一种雨刷器胶条裁切装置的制作方法
[0001]
本实用新型涉及切割装置,具体涉及一种雨刷器胶条裁切装置。
背景技术:
[0002]
当前汽车上使用的雨刷器一般为电动雨刷器,电动雨刷器是用电机驱动的,一般由刮水刷臂、刮水刷片总成、胶条、刷片支座、刷片支持器、刮水刷臂心轴、雨刷器底板、电动机、减速机构、驱动杆系、驱动杆较链、雨刷器开关以及雨刷器开关旋钮等组成。胶条是雨刷器的重要组成部分,胶条质量的好与差直接影响着刮水的效果。通常ffi刷器胶条由橡胶材料制成,橡胶的特性是既有弹性,又有定的韧性。
[0003]
现有的胶条切割机切割成本大、效率低以及无法对切割长度进行调整,因此亟需研发一种成本低、效率高且可对切割长度进行调整的胶条裁切装置。
技术实现要素:
[0004]
本实用新型提供了一种雨刷器胶条裁切装置,其目的在于提供一种切割成本低、效率高且可对切割长度进行调整的雨刷器胶条裁切装置。
[0005]
为了解决上述技术问题,本实用新型的技术方案如下:
[0006]
一种雨刷器胶条裁切装置,包括机架,所述机架设有裁切组件和裁切台,所述裁切台可移动地设于机架,所述裁切台设有两个工作台面,两个所述工作台面均设有可移动地推动组件,所述裁切组件设于两个工作台面之间。
[0007]
进一步的,所述裁切组件包括气缸和设于气缸的安装板,所述安装板设有两个压紧块,两个所述压紧块之间设有两个刀具。
[0008]
进一步的,所述工作台面设有双数个凹槽。
[0009]
进一步的,所述推动组件包括伺服电机、螺杆和推动板,所述螺杆设有螺杆座,所述螺杆通过皮带传动机构与伺服电机连接,所述推动板设有双数个凸起,所述凸起嵌入凹槽,所述裁切台设有滑轨和滑块,所述滑块与螺杆座连接,所述工作台面设有通槽,所述推动板通过一连接板与螺杆座连接。
[0010]
进一步的,还包括一机器人和输送带,所述机器人设有一夹具,所述机器人设于机架和输送带之间。
[0011]
进一步的,所述夹具包括一夹板,所述夹板设有双数个与所述凹槽一致的仿形槽,所述仿形槽内设有吸盘。
[0012]
进一步的,机器人是四轴机器人或六轴机器人。
[0013]
进一步的,所述裁切台设有缓冲垫。
[0014]
由上述对本实用新型的描述可知,和现有技术相比,本实用新型的优点在于:裁切胶条时,将胶条放置于工作台面后,裁切台移动至裁切组件,裁切组件将胶条切割,一分为二,提高裁切效率,由机台代替人工切割也可降低成本;胶条切割后,推动组件推动胶条移动,裁切组件再对其进行切割,可调整胶条的切割长度。
附图说明
[0015]
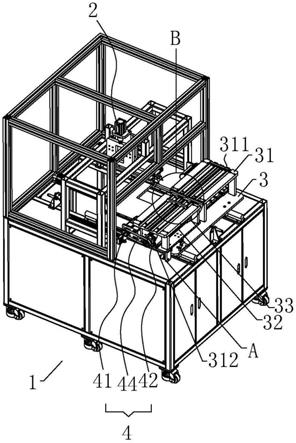
图1为本实用新型的结构示意图。
[0016]
图2为本实用新型裁切组件的结构示意图。
[0017]
图3为本实用新型设有机器人和输送带的结构示意图。
[0018]
图4为本实用新型夹具的结构示意图。
[0019]
图5为本实用新型图1中b处工作台面的放大图。
具体实施方式
[0020]
参照图1和图2,一种雨刷器胶条裁切装置,包括机架1,机架1设有裁切组件2和裁切台3,裁切台3可移动地设于机架1,裁切台3设有缓冲垫a, 缓冲垫a的设置可以提高本实用新型的使用寿命,裁切台3可移动的结构可以采用滑轨或气缸等结构,在这就不加赘述。裁切台3设有两个工作台面31,两个工作台面31均设有可移动地推动组件4,裁切组件2设于两个工作台面 31之间。
[0021]
使用原理:
[0022]
将胶条放置于工作台面31,裁切台3移动至裁切组件2,裁切组件2将胶条切割一分为二;胶条切割后,推动组件4推动胶条移动,调整好胶条切割长度后,裁切组件2再对其进行切割。
[0023]
参照图1和图2,本技术方案的裁切组件2包括气缸21和设于气缸21 的安装板22,安装板22设有两个压紧块23,两个压紧块23之间设有两个刀具24。采用该技术方案:其一,切割时压紧块23将胶条压紧于工作台面31,提高切割的稳定性;其二,采用两个刀具24,在调整胶条切割长度时(即二次切割)可以同时对两根胶条进行切割,提高工作效率。
[0024]
参照图1,本技术方案的工作台面31设有双数个凹槽311。采用该技术方案,压紧块23压紧于工作台面31表面也就是压紧于胶条的上表面,可以防止胶条变形。
[0025]
参照图1和图5,本技术方案的推动组件4包括伺服电机41、螺杆42和推动板43,螺杆42设有螺杆座(图中未示出),螺杆42通过皮带传动机构 44与伺服电机41连接,推动板43设有双数个凸起431,凸起431嵌入凹槽 311,裁切台3设有滑轨32和滑块33,滑块33与螺杆座(图中未示出)连接,工作台面31设有通槽312,推动板43通过一连接板45与螺杆座(图中未示出)连接。采用该技术方案的推动组件4,在调整胶条切割长度时,是由推动板43的凸起431带动胶条移动,而凸起431和胶条均在凹槽311内,所以可以防止胶条发生偏离,提高切割精确度。
[0026]
参照图1、图3和图4,本技术方案还包括一机器人5和输送带6,机器人5设有一夹具7,机器人5设于机架1和输送带6之间,机器人可以采用四轴机器人或六轴机器人。当胶条切割完成后,机器人5带动夹具7将工作台面31上的胶条夹取,放置输送带6送到下一步加工工序,提高工作效率。该技术方案的夹具7包括一夹板71,夹板71设有双数个与凹槽311一致的 711仿形槽,仿形槽711内设有吸盘712。采用该结构的夹具7可以将工作台面31的胶条一次性夹取,进一步提高工作效率。
[0027]
上述仅为本实用新型的具体实施方式,但本实用新型的设计构思并不局限于此,凡利用此构思对本实用新型进行非实质性的改动,均应属于侵犯本实用新型保护范围的行为。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1