一种齿轮传动机构及智能门锁的制作方法
1.本发明涉及智能门锁技术领域,尤其涉及一种齿轮传动机构及智能门锁。
背景技术:
2.现有智能门锁产品所配套的齿轮传动机构:主要是选用市面上常见的标准减速箱和电机配套使用,受门锁供电电压的高低偏差和空间布局以及结构的间隙等等因素影响,在传动机构的输出端很难实现精准的行程管控,往往只能通过加大运动空程间隙,增加时间驱动等补偿方式弥补,在一定程度上容易产生传动效率低、噪音大、功耗高等不良结果。
3.因此,现有技术还有待进一步的改进。
技术实现要素:
4.鉴于上述现有技术的不足,本发明的目的在于提供一种齿轮传动机构及智能门锁,旨在解决现有智能门锁配套使用的齿轮传动机构的输出端难以实现准确的行程管控的问题。
5.第一方面,本发明提供一种齿轮传动机构,其中,包括:
6.动力装置,包括输出端及第一齿轮,所述第一齿轮固定在所述输出端上;
7.减速装置,包括外壳体、端盖、齿轮结构及第一感应元件;
8.所述端盖与所述外壳体固定连接,构成容纳腔体;所述齿轮结构设置在所述腔体内部,所述第一感应元件固定在所述齿轮结构上;所述齿轮结构与所述第一齿轮啮合;
9.主控pcba组件;以及
10.传动检测pcba组件,包括与所述第一感应元件相适配的传感器;所述传动检测pcba组件固定在所述端盖内部,且与所述主控制pcba组件通信连接。
11.可选地,所述的齿轮传动机构,其中,所述外壳体的内壁设置有齿,所述齿轮结构包括:
12.行星齿轮组,包括行星齿轮,所述行星齿轮与所述齿啮合;以及
13.传动架,包括本体、第一固定部及带输出轴的第二齿轮;所述第一固定部与所述第二齿轮分别固定在所述本体的两端面上;所述行星齿轮可旋转地固定在所述第一固定部上。
14.可选地,所述的齿轮传动机构,其中,所述齿轮传动机构还包括:
15.底板,所述底板设置在所述外壳体与所述端盖之间,且分别与所述外壳体及所述端盖固定连接;
16.离合齿轮,所述离合齿轮与所述第二齿轮啮合;以及
17.第三齿轮,所述第三齿轮与所述离合齿轮啮合;
18.所述第三齿轮与所述离合齿轮设置在所述底板与所述端盖之间。
19.可选地,所述的齿轮传动机构,其中,还包括:
20.第一转动片及第二转动片,所述离合齿轮夹装在所述第一转动片与所述第二转动
片之间;当受到驱动时,围绕所述第二齿轮做啮合旋转运动;
21.第二感应元件,所述第二感应元件固定在所述离合齿轮上;以及
22.离合检测pcba组件,包括与所述第二感应原件相适配的感应器;所述离合检测pcba组件固定在所述底板朝向所述减速装置的侧面上,且与所述主控pcba组件通信连接。
23.可选地,所述的齿轮传动机构,其中,所述离合齿轮包括用于固定的第一圆轴及第二圆轴;所述第一转动片包括:供所述第二齿轮通过的第一通孔以及用于与所述第一圆轴适配的接合部;所述第二转动片包括用于与所述第二圆轴适配的接合部以及供所述输出轴通过的第二通孔;所述第二感应元件固定在所述第一圆轴上,当所述第二感应元件触发与自身适配的所述感应器输出信号时,所述主控pcba组件对所述信号进行判断,关闭所述动力装置,使所述离合齿轮与所述第三齿轮脱离。
24.可选地,所述的齿轮传动机构,其中,所述行星齿轮组还包括行星架及太阳齿轮,所述太阳齿轮固定在所述行星架上,所述太阳齿轮与所述行星齿轮啮合。
25.可选地,所述的齿轮传动机构,其中,所述行星架包括一级星架及二级行星架;所述行星齿轮包括一级行星齿轮、二级行星齿轮及三级行星齿轮;所述一级行星齿轮与所述第一齿轮啮合,所述一级行星架上的太阳齿轮与所述二级行星齿轮啮合,所述二级行星架上的太阳齿轮与所述三级行星齿轮啮合。
26.可选地,所述的齿轮传动机构,其中,所述底板设置有腔体,所述腔体内设置圆弧端面;
