一种空间辅助运动机构、误差补偿系统的制作方法
[0001]
本实用新型涉及一种空间辅助运动机构、误差补偿系统,属于误差补偿领域。
背景技术:
[0002]
关节臂式坐标测量机在现代工业测量和反求工程等应用领域中具有重要作用,但商业产品的关节臂式坐标测量机都是处于不开源的状态,无法修改其控制器中的相应参数,而且在采集用于标定关节臂式坐标测量机的数据时,一般是在二维平面进行采点,采集面与面之间距离数据时采用的是标准量块,以至使出现采集的数据点空间代表性不足,位置精度不高等现象。
技术实现要素:
[0003]
本实用新型提供了一种空间辅助运动机构以用于构建关节臂式坐标测量机进行空间采点的平台,提供了一种关节臂式坐标测量机惯性力误差补偿系统,以用于实现与空间辅助运动机构的连接,并用于根据空间辅助运动机构位置的调整,获得关节臂式坐标测量机的关节角度和关节臂式坐标测量机的末端位置坐标,并进而提供关节臂式坐标测量机惯性力误差补偿的平台。
[0004]
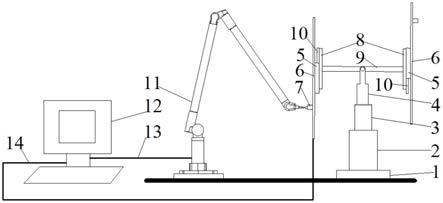
本实用新型的技术方案是:一种空间辅助运动机构,包括旋盘底座1、一级支撑杆2、二级支撑杆3、三级支撑杆4、光栅尺滑轨盘5、光栅尺6、圆锥孔柱7、侧边旋盘8、旋转杆轴9、直线滑轨10;工作台上从下往上依次连接有旋盘底座1、一级支撑杆2、二级支撑杆3、三级支撑杆4,三级支撑杆4的上端与旋转杆轴9中端连接,旋转杆轴9两端分别连接一个侧边旋盘8,每个侧边旋盘8通过直线滑轨10与一个光栅尺滑轨盘5连接,每个光栅尺滑轨盘5上安装光栅尺6,圆锥孔柱7固定在光栅尺6上。
[0005]
所述旋盘底座1与一级支撑杆2,一级支撑杆2与二级支撑杆3,二级支撑杆3 与三级支撑杆4,三级支撑杆4与旋转杆轴9,侧边旋盘8与旋转杆轴9,直线滑轨 10与侧边旋盘8,光栅尺滑轨盘5与光栅尺6,圆锥孔柱7与光栅尺6,光栅尺滑轨盘5与直线滑轨10采用可拆卸连接。
[0006]
所述旋盘底座1与一级支撑杆2采用螺栓连接、一级支撑杆2与二级支撑杆3 采用螺栓连接、二级支撑杆3与三级支撑杆4采用螺栓连接;三级支撑杆4与旋转杆轴9采用铰接方式连接,并采用螺栓固定的方式;侧边旋盘8和旋转杆轴9采用螺栓固定;直线滑轨10采用螺栓连接固定在侧边旋盘8上;所述光栅尺滑轨盘5和光栅尺6采用螺栓连接;所述圆锥孔柱7通过螺栓固定在光栅尺6上;所述光栅尺滑轨盘5和直线滑轨10可以保持相对运动,采用螺栓进行连接固定。
[0007]
一种误差补偿系统,包括空间辅助运动机构、关节臂式坐标测量机11、计算机 12;其中关节臂式坐标测量机11在空间辅助运动机构的圆锥孔柱7处进行采点,采集的数据通过关节臂式坐标测量机数据传输线13传送到计算机12。
[0008]
还包括光栅尺数据传输线14,将光栅尺数据传输线14一端与计算机12连接,另一
端与光栅尺6连接。
[0009]
本实用新型的有益效果是:本实用新型中的空间辅助运动机构可以有效地与关节臂式坐标测量机进行连接,并为关节臂式坐标测量机提供空间采点的平台;本实用新型提供的关节臂式坐标测量机惯性力误差补偿系统通过空间辅助运动机构的辅助运动可以有效地采集关节臂式坐标测量机的关节角度和关节臂式坐标测量机的末端位置坐标并传输至计算机。
附图说明
[0010]
图1为本实用新型完整的关节臂式坐标测量机惯性力误差补偿系统示意图;
[0011]
图2为本实用新型空间辅助运动机构的部分拆解示意图;
[0012]
图3为本实用新型空间辅助运动机构的x方向变换示意图;
[0013]
图4为本实用新型空间辅助运动机构的y方向变换示意图;
[0014]
图5为本实用新型中旋盘底座与一级支撑杆剖视图;
[0015]
图6为本实用新型中二级支撑杆剖视图;
[0016]
图7为本实用新型中三级支撑杆剖视图;
[0017]
图8为本实用新型旋转杆轴整体示意图;
[0018]
图9为本实用新型旋转杆轴剖视图一;
