一种基于压电陶瓷的定位平台
1.本实用新型涉及定位平台技术领域,尤其涉及一种基于压电陶瓷的定位平台。
背景技术:
2.定位技术的发展程度是国家实力重要的衡量标准,是对国家综合制造能力与科技水平的重大考验,近年来,随着生物工程、光电子工程、微电子工程、医学工程以及材料科学工程等领域的研究逐渐深入,对定位技术的精度要求也日益提高,而定位平台作为定位技术中重要的一环,其精准程度直接决定了定位技术的优劣,为实现其高精度的要求,近年来国内外的一些学者开始将目光转移到压电陶瓷上,压电陶瓷具有高响应、结构灵活、分辨率高、无磁性的优点,被广泛应用在精密设备内,但直接采用纯压电陶瓷进行驱动,仅依靠材料自身产生的形变来提供位移,将导致其运动范围过小,因此人们往往采用压电陶瓷进行粘滑驱动的方式来代替纯压电陶瓷进行驱动,粘滑驱动具有结构简单、精度高的优点,但当负载物过重时,会严重影响粘滑驱动时的工作效率,并且粘滑驱动在回退时会产生一段负位移,从而影响整体定位精度,而大多数定位平台做到高精度定位的同时,却无法实现大行程的技术要求。
3.但目前定位平台仍面临着以下几点问题。
4.(1)粘滑驱动实质是以摩擦力作为动力源进行驱动,但当负载过大时,粘滑驱动所产生的摩擦力不足,导致定位精度不准确,严重影响整个微动定位平台的工作效率。
5.(2)粘滑驱动是以“粘”和“滑”两种状态通过摩擦力进行驱动,但在“滑”运动时会产生一段回退位移,进而影响整个微动定位平台的定位精度。
6.(3)现有的传统定位平台中,往往都是行程大却精度低,精度高行程小,使得二维转台不能同时具备大行程和高精度的工作要求。
技术实现要素:
7.本实用新型提供一种基于压电陶瓷的定位平台,已解决现有传统粘滑驱动中对过重物体驱动力不足,以及抑制粘滑驱动中所产生的回退运动,实现整个微动定位平台的运动连续性,并且解决二维转台不能同时具备大行程和高精度的工作要求。
8.本实用新型所述采取的技术方案是:包括微动定位平台、宏动水平转台、宏动方位转台,所述的微动定位平台通过螺栓连接固定在所述的宏动水平转台上,所述的宏动方位转台放置在地面上,所述的宏动水平转台通过螺栓连接固定在宏动方位转台上。
9.本实用新型所述的微动定位平台包括:x向底板、x向定位平台、y向底板、y向定位平台、工作台,所述的x向底板通过螺栓连接固定在所述的u型工作台上,所述的x向定位平台通过螺栓紧固连接在x向底板上,所述的y向底板通过螺栓连接固定与x向定位平台上,所述的y向定位平台与y向底板通过螺栓紧固连接,所述的工作台通过螺栓紧固连接在y向定位平台上。
10.本实用新型所述的x向定位平台包括:x向滑轨、x向滑块、y向箝位机构ⅰ、y向箝位
机构ⅱ、x向驱动机构,所述的x向滑轨通过螺栓连接固定在所述的x向底板上,所述的x向滑块装配在所述的x向滑轨内,所述的y向箝位机构ⅰ、所述的y向箝位机构ⅱ和所述的x向驱动机构均通过螺栓紧固连接在x向底板上,y向箝位机构ⅰ和y向箝位机构ⅱ的结构及工作原理均相同。
11.本实用新型所述的y向箝位机构包括:挡板ⅰ、放大机构ⅰ、放大机构ⅱ、柔性铰链ⅰ、压电陶瓷i,所述的y向箝位机构ⅰ为对称式结构,所述的压电陶瓷ⅰ所产生的位移传递给所述的放大机构ⅰ和放大机构ⅱ,放大后的位移通过所述的柔性铰链ⅰ传递给所述的挡板ⅰ。
