一种多关节机械臂的制作方法
1.本实用新型涉及机械臂技术领域,更具体的是涉及一种多关节机械臂。
背景技术:
2.机械臂是一种高精度、高速点胶机器手,具有特殊的操作灵活性,随着工业生产效率逐步提升,技术经济发展,多关节机械臂受到工业装配、安全防爆等多个领域的广泛应用,现有的多关节机械臂一般包括若干关节,两两关节之间通过转动装置固定连接,可实现水平方向的任意转动,为了提高各关节的灵活性和夹具的夹取效率,通常会在关节表面设置滑轨以便关节和夹具滑动。
3.中国专利cn210500271u公开了一种多关节机械臂,通过驱动电机、第一皮带轮、第二皮带轮和皮带的配合,使得驱动电机能够带动立杆转动,通过立杆与第一机械臂的连接,使得第一机械臂随驱动电机转动,通过第一滑轨和气缸的配合,使得转动装置能够在第一机械臂上滑动,通过转动装置与第二机械臂的连接,使得第二机械臂能够进行水平方向的360度转动,通过第二滑轨和气缸的配合,使得夹具能够在第二机械臂上滑动,通过夹具对所要拿取的物体进行夹取,此机械臂通过立杆、第一机械臂、第二机械臂、第一滑轨、第二滑轨、气缸和转动装置的配合,使得夹具能够对旋转半径内任何位置的物体进行夹取,解决了靠近旋转中心的物体无法被拿取的问题,提高机械臂的工作效率。
4.但是,转动装置或者夹具在机械臂上滑动时,滑到滑轨尽头的停止过程中,不能快速稳定,且机械臂不能在固定筒平行方向上运动,对于不同高度的操作台不能及时作出调整,因此,针对以上问题,本实用新型提出一种多关节机械臂。
技术实现要素:
5.本实用新型的目的在于:为了解决现有机械臂滑动稳定性差、不同高度的工作台使用不方便的问题,本实用新型提供一种多关节机械臂。
6.本实用新型为了实现上述目的具体采用以下技术方案:
7.一种多关节机械臂,包括底座、固定筒、第一机械臂、转动装置、第二机械臂、夹具,固定筒与底座的上表面固定连接,第一机械臂的一端贯穿固定筒的右侧筒面与固定筒滑动连接、第一机械臂与转动装置滑动连接,转动装置的底端固定套接有第二机械臂,第二机械臂与夹具滑动连接。
8.上述中,转动装置内部设有减速电机、转杆以及两个相互啮合的齿轮,减速电机带动其中一个齿轮转动,由于啮合关系,另一个纸轮开始转动,从而带动转杆转动,转杆下端,即本实用新型中的转动装置的底端与第二机械臂固定连接,从而实现第二机械臂在水平面上进行360度转动。
9.进一步的,固定筒包括直线电机、第一滑轨、滑动件、第二滑轨、固定件,直线电机与固定筒的内腔下端固定连接,直线电机的输出轴与滑动件固定连接,第一滑轨设置在固定筒的内腔、且第一滑轨的一端固定在直线电机的上表面,另一端与固定件固定连接,第二
滑轨设置在固定筒的右侧筒面,第一机械臂的一端贯穿固定筒的右侧筒面与滑动件固定连接。
10.进一步的,第一机械臂包括第三滑轨、转动装置、第一液压缸,第一机械臂的表面设有第三滑轨,第三滑轨的内部滑动连接有转动装置,第一机械臂的上表面固定连接有第一液压缸,第一液压缸的左侧端与转动装置固定连接,转动装置的底端固定套接有第二机械臂。
11.进一步的,第三滑轨包括第一凹槽、第一弹性件、第二凹槽、第二弹性件,第一弹性件设置在第一凹槽内部,第一凹槽设置在第三滑轨的一端,第二弹性件设置在第二凹槽内部,第二凹槽设置在第三滑轨的另一端。
12.更进一步的,第一弹性件和第二弹性件均为橡胶块。
13.进一步的,第二机械臂包括第四滑轨、第二液压缸、夹具,第二机械臂的表面设有第四滑轨,第四滑轨的内部滑动连接有夹具,第二机械臂的上表面固定连接第二液压缸,第二液压缸的左侧端与夹具固定连接。
14.进一步的,第四滑轨包括第三凹槽、第三弹性件、第四凹槽、第四弹性件,第三弹性件设置在第三凹槽内部,第三凹槽设置在第四滑轨的一端,第四弹性件设置在第四凹槽内部,第四凹槽设置在第四滑轨的另一端。
15.更进一步的,第三弹性件和第四弹性件均为橡胶块。
16.上述中,底座上表面还设置有若干个配重块。
17.本实用新型的有益效果如下:
18.1、本实用新型一种多关节机械臂通过在底座上设置若干个配重块实现底座平稳,并通过在底座上设置固定筒进一步方便安装第一机械臂和第二机械臂,利用固定筒内腔和筒面上设置的滑轨实现滑动件的滑动,从而实
19.现第一机械臂和第二机械臂可以根据不同高度的工作台进行随时调整,
