[0001]
本实用新型涉及机械臂技术,特别是涉及一种滑环式机械臂关节的技术。
背景技术:[0002]
机械臂关节的输入需要有电源和信号线的导入,输出需要有电源和信号线的导出。如图3所示,现有机械臂关节内部的输入侧、输出侧之间的电气接头203、204都是采用线束205连接的,当输出轴202相对输入轴201产生一定角度的旋转后,输入侧、输出侧的电气接头203、204也会相对扭转同样的角度,从而使得电气接头之间的连接线束205也产生扭转,线束扭转角度过大及扭转次数过多以后,线束内部的导电丝容易发生断裂,从而导致机械臂出现故障,因此现有机械臂关节的输出轴、输入轴之间的扭转角度具有一定的限制。
技术实现要素:[0003]
针对上述现有技术中存在的缺陷,本实用新型所要解决的技术问题是提供一种输出轴、输入轴之间的扭转角度没有限制的滑环式机械臂关节。
[0004]
为了解决上述技术问题,本实用新型所提供的一种滑环式机械臂关节,包括关节输入轴、关节输出轴、输入侧线束、输出侧线束,所述关节输入轴、关节输出轴同轴连接,并且关节输入轴、关节输出轴能相互转动,关节输入轴及关节输出轴的轴心部位开设有相互连通的轴孔,其特征在于:所述关节输入轴及关节输出轴上的轴孔组合成一个线束穿孔,线束穿孔内设有滑环接线座,所述输入侧线束、输出侧线束分别穿入线束穿孔中;
[0005]
所述滑环接线座由滑环外壳、滑环内芯组成,滑环外壳为绝缘壳体,滑环内芯均为绝缘柱体,滑环内芯安装在滑环外壳内,并且滑环内芯能相对滑环外壳转动,滑环内芯上固定有多个导电环,并且各个导电环沿滑环内芯的轴向间隔布设;
[0006]
所述滑环外壳上固定有多个导电刷片,各个导电刷片与各个导电环一一对应,每个导电刷片都以活动配合方式抵住对应导电环的外环面,使得每个导电刷片都与其对应的导电环形成电气接触;
[0007]
所述输入侧线束中的各根导线以电气接触方式分别接到各个导电环上,输出侧线束中的各根导线以电气接触方式分别接到各个导电刷片上。
[0008]
本实用新型提供的滑环式机械臂关节,利用滑环外壳上的导电刷片与滑环内芯上的导电环的配合实现输入侧线束与输出侧线带的电信号传递,由于滑环外壳与滑环内芯为转动配合,关节输出轴相对关节输入轴转动时,输入侧线束、输出侧线束不会产生扭转,滑环外壳与滑环内芯之间的相对转动没有角度限制,因此机械臂关节的关节输出轴、关节输入轴之间的扭转角度也不会受到限制。
附图说明
[0009]
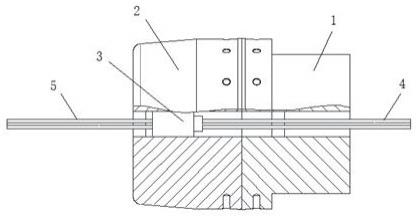
图1是本实用新型实施例的滑环式机械臂关节局部剖切后的示意图;
[0010]
图2是本实用新型实施例的滑环式机械臂关节中的滑环接线座将滑环外壳剖开后
的示意图;
[0011]
图3是现有机械臂关节局部剖切后的示意图。
具体实施方式
[0012]
以下结合附图说明对本实用新型的实施例作进一步详细描述,但本实施例并不用于限制本实用新型,凡是采用本实用新型的相似结构及其相似变化,均应列入本实用新型的保护范围,本实用新型中的顿号均表示和的关系。
[0013]
如图1-图2所示,本实用新型实施例所提供的一种滑环式机械臂关节,包括关节输入轴1、关节输出轴2、输入侧线束4、输出侧线束5,所述关节输入轴1、关节输出轴2同轴连接,并且关节输入轴、关节输出轴能相互转动,关节输入轴及关节输出轴的轴心部位开设有相互连通的轴孔,其特征在于:所述关节输入轴1及关节输出轴2上的轴孔组合成一个线束穿孔,所述线束穿孔内设有滑环接线座3,所述输入侧线束4、输出侧线束5分别穿入线束穿孔中;
[0014]
所述滑环接线座3由滑环外壳31、滑环内芯32组成,滑环外壳31为绝缘壳体,滑环内芯32均为绝缘柱体,滑环内芯32安装在滑环外壳31内,并且滑环内芯能相对滑环外壳转动,滑环内芯32上固定有多个导电环33,并且各个导电环33沿滑环内芯的轴向间隔布设;
[0015]
所述滑环外壳31上固定有多个导电刷片34,各个导电刷片34与各个导电环33一一对应,每个导电刷片34都以活动配合方式抵住对应导电环33的外环面,使得每个导电刷片34都与其对应的导电环33形成电气接触;
[0016]
所述输入侧线束4中的各根导线以电气接触方式分别接到各个导电环33上,输出侧线束5中的各根导线以电气接触方式分别接到各个导电刷片34上。
[0017]
本实用新型实施例中,当关节输出轴2相对关节输入轴1扭转时,滑环外壳31与滑环内芯32也会产生相对的扭转,使得输入侧线束4、输出侧线束5不会产生扭转,而且由于导电刷片34以活动配合方式抵住导电环33,因此也不会影响电信号的传输。