[0019]
图10为本实用新型旋转杆轴剖视图二;
[0020]
图11为本实用新型光栅尺滑轨盘剖视图与俯视图;
[0021]
图12为本实用新型光栅尺滑轨盘俯视图;
[0022]
图13为本实用新型侧边旋盘与旋转杆轴连接示意剖视图;
[0023]
图14为本实用新型直线滑轨整体效果图;
[0024]
图15为本实用新型直线滑轨俯视图;
[0025]
图16为本实用新型直线滑轨侧视图;
[0026]
图17为本实用新型空间辅助运动机构中所有螺栓连接处示意图。
[0027]
图中各标号为:1-旋盘底座、2-一级支撑杆、3-二级支撑杆、4-三级支撑杆、5
-ꢀ
光栅尺滑轨盘、6-光栅尺、7-圆锥孔柱、8-侧边旋盘、9-旋转杆轴、10-直线滑轨、11
-ꢀ
关节臂式坐标测量机、12-计算机、13-关节臂式坐标测量机数据传输线、14-光栅尺数据传输线。
具体实施方式
[0028]
下面结合附图和实施例,对本实用新型作进一步说明,但本实用新型的内容并不限于所述范围。
[0029]
实施例1:如图1-17所示,一种空间辅助运动机构,包括旋盘底座1、一级支撑杆2、二级支撑杆3、三级支撑杆4、光栅尺滑轨盘5、光栅尺6、圆锥孔柱7、侧边旋盘8、旋转杆轴9、直线滑轨10;工作台上从下往上依次连接有旋盘底座1、一级支撑杆2、二级支撑杆3、三级支撑杆4,三级支撑杆4的上端与旋转杆轴9中端连接,旋转杆轴9两端分别连接一个侧边旋盘8,每个侧边旋盘8通过直线滑轨10与一个光栅尺滑轨盘5连接,每个光栅尺滑轨盘5上安装光栅尺6,圆锥孔柱7固定在光栅尺6上。
[0030]
进一步地,可以设置所述旋盘底座1与一级支撑杆2,一级支撑杆2与二级支撑杆3,
二级支撑杆3与三级支撑杆4,三级支撑杆4与旋转杆轴9,侧边旋盘8与旋转杆轴9,直线滑轨10与侧边旋盘8,光栅尺滑轨盘5与光栅尺6,圆锥孔柱7与光栅尺6,光栅尺滑轨盘5与直线滑轨10采用可拆卸连接。
[0031]
进一步地,可以设置所述旋盘底座1与一级支撑杆2采用螺栓连接、一级支撑杆2与二级支撑杆3采用螺栓连接、二级支撑杆3与三级支撑杆4采用螺栓连接;三级支撑杆4与旋转杆轴9采用铰接方式连接,并采用螺栓固定的方式;侧边旋盘8 和旋转杆轴9采用螺栓固定;直线滑轨10采用螺栓连接固定在侧边旋盘8上;所述光栅尺滑轨盘5和光栅尺6采用螺栓连接;所述圆锥孔柱7通过螺栓固定在光栅尺6 上;所述光栅尺滑轨盘5和直线滑轨10可以保持相对运动,采用螺栓进行连接固定。
[0032]
本实用新型中所述旋盘底座1位于空间辅助运动机构底部,承载着整个空间辅助运动机构;旋转杆轴9两端分别连接一个侧边旋盘8,用于平衡重力,同时,可以方便两台关节臂式坐标测量机11工作;同时也便于同一台关节臂式坐标测量机11 通过不同位置的圆锥孔柱进行测量。
[0033]
一种误差补偿系统,包括空间辅助运动机构、关节臂式坐标测量机11、计算机12;其中关节臂式坐标测量机11在空间辅助运动机构的圆锥孔柱7处进行采点,采集的数据通过关节臂式坐标测量机数据传输线13传送到计算机12。
[0034]
进一步地,可以设置还包括光栅尺数据传输线14,将光栅尺数据传输线14一端与计算机12连接,另一端与光栅尺6连接。
[0035]
所述空间辅助运动机构具有xyz三个方向的自由度,使得关节臂式坐标测量机能够采集到工作空间内任意位置的数据点。
[0036]
通过本系统,可以使用如下方法进行误差补偿:
[0037]
步骤1、将空间辅助运动机构的旋盘底座1和关节臂式坐标测量机11分别固定在工作台(如桌面)上;空间辅助运动机构中旋盘底座1的中心与关节臂式坐标测量机11底座中心的距离控制在关节臂式坐标测量机11测量范围的30%~80%内;在此范围内可以确保关节臂式坐标测量机11的有效测量精度;
[0038]
步骤2、将关节臂式坐标测量机数据传输线13一端与计算机12连接,另一端与关节臂式坐标测量机11连接;