27.所述所述端盖设置有凸起筋位,所述凸起筋位上设置圆弧端面;
28.所述第三齿轮与所述离合齿轮啮合转动时,所述第一转动片的圆弧端面与所述底板的圆弧端面重合限位;
29.所述第二转动片的圆弧端面与所述端盖的凸起筋位的圆弧端面重合限位,使所述第三齿轮与离合齿轮的啮合传动有效。
30.可选地,所述的齿轮传动机构,其中,所述主控pcba组件包括:用于驱动所述动力装置的驱动芯片、用于控制输入所述动力装置电压的稳压芯片、用于控制输入所述动力装置电流的电流控制芯片以及用于输出连接线的外接端口。
31.第二方面,一种智能门锁,其中,包括如上所述的齿轮传动机构。
附图说明
32.图1为本发明实施例提供的一种齿轮传动机构的立体图;
33.图2为图1中a
‑
a方向剖视图;
34.图3为本发明实施例提供的减速装置的爆炸图;
35.图4为本发明实施例提供的减速装置的另一视角的爆炸图;
36.图5为本发明实施例提供的另一齿轮传动机构的局部爆炸图;
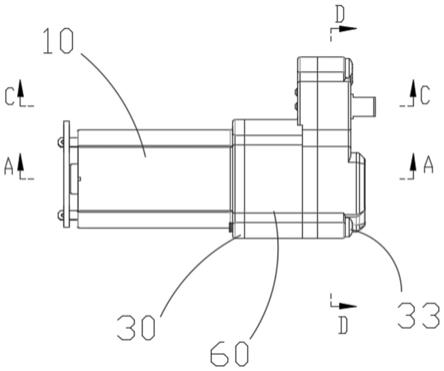
37.图6为本发明实施例提供的另一齿轮传动机构的立体图;
38.图7a为图6所示的齿轮传动机构的爆炸图;
39.图7b为底板结构示意图;
40.图7c为端盖结构示意图;
41.图8为图6中a
‑
a方向剖视图;
42.图9为图6中c
‑
c方向剖视图;
43.图10为图6中d
‑
d方向剖视图;
44.图11为本发明实施例提供的齿轮传动机构的齿轮啮合示意图;
45.图12a、12b分别为本发明实施例提供的齿轮传动机构的旋转脱离示意图。
具体实施方式
46.为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述。附图中给出了本发明的较佳实施方式。但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施方式。相反地,提供这些实施方式的目的是使对本发明的公开内容理解的更加透彻全面。
47.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本发明。
48.现有电子防盗门锁,需要采用齿轮旋转机构用于与电机配套,但是现有的齿轮旋转装置,因为其布局及空间因素,在智能门锁供电电压出现波动时,难以实现精确的行程管控。
49.基于此,本发明提供一种能够解决上述技术问题的方案,其详细内容将在后续实施例中得以阐述。
50.请参考图1至图2,如图所示,本发明实施例提供一种齿轮传动机构,包括:动力装置10、动力装置固定板30、减速装置60、主控pcba组件20以及传动检测pcba组件72。所述动力装置固定板30的中心孔与动力装置10的外壳定位圆柱过盈配合并通过螺钉33固定在动力装置外壳前端,减速装置60固定在所述动力装置固定板30上。所述主控pcba组件20可以固定在所述动力装置端部(与所述动力装置固定板30异端),所述传动检测pcba组件72固定在所述减速装置60内部。通过所述传动检测pcba获得的减速装置运转的信号,主控主控pcba组件可以根据该信号对减速装置进行控制,从而实现准确管控齿轮传动机构的输出端的行程。
51.在本实施例中,结合图7,所述装置固定板30与减速装置60之间还设置有挡板50,通过设置挡板可以减少固定板与减速装置之间的摩擦力。
52.在本实施例中,所述动力装置10包括输出端11及第一齿轮40,所述第一齿轮40固定在所述输出端11上;所述减速装置60包括:外壳体61、端盖80、齿轮结构62及第一感应元件57;所述外壳体61与所述端盖80可以通过螺栓33固定在一起。所述动力装置10与所述减速装置60的外壳体61通过固定螺栓固定在一起。
