一种磁性软体机器人的驱动方法及系统
1.本发明属于磁控仿生软体机器人领域,更具体地,涉及一种磁性软体机器人的驱动方法及系统。
背景技术:
2.与传统的刚性机器人相比,软体机器人具有优异的灵活性、柔韧性以及无限的自由度,适用于复杂的非结构化环境和安全的人机交互,在生物医学以及仿生学领域引起广泛关注。由于尺蠖的爬行机制简单且易实现,衍生了大量仿尺蠖型软体机器人研究。迄今为止,典型的控制策略包含气动、液压、形状记忆合金、光、电压、磁场控制等,其中磁场控制具备无接触、穿透性强、能量转化效率高等优点而备受青睐。
3.同时,传统的软体机器人驱动方法,往往受到有线束缚、自身携带供能装置或者响应速度的制约,造成软体机器人本身或者控制系统十分笨重、运动速度较慢的缺点,如何通过简化驱动装置及方法提高软体机器人运动灵活性及速度亟待进一步研究。
技术实现要素:
4.针对现有技术的缺陷,本发明的目的在于提供一种磁性软体机器人的驱动方法及系统,旨在解决现阶段软体机器人驱动灵活性受限、运动速度较慢的问题。
5.为实现上述目的,第一方面,本发明提供了一种磁性软体机器人的驱动方法,包括如下步骤:
6.确定磁性软体机器人;所述磁性软体机器人包括多条臂,各条臂沿着磁性软体机器人的中心呈中心对称且轴对称分布;所述磁性软体机器人包括至少一个对称轴,其内部磁性粒子的磁矩呈中心对称分布;当所述磁性软体机器人包括两条臂时,其对称轴为磁性软体机器人两条臂所在的直线;
7.在磁性软体机器人对称轴的下方提供方向变化的磁场;所述磁场的方向由与磁性软体机器人一侧呈锐角到直角,再呈锐角变化;或所述磁场的方向由与磁性软体机器人的一侧呈锐角到直角,再呈钝角变化;
8.在所述磁场的作用下,所述磁性软体机器人沿受到磁场作用的对称轴爬行运动。
9.其中,所述磁场的方向变化的同时,其磁场强度也可以发生变化。
10.在一个可能的实施例中,所述磁场为均匀磁场或中心聚焦,四周发散的磁场。
11.在一个可能的实施例中,所述磁场的方向变化方式为连续变化或者梯度变化。
12.在一个可能的实施例中,所述磁性软体机器人由柔性材料与磁性粒子均匀混合固化制成,通过外部磁化实现所述磁性粒子磁矩重新排列,呈中心对称分布。
13.在一个可能的实施例中,当所述磁性软体机器人内部磁性粒子的磁矩呈中心对称的发散分布时,所述磁场方向朝向所述磁性软体机器人所在平面的下方;
14.当所述磁性软体机器人内部磁性粒子的磁矩呈中心对称的汇聚分布时,所述磁场方向朝向所述磁性软体机器人所在平面的上方。
15.在一个可能的实施例中,当所述磁场为中心聚焦,四周发散的磁场时,所述磁场的磁场中心位于包含其作用的磁性软体机器人对称轴所在平面,且该平面与所述磁性软体机器人所在的平面垂直。
16.在一个可能的实施例中,循环往复的向磁性软体机器人提供所述方向变化的磁场,以控制磁性软体机器人连续爬行运动。
17.第二方面,本发明提供了一种磁性软体机器人的驱动系统,包括:
18.磁化状态确定单元,用于确定磁性软体机器人;所述磁性软体机器人包括多条臂,各条臂沿着磁性软体机器人的中心呈中心对称且轴对称分布;所述磁性软体机器人包括至少一个对称轴,其内部磁性粒子的磁矩呈中心对称分布;当所述磁性软体机器人包括两条臂时,其对称轴为磁性软体机器人两条臂所在的直线;
19.驱动磁场提供单元,用于在磁性软体机器人对称轴的下方提供方向变化的磁场;所述磁场的方向由与磁性软体机器人一侧呈锐角到直角,再呈锐角变化;或所述磁场的方向由与磁性软体机器人的一侧呈锐角到直角,再呈钝角变化;在所述磁场的作用下,所述磁性软体机器人沿受到磁场作用的对称轴爬行运动。
