一种用于巡检机器人的无滑环小型双视二自由度云台的制作方法
[0001]
本实用新型涉及巡检机器人技术领域,具体而言,涉及一种用于巡检机器人的无滑环小型双视二自由度云台。
背景技术:
[0002]
传统的双视二自由度云台由于搭载设备多,走线复杂,为了增大旋转和俯仰的角度,某些云台使用了电滑环,这使云台本身的结构复杂度增加,云台的重量因此上升,且成本增加,使得一般的二自由度双视云台不能安装在超小型的巡检机器人平台上,这使电力隧道及综合管廊内的智能巡检设备的设计和布局会造成很大的困难,而使用单目摄像头,或一般的非电滑环式云台,又会出现功能不满足需求,云台角度过小等问题,且电滑环的长期使用所造成的磨损形成的信号传输错误率增高也无法很好地解决。
技术实现要素:
[0003]
本实用新型的目的在于提供一种用于巡检机器人的无滑环小型双视二自由度云台,其针对云台在双视的条件下,使用电滑环但来的尺寸重量增加,不使用电滑环造成的运动角度受限的问题,采用一种盘式电机加单悬臂驱动加空心走线轴的设计,从而减小尺寸和重量,在不使用电滑环的情况下实现
±
360
°
水平旋转角度,
±
90
°
俯仰角度。
[0004]
本实用新型的实施例是这样实现的:
[0005]
一种用于巡检机器人的无滑环小型双视二自由度云台,其包括云台主外壳和设置在云台主外壳内的:基座、电机、旋转基座、嵌入式控制板、定子安装架、输出轴架、输出轴、从动空心轴,以及从动架和主动架,基座位于云台主外壳内的底部,电机包括水平盘式电机和竖直盘式电机,水平盘式电机,安装在基座上,旋转基座连接在水平盘式电机顶部,嵌入式控制板固定在旋转基座顶部,旋转基座随水平盘式电机相对于基座可在水平方向上转动,从而实现
±
360
°
水平旋转角度,定子安装架和输出轴架分别固定在旋转基座上,竖直盘式电机置于定子安装架和输出轴架之间,输出轴和从动空心轴分别连接在竖直盘式电机的两侧,输出轴连接在输出轴架上,从动空心轴连接定子安装架上,输出轴的一端连接至主动架,从动空心轴的一端连接至从动架,输出轴和从动空心轴随竖直盘式电机相对于基座可在竖直平面上转动,从而实现
±
90
°
俯仰角度。
[0006]
在本实用新型较佳的实施例中,上述无滑环小型双视二自由度云台还包括摄像机外壳和连接架,连接架的两端分别连接主动架和从动架,摄像机外壳设置有两个且分别连接主动架和从动架。
[0007]
在本实用新型较佳的实施例中,上述连接架的两端分别呈l型的弯曲状,使得连接架的两端分别连接主动架和从动架时,连接架在云台主外壳的外侧相对于云台主外壳可转动。
[0008]
在本实用新型较佳的实施例中,上述竖直盘式电机电连接至嵌入式控制板内,从动空心轴的一端预留有走线孔,从动空心轴的内部走线并经从动架进入至连接架内。
[0009]
在本实用新型较佳的实施例中,上述用于巡检机器人的无滑环小型双视二自由度云台还包括从动轴轴承和输出轴轴承,从动轴轴承设置在从动空心轴并安装在从动架,输出轴轴承设置在输出轴并安装在输出轴架,输出轴和从动空心轴通过输出轴轴承和从动轴轴承相对于云台主外壳可转动。
[0010]
在本实用新型较佳的实施例中,上述定子安装架设置有供从动空心轴穿过的轴孔,从动空心轴穿过该轴孔与定子安装架相匹配,输出轴架设置有供输出轴穿过的轴孔,输出轴穿过该轴孔与输出轴架相匹配。
[0011]
在本实用新型较佳的实施例中,上述用于巡检机器人的无滑环小型双视二自由度云台还包括云台主外壳侧卡和摄像机检修盖,云台主外壳侧卡固定在云台主外壳的两侧,摄像机检修盖将摄像机外壳的开口处封住固定。