[0039]
步骤3、打开关节臂式坐标测量机11电源;
[0040]
步骤4、调整空间辅助运动机构:松动一级支撑杆2与二级支撑杆3、二级支撑杆3与三级支撑杆4之间的螺栓调节机构的整体高度与转动方向,改变机构在z方向的自由度(移动自由度和转动自由度);松动旋转杆轴9与三级支撑杆4之间的螺栓,转动铰接处,改变旋转杆轴9两端连接的装置在x方向的转动自由度;松动侧边旋盘8和旋转杆轴9之间的螺栓,转动侧边旋盘8,改变光栅尺滑轨盘5、光栅尺 6、圆锥孔柱7和直线滑轨10在y方向的转动自由度;松动光栅尺滑轨盘5与直线滑轨10之间的螺栓,滑动光栅尺滑轨盘5改变圆锥孔柱7和光栅尺6与直线滑轨10 的相对位置;方便圆锥孔柱7处于舒适的测量位置;
[0041]
步骤5、采集数据,并记录数据:关节臂式坐标测量机11无内置电机,需手扶关节臂式坐标测量机11;将关节臂式坐标测量机11的末端测量装置紧贴圆锥孔柱7 内壁,摆动一次关节臂即可改变关节1到关节6的角度,多次摆动关节臂式坐标测量机11,在固定好的空间辅助运动机构的圆锥孔柱7上进行多姿态采点,每按一次关节臂式坐标测量机11的数据
采集键,就会记录一组数据(θ1,θ2,θ3,θ4,θ5,θ6)和x,y, z,按下数据采集键所得的数据会通过关节臂式坐标测量机数据传输线13传送到计算机12存储;比如第一次按关节臂式坐标测量机11的数据采集键,就会得一组数据(θ
1,1
,θ
2,1
,θ
3,1
,θ
4,1
,θ
5,1
,θ
6,1
)和(x1,y1,z1),第二次按关节臂式坐标测量机11的数据采集键,就会得第二组数据(θ
1,2
,θ
2,2
,θ
3,2
,θ
4,2
,θ
5,2
,θ
6,2
)和(x2,y2,z2),以此类推;
[0042]
步骤6、充分采集数据点,获得数据组:执行步骤5之后,可获得一组关节臂式坐标测量机11的关节角度和关节臂式坐标测量机11的末端位置坐标(即圆锥孔柱7 在空间位置的数据组),然后再次执行步骤4,改变圆锥孔柱7在空间中的位置,再执行步骤5,获得另一组关节臂式坐标测量机11的关节角度和关节臂式坐标测量机 11的末端位置坐标,重复步骤4、5,即可充分获得能够代表关节臂式坐标测量机11 的关节角度(θ
1,i
,θ
2,i
,θ
3,i
,θ
4,i
,θ
5,i
,θ
6,i
)和末端位置坐标x
i
,y
i
,z
i
的数据值;其中,i=1,2,
…
,n 表示第i组记录数据;
[0043]
在本申请结构的基础上,将光栅尺数据传输线14一端与计算机12连接,另一端与光栅尺6连接,通过改变圆锥孔柱7在光栅尺6上的距离位置,光栅尺数据传输线14将圆锥孔柱7移动的距离传送到计算机12中,实现了不仅可以采集坐标位置点,还可以采集距离信息,满足了单点、距离等不同的标定方式,提高了本申请机械结构与不同方法结合的兼容性。
[0044]
步骤7、考虑采集数据过程中可能出现噪声获得调动,对x
i
,y
i
,z
i
进行数据平滑处理,得到(x
′
i
,y
′
i
,z
′
i
),对于采集的某一组坐标值(x
i
,y
i
,z
i
)不予直接采用,利用前一次采集的数据(x
i-1
,y
i-1
,z
i-1
)和后一次采集的数据(x
i+1
,y
i+1
,z
i+1
)根据公式1,求解新的坐标值(x
′
i
,y
′
i
,z
′
i
)以代替原来的坐标值(x
i
,y
i
,z
i
),处理公式如下:
[0045]
如果i=1或i=n,则(x
′1,y
′1,z
′1)=(x1,y1,z1)或者(x
′
n
,y
′
n
,z
′
n
)=(x
n
,y
n
,z
n
);
[0046]
如果1<i<n,则:
[0047][0048][0049][0050]
式中,(x
′
i
,y
′
i
,z
′
i
)为平滑处理后的数据,(x
i-1
,y
i-1
,z
i-1
)和(x
i+1
,y