20.方便抓取物件;
21.2、本实用新型一种多关节机械臂通过分别在第三滑轨和第四滑轨的两端设置凹槽,并在凹槽内安置弹性件,可在转动装置和夹具滑到轨道尽头位置时,快速稳定,准确盼盼需要工作抓取物件的位置,提高抓取效率。
附图说明
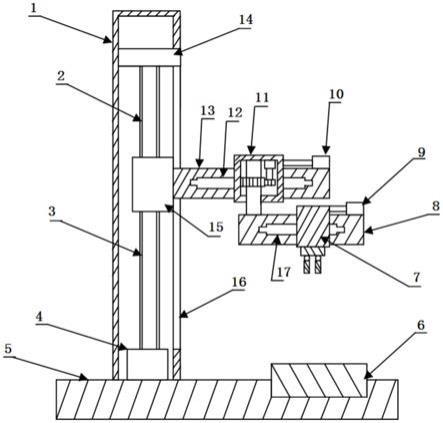
22.图1是本实用新型一种多关节机械臂的结构示意图;
23.图2是本实用新型一种多关节机械臂的第三滑轨结构示意图;
24.图3是本实用新型一种多关节机械臂的第四滑轨结构示意图;
25.附图标记:1
‑
固定筒;2
‑
第一滑轨;3
‑
输出轴;4
‑
直线电机;5
‑
底座;6
‑
配重块; 7
‑
夹具;8
‑
第二机械臂;9
‑
第二液压缸;10
‑
第一液压缸;11
‑
转动装置;12
‑
第三滑轨;13
‑
第一机械臂;14
‑
固定件;15
‑
滑动件;16
‑
第二滑轨;121
‑
第一凹槽;122
‑
第二凹槽;123
‑
第一弹性件;124
‑
第二弹性件;171
‑
第三凹槽;172
‑
第四凹槽;173
‑
第三弹性件;174
‑
第四弹性件。
具体实施方式
26.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新
型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,
27.实施例
28.如图1
‑
3所示,本实施例提供一种多关节机械臂,包括底座5、固定筒1、第一机械臂13、转动装置11、第二机械臂8、夹具7,所述固定筒1与底座5的上表面固定连接,第一机械臂13的一端贯穿固定筒1的右侧筒面与固定筒1滑动连接、第一机械臂13与转动装置11滑动连接,转动装置11的底端固定套接有第二机械臂8,第二机械臂8与夹具7滑动连接。
29.上述中,转动装置中内部设有减速电机、转杆以及两个相互啮合的齿轮,减速电机带动其中一个齿轮转动,由于啮合关系,另一个纸轮开始转动,从而带动转杆转动,转杆下端,即本实用新型中的转动装置的底端与第二机械臂固定连接,从而实现第二机械臂在水平面上进行360度转动。
30.进一步的,固定筒1包括直线电机4、第一滑轨2、滑动件15、第二滑轨16、固定件14,直线电机4与固定筒1的内腔下端固定连接,直线电机4的输出轴3与滑动件15固定连接,第一滑轨2设置在固定筒1的内腔、且第一滑轨2的一端固定在直线电机4的上表面,另一端与固定件14固定连接,第二滑轨16设置在固定筒1的右侧筒面,第一机械臂13的一端贯穿固定筒1的右侧筒面与滑动件15固定连接。
31.进一步的,第一机械臂13包括第三滑轨12、转动装置11、第一液压缸10,第一机械臂13的表面设有第三滑轨12,第三滑轨12的内部滑动连接有转动装置11,第一机械臂13的上表面固定连接有第一液压缸10,第一液压缸10的左侧端与转动装置11 固定连接,转动装置11的底端固定套接有第二机械臂8,其中,第三滑轨12包括第一凹槽121、第一橡胶块123、第二凹槽122、第二橡胶块124,第一橡胶块123设置在第一凹槽121内部,第一凹槽121设置在第三滑轨12的一端,第二橡胶块124设置在第二凹槽122内部,第二凹槽122设置在第三滑轨12的另一端。
32.进一步的,第二机械臂8包括第四滑轨17、第二液压缸9、夹具7,第二机械臂8 的表面设有第四滑轨17,第四滑轨17的内部滑动连接有夹具7,第二机械臂8的上表面固定连接第二液压缸9,第二液压缸9的左侧端与夹具7固定连接,其中,第四滑轨 17包括第三凹槽171、第三橡胶块173、第四凹槽172、第四橡胶块174,第三橡胶块 173设置在第三凹槽171内部,第三凹槽171设置在第四滑轨17的一端,第四橡胶块 174设置在第四凹槽172内部,第四凹槽172设置在第四滑轨17的另一端。
33.本实用新型一种多关节机械臂通过分别在第三滑轨和第四滑轨的两端设置凹槽,并在凹槽内安置橡胶块,可在转动装置和夹具滑到轨道尽头位置时,有一个缓冲作用,减少对滑轨端面的挤压,可快速稳定,准确盼盼需要工作抓取物件的位置,提高抓取效率。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1