[0012]
在本实用新型较佳的实施例中,上述云台主外壳包括对称的两部分,云台主外壳包括对称的两部分和主外壳卡,主外壳卡固定在基座的底部,两部分的云台主外壳的底端与主外壳卡连接,云台主外壳的两部分对接连接后将水平盘式电机、竖直盘式电机和基座封装在内。
[0013]
本实用新型的有益效果是:
[0014]
本实用新型通过水平盘式电机在水平面上转动而带动连接在其以上的旋转基座转动,通过竖直盘式电机在竖直平面上转动而带动输出轴和从动空心轴转动,通过输出轴而带动摄像机外壳和连接架转动,在不使用电滑环的情况下实现
±
360
°
水平旋转角度,
±
90
°
俯仰角度,通过嵌入式控制板实现内部走线;该结构由于各相对运动部件内部走线,线缆不会产生过大相对运动,增加了云台运动的范围,同时不使用电滑环有效的减小了云台的体积和重量,降低了成本,使超小型双目视觉巡检机器人的设计成为可能。
附图说明
[0015]
为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本实用新型的某些实施例,因此不应被看作是对范围的限定。
[0016]
图1是本实用新型的总装配立体图;
[0017]
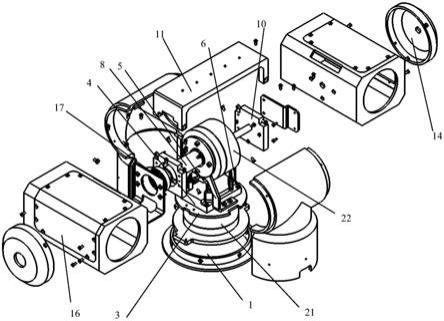
图2是本实用新型的总装爆炸图;
[0018]
图3是本实用新型去除外壳后的内部结构图;
[0019]
图4是本实用新型对从动空心轴进行剖切的局部视图;
[0020]
图标-基座;2-盘式电机;3-旋转基座;4-嵌入式控制板;5-定子安装架;6-输出轴架;7-输出轴;8-从动空心轴;9-从动架;10-主动架;11-连接架;12-云台主外壳;13-主外壳卡;14-云台主外壳侧卡;15-摄像机外壳;16-摄像机检修盖;17-从动轴轴承;18-输出轴轴承。
具体实施方式
[0021]
为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。通常在此处附图中描述和
表示出的本实用新型实施例的组件可以以各种不同的配置来布置和设计。
[0022]
因此,以下对在附图中提供的本实用新型的实施例的详细描述并非旨在限制要求保护的本实用新型的范围,而是仅仅表示本实用新型的选定实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
[0023]
第一实施例
[0024]
请参照图1,本实施例提供一种用于巡检机器人的无滑环小型双视二自由度云台,其包括基座1、盘式电机、旋转基座3、嵌入式控制板4、定子安装架5、输出轴7架6、输出轴7、从动空心轴8、从动架9、主动架10、连接架11、云台主外壳12、主外壳卡13、云台主外壳侧卡14、摄像机外壳15、摄像机检修盖16、从动轴轴承17、输出轴轴承18,其中盘式电机包括水平盘式电机21和竖直盘式电机22,该云台分别使用两台盘式电机作为云台的驱动电机,使用一个stm32f103嵌入式控制板4作为云台主控板,盘式电机与主控板通过can通信相连,并由主控板对电机和其他设备进行供电,使云台的内部各零部件之间的走向相对静止,或只旋转较小的角度,云台俯仰区域上的供电及通信线从固定的空心轴中穿过,空心轴一段安装从动部分,另一端安装在盘式电机定子上,盘式电机转子上安装驱动轴,驱动轴另一端安装主动部分,在使用连接架11将驱动部分和从动部分相连,从而实现俯仰动作。
