一种机器人自动搬运电机控制器壳体的机构的制作方法
1.本实用新型涉及自动化生产线技术领域,具体涉及一种自动搬运电机控制器壳体的机构。
背景技术:
2.目前工厂的自动化程度要求越来越高,机器人的使用相应的也越来越普及。目前市场的机器人采用精准的坐标来控制机器人的移动,但是现实中,生产工件的定位没有那么精准,流水线的定位,或者使用agv运输,重复的定位精度也不高,使得工件在特殊情况偏离了原始位置,如果这时候机器人按照原来设定好的轨迹来运行,就会碰坏夹具和工件,造成重大损失。
3.目前在新能源领域,常使用机器人来搬运产品和装配产品。但是如果在产品定位出现偏差后,机器人按照原有轨迹行走,就会产品模组和夹具,并且可能使产品因为碰撞,造成更严重的后果。
技术实现要素:
4.为解决上述问题,提出了以下技术方案:
5.一种机器人自动搬运电机控制器壳体的机构,其特征在于:包括连接法兰、相机夹具、快换盘、控制器壳体夹具和控制器壳体,机器人卡盘、连接法兰和快换盘和控制器壳体夹具依次连接;
6.控制器壳体夹具包括浮动机构、钩爪机构和连接块,钩爪机构滑动连接于连接块底部,连接块用于夹持固定控制器壳体,连接块设置有定位孔,浮动机构通过定位孔连接于连接块,控制器壳体设置有卡口,通过浮动机构对卡口施加压力,使得控制器壳体紧密贴合于所述钩爪机构。
7.进一步,连接法兰一端与机器人卡盘固定连接,另一端与快换盘固定连接,快换盘一端与连接法兰固定连接,另一端与控制器壳体夹具呈空间90
°
夹角固定连接,相机夹具位于连接法兰侧面,拍照面垂直控制器壳体夹具面。
8.进一步,连接块上呈矩形设置有四个定位孔,连接块底部通过定位孔垂直固定有浮动机构,连接块底部还设置有钩爪机构,钩爪机构包括两个相对设置的钩爪,钩爪的两侧分别设置有一个浮动机构,连接块远离连接块一端设置有 u型开口,定位孔设置于u型开口的四个角,两个钩爪分别设置于u型开口中垂直开口的两边。
9.进一步,浮动机构包括定位块、压杆和弹簧,定位块设置有插销槽,插销槽中设置有弹簧,压杆插接于插销槽。
10.进一步,钩爪采用线轨结构滑动连接于连接块底部。
11.本实用新型有益效果如下:
12.当钩爪机构完成对控制器壳体的抓取后,通过浮动机构能够使得控制器壳体紧密的贴合在钩爪机构上,由于浮动机构内部采用弹簧的结构,通过弹簧将压杆推出,在针对形
状不规则的控制器壳体时,弹簧能够根据控制器壳体的形状完成形变,使得浮动机构一样能够对控制器壳体提供良好的固定性;通过相机夹具上设置的相机能够便于操作员在操作机器人时能够精准定位;连接块上设置的能够便于观察控制器壳体在钩爪机构上的位置。
附图说明
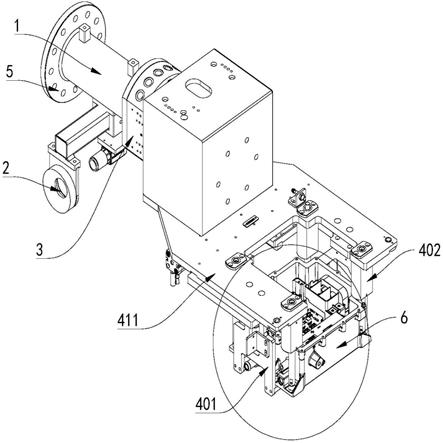
13.图1为本实用新型结构示意图;
14.图2为本实用新型工作时结构示意图;
15.图3为图2中a部放大图;
16.图4为定位块内部结构示意图,
17.附图标记说明如下:1.连接法兰、2.相机夹具、3.快换盘、401.钩爪机构、402.浮动机构、411.连接块、421.定位块、422.压杆、423.弹簧、5.机器人卡盘、6.控制器壳体、601.卡口。
具体实施方式
18.在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相正对地重要性。
19.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
20.下面结合说明书附图对本实用新型做进一步说明:
21.一种机器人自动搬运电机控制器壳体的机构,包括连接法兰1、相机夹具 2、快换盘3、控制器壳体夹具和控制器壳体6,机器人卡盘5、连接法兰1和快换盘3和控制器壳体夹具依次连接;
22.控制器壳体夹具包括浮动机构402、钩爪机构401和连接块411,钩爪机构401滑动连接于连接块411底部,连接块411用于夹持固定控制器壳体6,连接块411设置有定位孔,浮动机构402通过定位孔连接于连接块411,控制器壳体6设置有卡口,通过浮动机构402对卡口施加压力,使得控制器壳体6 紧密贴合于所述钩爪机构401,连接法兰1一端与机器人卡盘5固定连接,另一端与快换盘3固定连接,快换盘3一端与连接法兰1固定连接,另一端与控制器壳体夹具呈空间90
°
夹角固定连接,相机夹具2位于连接法兰1侧面,拍照面垂直控制器壳体夹具面,连接块411上呈矩形设置有四个定位孔,连接块411底部通过定位孔垂直固定有浮动机构402,连接块411底部还设置有钩爪机构401,钩爪机构401包括两个相对设置的钩爪,钩爪的两侧分别设置有一个浮动机构402,连接块411远离连接块411一端设置有u型开口,定位孔设置于u型开口的四个角,两个钩爪分别设置于u型开口中垂直开口的两边,浮动机构402包括定位块421、压杆422和弹簧423,定位块421设置有插销槽,插销槽中设置有
弹簧423,压杆422插接于插销槽,钩爪采用线轨结构滑动连接于连接块411底部。
23.当钩爪机构401完成对控制器壳体6的抓取后,通过浮动机构402能够使得控制器壳体6紧密的贴合在钩爪机构401上,由于浮动机构402内部采用弹簧423的结构,通过弹簧423将压杆422推出,在针对形状不规则的控制器壳体6时,弹簧423能够根据控制器壳体6的形状完成形变,使得浮动机构402 一样能够对控制器壳体6提供良好的固定性;通过相机夹具2上设置的相机能够便于操作员在操作机器人时能够精准定位;连接块411上设置的能够便于观察控制器壳体6在钩爪机构401上的位置。
24.本实用新型工作原理如下:
25.通过机器人卡盘5将本实用新型安装在机器人上,在对控制器壳体6进行夹取时通过相机夹具2上的相机观察控制器壳体6的位置,完成抓取后,在浮动机构402中,通过弹簧423将压杆422推出,在针对形状不规则的控制器壳体6 时,弹簧423能够根据控制器壳体6的形状完成形变,实现讲控制器壳体6 的固定在钩爪机构401上。
26.以上显示和描述了本实用新型的基本原理、主要特征和优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1