53.在本实施例中,结合图7,所述动力装置包括电机12,在所述电机的输出轴11上套接第一齿轮(电机齿轮)40,所述电机齿轮40与所述电机转轴11过盈配合。所述外壳体61的内部设置有齿63;所述齿轮结构62可以是三级行星齿轮,包括一级行星齿轮65、二级行星齿轮66及三级行星齿轮67、一级行星架68及二级行星架69、太阳齿轮55以及传动架87,其中,行星齿轮、行星架以及太阳齿轮组合形成行星齿轮组。所述行星齿轮通过固定在所述行星架上的安装固定柱,安装在所述行星架上,所述太阳齿轮固定在所述行星架的中部,容易理解的是,同一行星架上的行星齿轮与太阳齿轮是异面设置的。所述行星齿轮与所述外壳体
61内壁上的齿啮合,组成一个完整的三级行星齿轮减速装置。
54.在本实施例中,所述传动架87包括本体86、第一固定部88及带输出轴的第二齿轮59;所述第一固定部88与所述第二齿轮59分别固定在所述本体86的两端面上;所述三级行星齿轮可旋转地固定在所述第一固定部88上。
55.在本实施例中,所述第一感应元件57固定在所述转动架的本体上,用于与传动检测pcba组件72上的传感器相适配。所述的第一感应元件57可以是磁钢,相应的所述传动检测pcba组件72上的传感器为磁控传感器。所述传动检测pcba组件固定在所述端盖内部。由电机齿轮转动带动行星齿轮转动,进而带动所述第二齿轮转动,当固定在传动架本体上的磁钢与传动检测pcba组件上的磁控传感器靠近,触发信号,由传动检测pcba组件将该信号传递给主控pcba,由主控pcba来对输出转轴的旋转行程进行控制。
56.进一步地,可以通过设置不同数量的传感器和磁钢,采用编列配合的方法,可以在主控pcba上实现输出转轴不同旋转角度的控制。
57.在本实施例中,结合图7a,所述主控pcba组件通过电机上的接电触点焊接在电机尾端,主控pcba组件上设置外接端口输出外接连接线,接收外部指令信号;主控pcba组件与安装在端盖内的离合检测pcba和安装与底板70内的传动检测pcba通过通信连接线实现信号传递;主控pcba组件设置驱动芯片(未示出)、稳压芯片(未示出)和电流控制芯片(未示出),实现电机驱动过程的合理有效的驱动。
58.在本实施例一种实现方式中,结合图7,所述齿轮传动机构还包括:底板70,所述底板设置在所述外壳体61与所述端盖80之间,且分别与所述外壳体61及所述端盖80固定连接;离合齿轮17,所述离合齿轮17与所述第二齿轮59啮合;以及第三齿轮90,所述第三齿轮90与所述离合齿轮17啮合;所述第三齿轮90与所述离合齿轮17设置在所述底板70与所述端盖80之间。
59.所述第三齿轮也可以称作传动齿90,所述传动齿90一端伸出一扁轴(该扁轴伸出在端盖外部)作为齿轮传动机构的输出转轴。
60.在本实施例中,在第二齿轮59的侧边设置一个离合齿轮17与其啮合,同时再设置一个第三齿轮90,作为传动齿轮,通过第二齿轮59、离合齿轮17及第三齿轮90三者之间的配合,可以实现不同减速比的力矩输出效果。
61.在本实施例的一种实现方式中,所述离合齿轮两端还设置有第一转动28片和第二转动片27,所述离合齿轮夹装在所述第一转动片28和第二转动片27之间。结合7b至图7c,所述底板70设置有腔体703,所述腔体703分别设置圆弧端面705,所述所述端盖80设置有凸起筋位803,所述凸起筋位803设置分别设置圆弧端面805,所述第三齿轮90与所述离合齿轮17啮合转动,所述第一转动片28的圆弧端面285与所述底板70的圆弧端面705重合限位;所述第二转动片27的圆弧端面275与所述端盖80的凸起筋位283的圆弧端面805重合限位,以保证所述第三齿轮90与离合齿轮17的啮合传动有效。