[0025]
请参照图2、图3和图4,本实施例的云台,其中部分结构设置在云台主外壳12内,其包括:基座1、电机、旋转基座3、嵌入式控制板4、定子安装架5、输出轴7架6、输出轴7、从动空心轴8,另外一部分位于云台主外壳12外部,包括从动架9、主动架10、连接架11、云台主外壳12、主外壳卡13、云台主外壳侧卡14、摄像机外壳15和摄像机检修盖16,基座1位于云台主外壳12内的底部,基座1作为水平旋转的支撑平台,以下为云台的水平旋转部分,水平盘式电机21安装在基座1上,基座1的中部设置有供插入的插孔,水平盘式电机21的中部轴插入至插孔内固定连接,水平盘式电机21的转动圈置于基座1顶部并相对于基座1可转动,且水平盘式电机21的转动圈与旋转基座3固定连接,旋转基座3设置有固定孔,使用螺钉将旋转基座3固定在水平盘式电机21的转动圈的外壳处,旋转基座3随水平盘式电机21相对于基座1可在水平方向上转动,从而实现
±
360
°
水平旋转角度。旋转基座3的顶部与嵌入式控制板4固定,嵌入式控制板4内置走线,以对水平盘式电机21和竖直盘式电机22进行供电,同时提供用于通信的走线,水平盘式电机21和竖直盘式电机22分别电连接至嵌入式控制板4内,嵌入控制板的出线,经由从动空心轴8预留的走线孔对外连接,从动空心轴8的另一端也预留有走线孔,从动空心轴8的内部走线并经从动架9进入至连接架11内。定子安装架5和输出轴7架6分别固定在旋转基座3上,定子安装架5的底端和输出轴7架6的底端分别设置有螺纹孔,使用螺钉将定子安装架5和输出轴7架6固定在旋转基座3上,定子安装架5和输出轴7架6之间具有间隔,且竖直盘式电机22放置于该间隔内,输出轴7和从动空心轴8分别连接在竖直盘式电机22的两侧,输出轴7连接在输出轴7架6上,从动空心轴8连接定子安装架5上,定子安装架5的顶端设置呈圆盘状且中部具有轴孔,从动空心轴8穿过该轴孔与定子安装架5相匹配,定子安装架5的顶端盘状还设置有围绕在轴孔边缘的螺纹孔,输出轴7架6的顶端也设置呈圆盘状且中部具有轴孔,输出轴7穿过该轴孔与输出轴7架6相匹配,输出轴7架6还设置有围绕在轴孔边缘的螺纹孔,使用螺钉将竖直盘式电机22的外壳固定在定子安装架5和输出轴7架6之间,固定后连接竖直盘式电机22的输出轴7和从动空心轴8分别穿过定子安装
架5的轴孔和输出架的轴孔,输出轴7和从动空心轴8相对于定子安装架5和输出轴7架6可转动。
[0026]
输出轴7的一端连接至主动架10,从动空心轴8的一端连接至从动架9,输出轴7和从动空心轴8随竖直盘式电机22相对于基座1可在竖直平面上转动,从而实现
±
90
°
俯仰角度。主动架10和从动架9分别位于云台主外壳12的两侧,输出轴7架6的中部设置有轴承孔,从动架9的中部设置有轴承孔,输出轴7承置于主动架10的轴承孔内安装,从动轴承置于输出轴7架6的轴承孔内安装,从动轴轴承17设置在从动空心轴8的一端并置于从动架9的轴承孔,输出轴轴承18设置在输出轴7的中部置于输出轴7架6的轴承孔,输出轴7和从动空心轴8通过输出轴轴承18和从动轴轴承17相对于云台主外壳12可转动,这样,输出轴7和从动空心轴8相对于输出轴7架6和从动架9可转动,而输出轴7的一端与主动架10连接,这样,输出轴7转动而带动主动架10进行转动。