一种整形对位平台装置的制作方法
1.本实用新型涉及玻璃面板加工技术领域,具体指一种整形对位平台装置。
背景技术:
2.目前显示屏产品加工前机械精定位都是气缸夹紧或电机皮带夹紧校正机构,气缸夹紧机构的可调节性不足,对产品的形位精度要求较高。而电机夹紧机构一般采用同步带传动,居中定位的定位精度不稳定,其原因在于:皮带用久了会变长,齿隙会增大,精度变差,且一段时间后要更换同步带,同步带成了耗材品,更换也不方便。同步带用久了会产生微小颗粒物,影响显示屏质量。定位柱采用硅胶管套管,夹紧的时候,套管会变形,影响定位精度;此外,硅胶套管很容易被玻璃割破,需要经常更换;玻璃屏在割破硅胶套管的时候会嵌到套管里面,在夹紧松开的时候玻璃屏会被带动,影响了精度,导致不良率上升。因此,现有技术还有待于改进和发展。
技术实现要素:
3.本实用新型的目的在于针对现有技术的缺陷和不足,提供一种结构合理、定位准确、耐磨稳定的整形对位平台装置。
4.为了实现上述目的,本实用新型采用以下技术方案:
5.本实用新型所述的一种整形对位平台装置,包括底座和治具,所述治具通过机架固定设置在底座上方,治具上设有若干可活动的定位柱,定位柱的夹持端上设有peek夹套;所述底座上设有联动机构和驱动电机,联动机构分别与若干定位柱配合连接,机架上可转动地设有丝杆,丝杆与联动机构传动连接,驱动电机的输出端与丝杆传动连接从而通过联动机构驱动若干定位柱。
6.根据以上方案,所述治具上开设有十字滑槽,若干定位柱可活动地穿设于十字滑槽上,若干定位柱两两配对从而在十字滑槽上构成纵向夹持爪和横向夹持爪,纵向夹持爪和横向夹持爪分别与联动机构配合连接。
7.根据以上方案,所述联动机构包括横向夹紧臂和纵向夹紧臂,机架上设有两根配对的横向夹紧臂,横向夹紧臂与机架配合连接,两根横向夹紧臂分别与横向夹持爪的两个定位柱固定连接。
8.根据以上方案,所述机架上设有两根配对的纵向夹紧臂,纵向夹紧臂错位设置在横向夹紧臂下方,且纵向夹紧臂与机架配合连接,两根纵向夹紧臂分别与纵向夹持爪的两个定位柱固定连接。
9.根据以上方案,所述机架上沿纵向和横向均设有丝杆,且丝杆上均设有正反传动副,纵向丝杆上的正反传动副分别与两个纵向夹紧臂固定连接,横向丝杆上的正反传动副分别与两个横向夹紧臂固定连接;所述机架上设有纵向驱动电机和横向驱动电机,且两个驱动电机分别通过联轴器连接纵向丝杆和横向丝杆。
10.本实用新型有益效果为:本实用新型结构合理,驱动电机通过丝杆、正反传动副驱
动夹持爪,避免了同步带变形造成的精度误差,防止磨损颗粒污染物的产生,定位柱配合peek夹套居中夹紧产品,防止产品割破硅胶被硅胶软管带出来风险,保证产品的良品率。
附图说明
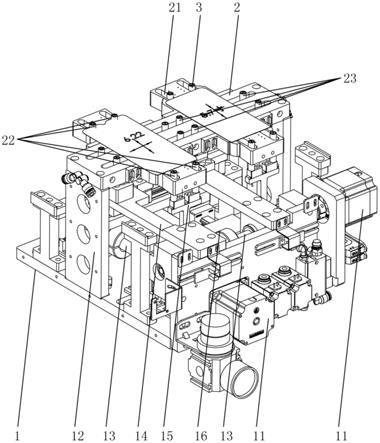
11.图1是本实用新型的整体结构示意图;
12.图2是本实用新型的定位柱剖面结构示意图。
13.图中:
14.1、底座;2、治具;3、定位柱;11、驱动电机;12、机架;13、丝杆;14、横向夹紧臂;15、纵向夹紧臂;16、正反传动副;21、十字滑槽;22、纵向夹持爪;23、横向夹持爪;31、peek夹套。
具体实施方式
15.下面结合附图与实施例对本实用新型的技术方案进行说明。
16.如图1所示,本实用新型所述的一种整形对位平台装置,包括底座1和治具2,所述治具2通过机架12固定设置在底座1上方,治具2上设有若干可活动的定位柱3,定位柱3的夹持端上设有peek夹套31;所述底座1上设有联动机构和驱动电机11,联动机构分别与若干定位柱3配合连接,机架12上可转动地设有丝杆13,丝杆13与联动机构传动连接,驱动电机11的输出端与丝杆13传动连接从而通过联动机构驱动若干定位柱3。所述驱动电机11通过丝杆13与联动机构传动连接,丝杆13传动方式的准确性高,可以有效控制治具2上的定位柱3运动精度,且丝杆13的机械传动方式稳定性更强,避免了同步带传动方式变形造成精度下降问题,损耗更少也不会产生微小颗粒污染,保证加工环境和显示屏表面的清洁度。所述定位柱3上套装peek夹套31具有结构强度高、耐磨防割裂的特点,从而避免传统硅胶套管的变形引起的定位误差,可有效提高产品的成品率。
17.所述治具2上开设有十字滑槽21,若干定位柱3可活动地穿设于十字滑槽21上,若干定位柱3两两配对从而在十字滑槽21上构成纵向夹持爪22和横向夹持爪23,纵向夹持爪22和横向夹持爪23分别与联动机构配合连接。所述纵向夹持爪22和荷香夹持爪23通过十字滑槽21的位移路径控制,对治具2上的显示屏构成四边限位从而保证定位精度。
18.所述联动机构包括横向夹紧臂14和纵向夹紧臂15,机架12上设有两根配对的横向夹紧臂14,横向夹紧臂14与机架12配合连接,两根横向夹紧臂14分别与横向夹持爪23的两个定位柱3固定连接。所述横向夹紧臂14用于驱动横向活动的定位柱3,通过两组配对的定位柱3构成的横向夹持爪22实现显示屏的夹持。
19.所述机架12上设有两根配对的纵向夹紧臂15,纵向夹紧臂15错位设置在横向夹紧臂14下方,且纵向夹紧臂15与机架12配合连接,两根纵向夹紧臂15分别与纵向夹持爪22的两个定位柱3固定连接。所述纵向夹紧臂15用于驱动纵向活动的定位柱3,通过两组配对的定位柱3构成的纵向夹持爪22实现显示屏的夹持。
20.所述机架12上沿纵向和横向均设有丝杆13,且丝杆13上均设有正反传动副16,纵向丝杆13上的正反传动副16分别与两个纵向夹紧臂15固定连接,横向丝杆13上的正反传动副16分别与两个横向夹紧臂14固定连接;所述机架12上设有纵向驱动电机11和横向驱动电机11,且两个驱动电机11分别通过联轴器连接纵向丝杆13和横向丝杆13。两个驱动电机11分别通过纵向和横向的丝杆13驱动横向夹紧臂14和纵向夹紧臂15,正反传动副16带动纵向
夹持爪22和横向夹持爪23同步动作,从而对显示屏构成纵横定位夹持以保证定位精度。
21.以上所述仅是本实用新型的较佳实施方式,故凡依本实用新型专利申请范围所述的构造、特征及原理所做的等效变化或修饰,均包括于本实用新型专利申请范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1