i+1
,z
i+1
)分别为平滑处理前(x
i
,y
i
,z
i
)的前一组采集的数据和后一组采集的数据;(x
′1,y
′1,z
′1)=(x1,y1,z1)为平滑处理的第一组数据,(x1,y1,z1)为第一组采集的数据,此数据未经过平滑处理;(x
′
n
,y
′
n
,z
′
n
)=(x
n
,y
n
,z
n
)为平滑处理的最后一组数据,(x
n
,y
n
,z
n
)为最后一组采集的数据,此数据未经过平滑处理;
[0051]
步骤8、训练rbf神经网络:确定网络的输入为关节臂式坐标测量机11的六个关节转角(θ
1,i
,θ
2,i
,θ
3,i
,θ
4,i
,θ
5,i
,θ
6,i
),输出为柱面坐标系下的单点偏差δs
i
,δh
i
,δz
i
,将采集到的经过步骤7处理的数据总数的80%用来训练rbf神经网络,单点偏差由下式计算得到:
[0052]
[0053][0054][0055]
δz
i
=z
′
i-z
a
[0056]
式中,x
a
,y
a
,z
a
分别为经历过平滑处理的所有末端坐标值(x
′
i
,y
′
i
,z
′
i
)的平均值,δs
i
、δh
i
和δz
i
为第i组关节臂式坐标测量机11末端的切向偏移量、径向偏移量和圆柱坐标系下的基座z轴方向的偏移量;β
i
为平均值(x
a
,y
a
)与经历过平滑处理的第i组末端坐标值(x
′
i
,y
′
i
)之间的角度偏差值;
[0057]
步骤9、选取样本数据验证神经网络:将步骤7采集到的数据总数剩余的20%作为验证数据,输入数据点剩余20%的关节转角(θ
1,i
,θ
2,i
,θ
3,i
,θ
4,i
,θ
5,i
,θ
6,i
),利用经过训练的rbf神经网络预测出输出参数δs
i
,δh
i
,δz
i
,并根据如下公式计算δx
i-cv
,δy
i-cv
,δz
i-cv
:
[0058][0059]
δx
i-cv
=abs(δh
i
)cosφ
i
±
abs(δs
i
)sinφ
i
[0060][0061]
δz
i-cv
=z
′
i-δz
i
[0062]
式中,δx
i-cv
、δy
i-cv
、δz
i-cv
分别为笛卡尔坐标系下(x
i
,y
i
,z
i
)的误差补偿值;φ
i
第i组坐标值在末端切向方向的角度偏差值;
[0063]
步骤10、误差补偿:提高关节臂式坐标测量机11的精度,将计算出来的误差补偿值补偿到关节臂式坐标测量机11的末端坐标中,根据柱坐标系的特性,若δs
i
≥0、δh
i
≥0或δs
i
<0,δh
i
<0,则δx
i-cv
取正号;若δs
i
<0、δh
i
≥0或δs
i
≥0、δh
i
<0,则δx
i-cv
取负号,即补偿公式为:
[0064][0065]
y
i-new
=y
i-δy
i-cv
[0066]
z
i-new
=z
i-δz
i-cv
[0067]
式中,x
i-new,yi-new,zi-new
分别为补偿后新的坐标值,(x
i
,y
i
,z
i
)为原始采集的坐标值,即未经过平滑处理的坐标值。
[0068]
将本实用新型的平台采用本申请公开的方法进行处理,证明本实用新型提供的平台配合本申请公开的方法不仅能够有效地提高单点重复精度,而且相对于传统的最小二乘法,本申请方法所得出的单点重复精度更趋于稳定,即每次测量的结果都能稳定在很小的范围内,这样的结果有利于避免出现数据上的跳动。
[0069]
表1两种方法误差补偿后分析表
[0070][0071]
上面结合附图对本实用新型的具体实施方式作了详细说明,但是本实用新型并不限于上述实施方式,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本实用新型宗旨的前提下作出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1