20.在一个可能的实施例中,所述驱动磁场提供单元提供的磁场为均匀磁场或中心聚焦,四周发散的磁场;磁场的方向变化方式为连续变化或者梯度变化;
21.当所述驱动磁场提供单元提供的磁场为中心聚焦,四周发散的磁场时,其将提供磁场的磁场中心位于包含其作用的磁性软体机器人对称轴所在平面,且该平面与所述磁性软体机器人所在的平面垂直。
22.在一个可能的实施例中,当所述磁性软体机器人内部磁性粒子的磁矩呈中心对称的发散分布时,所述驱动磁场提供单元提供的磁场方向朝向所述磁性软体机器人所在平面的下方;
23.当所述磁性软体机器人内部磁性粒子的磁矩呈中心对称的汇聚分布时,所述驱动磁场提供单元提供的磁场方向朝向所述磁性软体机器人所在平面的上方。
24.总体而言,通过本发明所构思的以上技术方案与现有技术相比,具有以下有益效果:
25.本发明提供了一种磁性软体机器人的驱动方法及系统,驱动磁场与磁性软体机器人相互独立,相比气动、液压等驱动方式,软体机器人自身无需携带供能装置,软体机器人本体可以实现更轻薄和灵活的结构设计,且可进行远程无线操控;该驱动方法具有更高的响应速度和可控性,相比在软体机器人内部嵌入磁铁,再利用永磁体梯度力的直接拖拽,本发明基于磁场对软体机器人内部磁矩的磁转矩偏转作用,利用磁性软体机器人两侧对动态磁场的非对称响应,实现磁性软体机器人的规律性周期爬行运动。
附图说明
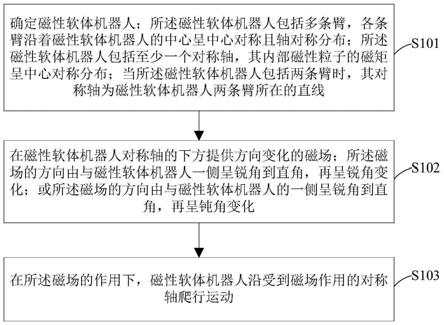
26.图1为本发明实施例提供的磁性软体机器人的驱动方法流程图;
27.图2为本发明实施例提供的磁性软体机器人磁矩分布情况图;
28.图3为本发明实施例提供的磁性软体机器人不同数量对称轴的分布情况图;
29.图4为本发明实施例提供的磁性软体机器人第一种磁矩分布情况下的第一种磁场分布图;
30.图5为本发明实施例提供的磁性软体机器人第二种磁矩分布情况下的第一种磁场分布图;
31.图6为本发明实施例提供的第一种磁场的驱动过程细化示意图;
32.图7为本发明实施例提供的磁性软体机器人第一种磁矩分布情况下的第二种磁场分布图;
33.图8为本发明实施例提供的磁性软体机器人第二种磁矩分布情况下的第二种磁场分布图;
34.图9为本发明实施例提供的第二种磁场的驱动过程细化示意图;
35.图10为本发明实施例提供的磁性软体机器人的驱动系统架构图。
具体实施方式
36.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
37.本发明提供一种磁性软体机器人的驱动方法,实现磁性软体机器人速度和方向可控的往复运动。其中,所述磁性软体机器人为磁性粒子与柔性材料复合物,充磁后具有中心对称的内部磁化分布。
38.图1为本发明实施例提供的磁性软体机器人的驱动方法流程图;如图1所示,包括如下步骤:
39.s101,确定磁性软体机器人;所述磁性软体机器人包括多条臂,各条臂沿着磁性软体机器人的中心呈中心对称且轴对称分布;所述磁性软体机器人包括至少一个对称轴,其内部磁性粒子的磁矩呈中心对称分布;当所述磁性软体机器人包括两条臂时,其对称轴为磁性软体机器人两条臂所在的直线;
40.s102,在磁性软体机器人对称轴的下方提供方向变化的磁场;所述磁场的方向由与磁性软体机器人一侧呈锐角到直角,再呈锐角变化;或所述磁场的方向由与磁性软体机器人的一侧呈锐角到直角,再呈钝角变化;
41.s103,在所述磁场的作用下,所述磁性软体机器人沿受到磁场作用的对称轴爬行运动。
42.图2为本发明实施例提供的磁性软体机器人不同磁矩分布情况图;如图2中的(a)和(b)可知,磁性软体机器人的磁矩方向可以呈中心汇聚或者中心发散。