62.当其受到驱动时,可以围绕所述第二齿轮17做啮合旋转运动。在所述离合齿轮17上还固定有第二感应元件56,所述第二感应元件56可以是磁钢。在所述底板朝向所述减速装置的侧面上固定有离合检测pcba组件72,且与所述主控pcba组件通信连接。所述离合检测pcba组件包括与所述第二感应原件相适配的感应器,如磁控感应器。容易理解的是,所述磁钢固定在所述离合齿轮靠近所述磁控感应器的端面上。在所述离合检测pcba组件与所述
底板之间夹设有挡磁片37,通过设置挡磁片可以防止磁控感应器被误触发。
63.在本实施例中,所述离合齿轮17包括用于固定的第一圆轴及第二圆轴(未示出);所述第一转动片28包括:供所述第二齿轮17通过的第一通孔280以及用于与所述第一圆轴适配的接合部281;所述第二转动片包括用于与所述第二圆轴适配的接合部271以及供所述输出轴通过的第二通孔270;所述第二感应元件固定在所述第一圆轴上,当所述第二感应元件56触发与自身适配的所述感应器输出信号时,所述主控pcba组件对所述信号进行判断,关闭所述电机,使所述离合齿轮与所述第三齿轮实现脱离,如图12b所示。
64.在本实施例的一种实现方式中,所述传动齿90设置有用于固定的圆轴(未示出),将圆轴套装在底板和端盖上与之适配的圆孔内700、800,可以将传动齿90固定在底板与端盖之间,同时可以在所述传动齿90靠近所述底板的端面上固定设置磁钢58,当离合齿啮合传动齿带动传动齿旋转运动时,磁钢与安装在底板上的传动检测pcba组件上的磁控传感器配合输出信号;通过设置不同数量的传感器和磁钢,采用编列配合的方法,可以在主控pcba组件上实现输出转轴不同旋转角度的控制。
65.在本实施例中,如图12a,当电机处于无驱动静止状态时:通过给传动齿90上的输出转轴施加反向旋转动力,传动齿90旋转带动离合齿旋转至一定角度,可以使传动齿和离合齿轮脱离啮合状态,此时传动齿的旋转运动的阻力将大大减小传动齿与离合齿的啮合。
66.在本实施例的一种实现方式中,当电机驱动过程中遇到输出力矩变化较大时,可通过主控pcba组件上的电流控制芯片、离合检测pcba组件和传动检测pcba组件的磁控传感器的位置状态,组合分辨信息,判断异常及时中断驱动,实现防止电机堵转功能。
67.基于相同的发明构思,本发明还提供一种智能门锁,所述智能门锁包括上述所述齿轮传动机构。其中,所述齿轮传动机构的具体结构,上述已经进行描述,在此不做赘述。
68.综上,本发明提供一种齿轮传动机构及智能门锁,包括:动力装置,包括输出端及第一齿轮,所述第一齿轮固定在所述输出端上;减速装置,包括外壳体、端盖、齿轮结构及第一感应元件;所述端盖与所述外壳体固定连接,构成容纳腔体;所述齿轮结构设置在所述腔体内部,所述第一感应元件固定在所述齿轮结构上;所述齿轮结构与所述第一齿轮啮合;主控pcba组件;以及传动检测pcba组件,包括与所述第一感应元件相适配的传感器;所述传动检测pcba组件固定在所述端盖内部,且与所述主控制pcba组件通信连接。该齿轮传动机构,空间布局合理,机械传动装换效率高,设置的检测装置位于传动机构输出端位置,更加利于提高检测判断的可靠性和准确性,传动机构设置离合齿脱离与啮合的离合机构,既保证了电机动力输出端的动力传递效果,也合理降低了输出转轴端机械转动摩擦力,可应用范围更加广泛,实现性能大大提高。
69.应当理解的是,本发明的应用不限于上述的举例,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,所有这些改进和变换都应属于本发明所附权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1