一种针对敏感饰面板材的磁吸式抓取机构的制作方法
[0001]
本实用新型涉及家具制造的技术领域,尤其是涉及一种针对敏感饰面板材的磁吸式抓取机构。
背景技术:
[0002]
目前家具行业电子锯上料方式以人工搬运为唯一下料方式,该方式有以下缺点:
[0003]
工人搬运每次搬运量较少工作效率低下,搬运次数极多,搬运时极易产生安全隐患。此外,由于木金复合板材的质量较重,单块板件质量较重,一方面是工人搬运不方便,另一方面就是若采用夹爪气缸,则需用较大的抓取力才能夹住板材,这样则会对板材造成损伤。
技术实现要素:
[0004]
针对现有技术存在的不足,本实用新型的目的是提供一种针对敏感饰面板材的磁吸式抓取机构,其具有工作效率,可减少对板件损伤的效果。
[0005]
本实用新型的上述发明目的是通过以下技术方案得以实现的:
[0006]
一种针对敏感饰面板材的磁吸式抓取机构,包括底座,所述底座上设有第一电动转盘,所述第一电动转盘上设有竖直设置的立柱,所述立柱上设有与其转动连接的机械臂,所述立柱与机械臂之间设有驱动气缸,所述驱动气缸的活塞杆顶端与机械臂铰接,所述驱动气缸的缸体底端与立柱铰接,所述机械臂背向立柱一端设有电磁吸盘。
[0007]
通过采用上述技术方案,驱动气缸伸长其活塞杆,机械臂受其驱动向下摆动,电磁吸盘吸住木金复合板材,驱动气缸收缩其活塞杆向上摆动,再由第一电动转盘驱动机械臂转动将木金复合板材放置于指定位置。采用这种磁吸式抓取机构,可方便抓取质量较大的木金复合板材,而且可根据需要抓取的数量,调节电磁吸盘的磁力,提高了工作效率,而且还不会对木金复合板材表面的花纹造成损伤。
[0008]
本实用新型在一较佳示例中可以进一步配置为:所述机械臂包括水平设置的横臂和l形臂,所述电磁吸盘设置在l形臂背向横臂一端,所述l形臂与横臂之间设有第二电动转盘。
[0009]
通过采用上述技术方案,第二电动转盘驱动l形臂转动,避免整个机械臂摆动的区域较大,与周围其他部件相互干涉。
[0010]
本实用新型在一较佳示例中可以进一步配置为:抓取机构还包括滑轨,所述底座与滑轨滑动连接。
[0011]
通过采用上述技术方案,通过设置滑轨和底座,这样抓取机构可运动范围更大。
[0012]
本实用新型在一较佳示例中可以进一步配置为:所述底座两侧设有倾斜设置制动气缸,所述制动气缸沿朝向滑轨方向向下倾斜设置,所述制动气缸的活塞杆顶端设有制动刹片。
[0013]
通过采用上述技术方案,制动刹片将底座与滑轨的相对位置固定,避免抓取机构
晃动,不稳定。
[0014]
本实用新型在一较佳示例中可以进一步配置为:所述底座两侧均设有限位导轮,所述限位导轮贴合滑轨侧壁。
[0015]
通过采用上述技术方案,当底座以及其上的抓取机构在滑轨上滑动时,限位导轮对其限位,这样抓取也更加精准。
[0016]
综上所述,本实用新型包括以下至少一种有益技术效果:
[0017]
1.采用这种磁吸式抓取机构,可方便抓取质量较大的木金复合板材,而且可根据需要抓取的数量,调节电磁吸盘的磁力,提高了工作效率,而且还不会对木金复合板材表面的花纹造成损伤;
[0018]
2.通过设置滑轨和底座,这样抓取机构可运动范围更大;
[0019]
3.当底座以及其上的抓取机构在滑轨上滑动时,限位导轮对其限位,这样抓取也更加精准。
附图说明
[0020]
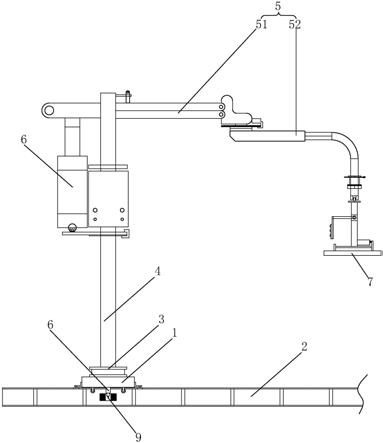
图1是实施例的整体结构示意图;
[0021]
图2是实施例中底座与滑轨之间位置关系示意图。
[0022]
图中,1、底座;11、限位导轮;2、滑轨;3、第一电动转盘;4、立柱;5、机械臂;51、横臂;52、l形臂;53、第二电动转盘;6、驱动气缸;7、电磁吸盘;8、制动气缸;9、制动刹片。
具体实施方式
[0023]
以下结合附图对本实用新型作进一步详细说明。
[0024]
实施例:
[0025]
参照图1和2,为本实用新型公开的一种针对敏感饰面板材的磁吸式抓取机构,包括底座1、滑轨2、第一电动转盘3、立柱4、机械臂5、驱动气缸6和电磁吸盘7。
[0026]
底座1两侧设有倾斜设置制动气缸8,制动气缸8沿朝向滑轨2方向向下倾斜设置,制动气缸8的活塞杆顶端设有制动刹片9。当需要固定底座1的位置时,制动气缸8伸长其活塞杆,活塞杆上的制动刹片9与滑轨2侧壁抵触,制动刹片9采用高摩擦系数的橡胶材料,制动刹片9将底座1与滑轨2的相对位置固定,避免抓取机构晃动,不稳定。
[0027]
底座1两侧均设有限位导轮11,限位导轮11贴合滑轨2侧壁,当底座1以及其上的抓取机构在滑轨2上滑动时,限位导轮11对其限位,这样抓取也更加精准。
[0028]
第一电动转盘3设置在底座1上,立柱4竖直设置在电动转盘上,电动转盘转动驱动立柱4转动,机械臂5与立柱4转动连接,机械臂5在立柱4上,沿竖直方向上下摆动。
[0029]
立柱4与机械臂5之间设有驱动气缸6,驱动气缸6的活塞杆顶端与机械臂5铰接,驱动气缸6的缸体底端与立柱4铰接,机械臂5背向立柱4一端设有电磁吸盘7。
[0030]
驱动气缸6伸长其活塞杆,机械臂5受其驱动向下摆动,电磁吸盘7吸住木金复合板材,驱动气缸6收缩其活塞杆向上摆动,再由第一电动转盘3驱动机械臂5转动将木金复合板材放置于指定位置。采用这种磁吸式抓取机构,可方便抓取质量较大的木金复合板材,而且可根据需要抓取的数量,调节电磁吸盘7的磁力,提高了工作效率,而且还不会对木金复合板材表面的花纹造成损伤。
[0031]
机械臂5包括水平设置的横臂51和l形臂52,电磁吸盘7设置在l形臂52背向横臂51一端,l形臂52与横臂51之间设有第二电动转盘53。
[0032]
第二电动转盘53驱动l形臂52转动,避免整个机械臂5摆动的区域较大,与周围其他部件相互干涉。
[0033]
本具体实施方式的实施例均为本实用新型的较佳实施例,并非依此限制本实用新型的保护范围,故:凡依本实用新型的结构、形状、原理所做的等效变化,均应涵盖于本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1