俯仰角;此时抱闸11起到了轴承的作用,减轻第三促动器10主动轴所受的周向力。
77.第二促动器6通过安装孔和螺栓固定于导轨底座7上,且第二促动器6位于导轨底座7的端部,并靠近于导轨8的一端;第二促动器6通过第三法兰盘与第二连杆5的下端固定。
78.通过第三促动器10和第二促动器6的主动控制,让末端执行部件1可达平行于导轨8方向的竖直平面内的限定范围内的任意位置;同时第三促动器10还可以控制导轨8的俯仰角。
79.在其他部分优选实施例中,结合图3、图4及图5所示,末端执行部件11通过法兰盘固定于第一促动器2的转轴上;末端执行部件1包括:底座102、外壳101、执行件103和弹簧105;其中,底座102通过螺栓与第一促动器2的法兰盘相连。底座102与第一促动器2同轴;第一促动器2通过螺栓固定于移动平台3上。
80.外壳101的一端与底座102的一端面可通过螺栓连接;外壳101具有水平容置空间,且水平容置空间的一端为敞口端,水平容置空间的敞口端与底座102连接,通过底座102的端面使敞口端封闭形成封闭空间。采用外壳101可将执行件安装座106、弹簧105以及力觉感知装置包裹在封闭空间内。
81.执行件安装座106安装在水平容置空间一端;且执行件安装座106与底座102偏心安装;第一促动器2带动底座102绕自身轴心转动,使执行件安装座106可绕底座102的轴心在垂直于导轨8方向的平面上做圆周运动。
82.执行件103与执行件安装座106固定;执行件103的一端穿过外壳101插入执行件安装座106内并通过两个顶紧螺钉104固定;且执行件103与底座102偏心设置。
83.弹簧105设置于水平容置空间敞口端,弹簧105的一端与执行件安装座106的末端连接,弹簧105的另一端抵住底座102。弹簧105能沿轴向发生弹性形变。
84.在其他部分优选实施例中,执行件安装座106的一端沿轴向设有用于插接执行件103的安装孔,且安装孔与执行件103为间隙配合,通过顶紧螺钉104固定。
85.在其他部分优选实施例中,参照图5所示,力觉感知装置包括第一压力传感器107c、第二压力传感器107a和第三压力传感器107b;其中,
86.第一压力传感器107c贴于底座102上,第一压力传感器107c设置于弹簧105另一端的端部,即将弹簧105的另一端部抵住第一压力传感器107c。第一压力传感器107c采集执行件103所受到的轴向力。
87.第二压力传感器107a设置于执行件安装座106一侧;可以将第二压力传感器107a贴于执行件安装座106的侧面上;第三压力传感器107b设置于执行件安装座106另一侧;第三压力传感器107b与第二压力传感器107a对称布置;可以将第三压力传感器107b贴于执行
件安装座106另一侧的侧面上;第二压力传感器107a与第三压力传感器107b用于采集执行件103受到的周向力以及水平面上垂直于导轨方向的力。
88.第一压力传感器107c、第二压力传感器107a和第三压力传感器107b均位于同一水平面内。
89.上述实施例所述的具有力觉感知的多自由度操作机器人可应用于各种标本的采集,执行件103可视为被操作对象,例如咽拭子等,通过升降平台15、第三促动器10、第二促动器6、第一促动器2以及末端执行件安装座106的固定连接,可实现对咽拭子的全方位控制,而且咽拭子的采集机构的末端位置和姿态与各个主动机构的运动参数之间一一对应,易得运动学逆解,极大地降低了控制复杂度。
90.以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变形或修改,这并不影响本发明的实质。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1