43.图3为本发明实施例提供的磁性软体机器人不同数量对称轴的分布情况图;图3中仅以磁矩中心汇聚为例进行说明,若磁矩呈中心发散,同样适用。如图3中的(a)、(b)以及(c)可知,磁性软体机器人的臂可以有偶数条,各条臂沿着磁性软体机器人的中心呈中心对称且轴对称分布;磁性软体机器人包括至少一个对称轴,图3中的虚线表示对称轴。当磁性软体机器人包括两条臂时,其对称轴为磁性软体机器人两条臂所在的直线。
44.可见,当磁性软体机器人包括2m条臂时,m大于1;其有n条对称轴,2≤n≤m;n和m均为整数。
45.具体地,设或中心聚焦,四周发散的磁场为第一种磁场,均匀磁场为第二种磁场。
46.图4为本发明实施例提供的磁性软体机器人第一种磁矩分布情况下的第一种磁场
分布图;当磁性软体机器人内部磁性粒子的磁矩呈中心对称的汇聚分布时,第一种磁场的磁场方向垂直所述磁性软体机器人所在平面的向上。
47.图5为本发明实施例提供的磁性软体机器人第二种磁矩分布情况下的第一种磁场分布图;当磁性软体机器人内部磁性粒子的磁矩呈中心对称的发散分布时,第一种磁场的磁场方向垂直所述磁性软体机器人所在平面向下。
48.图6为本发明实施例提供的第一种磁场的驱动过程细化示意图;图6中11表示磁性粒子及其磁矩方向,19表示磁场。如图6所示,当第一种磁场位于驱动距离以外,对应驱动磁场方向与机器人右侧磁性粒子的磁矩方向相同,故忽略磁对齐效应,软体机器人无明显变形(状态一)。当第一种磁场沿
‑
x方向移动,驱动磁场幅值增强并且磁场方向超前于右侧磁性粒子磁矩偏转方向δ(δ>θ),从而产生顺时针方向的磁转矩,其等效力f1垂直作用在磁矩单元两侧,向软体机器人右足施加向下的压力,进一步增加与地面接触点的静摩擦力,导致软体机器人右足固定,左侧由于右侧变形的拖曳效应而向x方向运动(状态二)。当第一种磁场移动到机器人正下方时,对应机器人中心区域的驱动磁场约等于
‑
90
°
。此时,机器人两侧的磁响应达到对称,实现了第一阶段位移(状态三)。之后第一种磁场沿x方向移动,机器人右侧磁性粒子磁矩偏转方向δ滞后于驱动磁场方向θ(δ<θ),从而产生逆时针方向的磁转矩,其等效力f2在机器人的右足施加向上的推力,减小相应的静摩擦力,从而使机器人右侧抬起并向前伸平(状态四)。随着第一种磁场最终远离软体机器人,机器人爬行运动后重新恢复到初始状态。通过改变第一种磁场的运动方向,从而控制软体机器人的爬行方向,实现连续的双向运动。其中,
‑
x方向指的是x轴负轴方向,x方向指的是x轴正轴方向。
49.图7为本发明实施例提供的磁性软体机器人第一种磁矩分布情况下的第二种磁场分布图;当磁性软体机器人内部磁性粒子的磁矩呈中心对称的发散分布时,第二种磁场的磁场方向朝向所述磁性软体机器人所在平面的下方。
50.图8为本发明实施例提供的磁性软体机器人第二种磁矩分布情况下的第二种磁场分布图;当磁性软体机器人内部磁性粒子的磁矩呈中心对称的汇聚分布时,第二种磁场的磁场方向朝向所述磁性软体机器人所在平面的上方。
51.图9为本发明实施例提供的第二种磁场分布的驱动过程细化示意图。图9为不同匀强磁场方向下条形磁性软体机器人的非对称的磁转矩响应图。其中,第二种磁场又可理解为x方向磁场和y方向磁场的组合磁场;其中,x轴和y轴所在的平面为:与磁性软体机器人垂直且包含第二种磁场作用的对称轴的平面。第二种磁场作用的对称轴为x轴。
52.动作部分
①
:在x
‑
和y
‑