云台主外壳12包括对称的两部分,两部分云台主外壳12设置有位置相对的螺纹孔并使用螺钉固定连接,即两部分的云台主外壳12对接,对接连接后,再将云台主外壳侧卡14封装在云台主外壳12的两侧固定,这样将竖直盘式电机22封装在云台主外壳12内,对接后的云台主外壳12和云台主外壳侧卡14位于主动架10和从动架9之间,其中云台主外壳侧卡14设置有两个,其中一个云台主外壳侧卡14的中部设置有供从动空心轴8穿过的轴孔,另一个云台主外壳侧卡14的中部设置有供输出轴7穿过的轴孔,两个云台主外壳侧卡14将部分输出轴7和部分从动空心轴8封装在内,云台主外壳侧卡14的外缘处呈环形且设置有螺钉孔,而云台主外壳12的两部分的边缘设置呈弧形且带有通孔,使用螺钉穿过该通孔和螺钉孔而将两个云台主外壳侧卡14分别固定在云台主外壳12的两侧。无滑环小型双视二自由度云台还包括摄像机外壳15和连接架11,连接架11的两端分别连接主动架10和从动架9,连接架11的两端分别呈l型的弯曲状,且连接架11的两端分别朝向主动架10和从动架9弯曲,连接架11的两端分别呈拱形且设置有螺纹孔,主动架10和从动架9的顶端分别设置为与连接架11的两端形状相匹配的形状,使用螺钉将连接架11的两端分别与主动架10和从动架9的顶端连接固定,使得连接架11的两端分别连接主动架10和从动架9时,连接架11在云台主外壳12的外侧相对于云台主外壳12可转动,本实施例还包括主外壳卡13、摄像机外壳15和摄像机检修盖16,主外壳卡13设置在基座底部,主外壳卡13的边缘处设置有螺钉孔,两部分的云台主外壳12的底部分别设置有位置相对的螺纹孔,两部分的云台主外壳12连接后,使用螺钉穿过该螺钉孔和螺纹孔而将云台主外壳12的底部固定在主外壳卡13,云台主外壳12的两部分对接连接后将水平盘式电机21、竖直盘式电机22和基座1封装在内,摄像机外壳15设置有两个分别连接主动架10和从动架9,其中摄像机外壳15的内侧分别设置有连接孔,主动架10和从动架9分别设置有螺纹孔,使用螺钉将主动架10与其中一个摄像机外壳15连接固定,使用螺钉将从动架9与另一摄像机外壳15连接固定,连接后,两个摄像机外壳15和连接架11一起随输出轴7转动而转动,从而实现竖直平面内的转动,摄像机外壳15呈方形且设置有连通相邻两个面的开口,摄像机检修盖16的形状与该开口处正好匹配,且摄像机检修盖16的两侧互相垂直,摄像机检修盖16将摄像机外壳15的开口处封住固定,该设置以便于之后对摄像机外壳15内部进行检修。
[0027]
综上所述,本实用新型实例通过水平盘式电机在水平面上转动而带动连接在其以上的旋转基座转动,通过竖直盘式电机在竖直平面上转动而带动输出轴和从动空心轴转动,通过输出轴而带动摄像机外壳和连接架转动,在不使用电滑环的情况下实现
±
360
°
水
平旋转角度,
±
90
°
俯仰角度,通过嵌入式控制板实现内部走线;该结构增加了云台运动的范围,同时不使用电滑环有效的减小了云台的体积和重量,降低了成本,使超小型双目视觉巡检机器人的设计成为可能。
[0028]
本说明书描述了本实用新型的实施例的示例,并不意味着这些实施例说明并描述了本实用新型的所有可能形式。本领域的普通技术人员将会意识到,这里所述的实施例是为了帮助读者理解本实用新型的原理,应被理解为本实用新型的保护范围并不局限于这样的特别陈述和实施例。本领域的普通技术人员可以根据本实用新型公开的这些技术启示做出各种不脱离本实用新型实质的其它各种具体变形和组合,这些变形和组合仍然在本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1