方向组合磁场作用下,磁控条状软体机器人的“后脚”受到x+方向的磁转矩,此时磁转矩具有非对称性。由于软体具有连续性,因此“后脚”的弯曲同样影响部分“前脚”区域,从而使磁控条状软体机器人的中心向x+方向发生偏移。
53.具体地,磁转矩公式和磁场强度公式分别如下:
54.τ=μ0m
×
h
xy
[0055][0056]
其中h
xy
是第二种磁场的理想磁场强度,m是磁性软体机器人内部的磁化强度,μ0是空气磁导率,τ表示磁转矩。
[0057]
图4中τ
m1
,τ
m2
,τ
′
m2
,τ
m3
分别指的是不同运动部分时“前脚”和“后脚”所受到的磁转
矩大小及方向,b
xy
指的是第二种磁场的磁感应强度大小及方向,α指的是第二种磁场的磁场强度方向与x+方向的夹角大小。
[0058]
可以理解的是,当磁性软体机器人前脚和后脚,即前臂和后臂,或者对称轴一侧的臂与对称轴另一侧的臂受到的磁转矩大小不同或者无法相互抵消时,则磁性软体机器人受到的磁转矩具有非对称性。
[0059]
动作部分
②
:在y
‑
方向组合磁场作用下,磁控条状软体机器人的“后脚”受到x+方向的磁转矩,同时其“前脚”受到x
‑
方向的磁转矩,相互作用下磁控条状软体机器人中部呈现向上的运动趋势。
[0060]
动作部分
③
:在x+和y
‑
方向组合磁场作用下,磁控条状软体机器人的“前脚”受到x+方向的磁转矩,此时磁转矩具有非对称性。相应地“前脚”的弯曲同样影响部分“后脚”区域,从而使磁控条状软体机器人的中心向x+方向发生偏移。
[0061]
动作部分
④
:在x+方向组合磁场作用下,磁控条状软体机器人的“前脚”继续向x+方向发生偏转直至爬行运动完成。
[0062]
其中,需要说明的是,x+和y+方向分别指的是x轴正向和y轴正向方向;x+
‑
和y
‑
方向分别指的是x轴负向和y轴负向方向。
[0063]
在实际应用场合中,控制磁场方向使磁控条状软体机器人重复运动部分
①‑③
,从而可以实现该机器人的连续运动,类似地,通过改变运动部分顺序,能够使其实现往复运动。
[0064]
需要说明的是,本实施例利用有限元仿真软件模拟磁控条状软体机器人在二维动态磁场下实现爬行的过程,证明该控制过程的可行性。
[0065]
在一个更具体的实施例中,第一种磁场可通过永磁体实现,且第一种磁场在磁性软体机器人处的变化可通过改变永磁体与磁性软体机器人的相对距离实现;第二种磁场可通过组合电磁驱动线圈实现,每组电磁驱动线圈的两个线圈通入相同大小的电流,在其轴向产生磁场,每组电磁驱动线圈的轴向可任意设置,以在所述间隔空间产生任意方向的合成磁场。
[0066]
图10为本发明实施例提供的磁性软体机器人的驱动系统架构图,如图10所示,包括:
[0067]
磁化状态确定单元1010,用于确定磁性软体机器人;所述磁性软体机器人包括多条臂,各条臂沿着磁性软体机器人的中心呈中心对称且轴对称分布;所述磁性软体机器人包括至少一个对称轴,其内部磁性粒子的磁矩呈中心对称分布;当所述磁性软体机器人包括两条臂时,其对称轴为磁性软体机器人两条臂所在的直线;
[0068]
驱动磁场提供单元1020,用于在磁性软体机器人对称轴的下方提供方向变化的磁场;所述磁场的方向由与磁性软体机器人一侧呈锐角到直角,再呈锐角变化;或所述磁场的方向由与磁性软体机器人的一侧呈锐角到直角,再呈钝角变化;在所述磁场的作用下,所述磁性软体机器人沿受到磁场作用的对称轴爬行运动。
[0069]
具体地,图10中各个单元的功能详细可参见前述实施例中的介绍,在此不做赘述。
[0070]
本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1