12.本实用新型所述的x向驱动机构包括:压电陶瓷ⅱ、压电陶瓷ⅲ、平行四边形铰链i、平行四边形铰链ⅱ、基座ⅰ、预紧螺栓i、预紧螺栓ⅱ、动楔块i、主动楔块i、动楔块ⅱ、主动楔块ⅱ,所述的压电陶瓷ⅱ和所述的压电陶瓷ⅲ分别固联于所述的平行四边形铰链i和所述的平行四边形铰链ⅱ内,并分别与动楔块i和动楔块ⅱ接触,平行四边形铰链ⅰ和平行四边形铰链ⅱ通过焊接固定于所述的基座ⅰ上,所述的基座ⅰ通过螺栓连接固定在所述的x向底板上,所述的动楔块i与所述的主动楔块i相对安装在所述的基座ⅰ内为压电陶瓷ⅱ进行预紧,主动楔块i通过所述的预紧螺栓i与基座ⅰ相连,所述的动楔块ⅱ与所述的主动楔块ⅱ相对安装在所述的基座ⅰ内为压电陶瓷ⅲ进行预紧,主动楔块ⅱ通过所述的预紧螺栓ⅱ与基座ⅰ相连。
13.本实用新型所述的y向定位平台包括:y向滑轨、y向滑块、x向箝位机构ⅰ、x向箝位机构ⅱ、y向驱动机构,所述的y向滑轨通过螺栓连接固定在所述的y向底板上,所述的y向滑块装配在所述的y向滑轨内,所述的x向箝位机构ⅰ、所述的x向箝位机构ⅱ和所述的y向驱动机构均通过螺栓紧固连接在所述的y向底板上, x向箝位机构ⅰ和x向箝位机构ⅱ的结构及工作原理均相同。
14.本实用新型所述的x向箝位机构ⅰ包括:挡板ⅱ、放大机构ⅲ、放大机构ⅳ、柔性铰链ⅱ、压电陶瓷ⅳ,所述的x向箝位机构ⅰ为对称式结构,所述的压电陶瓷ⅳ所产生的位移传递给放大机构ⅲ和放大机构ⅳ,放大后的位移通过柔性铰链ⅱ传递给挡板ⅱ。
15.本实用新型所述的y向驱动机构包括:压电陶瓷
ⅴ
、压电陶瓷
ⅵ
、平行四边形铰链ⅲ、平行四边形铰链ⅳ、基座ⅱ、预紧螺栓ⅲ、预紧螺栓ⅳ、动楔块ⅲ、主动楔块ⅲ、动楔块ⅳ、主动楔块ⅳ,所述的压电陶瓷
ⅴ
和所述的压电陶瓷
ⅵ
分别固联于所述的平行四边形铰链ⅲ和所述的平行四边形铰链ⅳ内,并分别与所述的动楔块ⅲ和所述的动楔块ⅳ接触,平行四边形铰链ⅲ和平行四边形铰链ⅳ通过焊接固定于所述的基座ⅱ上,所述的基座ⅱ通过螺栓连接固定在所述的y向底板上,所述的动楔块ⅲ与所述的主动楔块ⅲ相对安装在所述的基座ⅱ内为压电陶瓷
ⅴ
进行预紧,主动楔块ⅲ通过所述的预紧螺栓ⅲ与基座ⅱ相连,所述的动楔块ⅳ与主动楔块ⅳ相对安装在所述的基座ⅱ内为压电陶瓷
ⅵ
进行预紧,主动楔块ⅳ通过所述的预紧螺栓ⅳ与基座ⅱ相连。
16.本实用新型所述的宏动水平转台包括:空心轴电机ⅰ、主动转轴ⅰ、深沟球轴承、从动转轴、主框架、u型工作台、编码器ⅰ、角接触轴承,所述的空心轴电机ⅰ通过螺栓固定在所述的主框架上,所述的主动转轴ⅰ通过所述的深沟球轴承连接于主框架上,所述的从动转轴通过所述的角接触轴承连接于主框架上,所述的u型工作台通过螺栓固定于主动转轴和从动转轴之间,所述的编码器ⅰ固联于从动转轴上。
17.本实用新型所述的宏动方位转台包括:空心轴电机ⅱ、副框架、主动转轴ⅱ、编码
器ⅱ、圆锥滚子轴承,所述的空心轴电机ⅱ通过螺栓固定在所述的副框架上,所述的主动转轴ⅱ与所述的副框架通过所述的圆锥滚子轴承相连,所述的编码器ⅱ固联于空心轴电机ⅱ上。
18.与现有技术相比,本实用新型的优点是
19.(1)本实用新型的微动定位平台,与传统粘滑驱动方式不同,该微动定位平台采用箝位机构对滑轨施加压力,可为粘滑驱动过程中增加驱动力,在承载物重量较大时依旧保持准确度。
20.(2)本实用新型的微动定位平台,采用粘滑驱动并附加两个箝位机构的运动形式,可有效避免粘滑驱动在回退阶段所产生的负位移,并且将单步微位移进行累加,形成连续的精密位移输出。
21.(3)本实用新型采用宏微结合技术,微动定位平台采用粘滑驱动并附加两个箝位机构的方式负责进行高精度定位,宏动水平转台和宏动方位转台进行大行程运动,使得二维转台获得大行程且高精度的工作要求。
附图说明
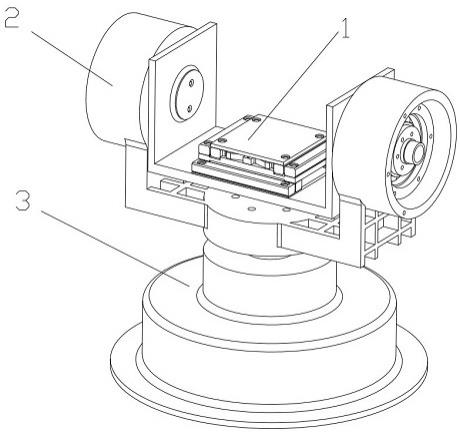
22.图1是本实用新型结构示意图;
23.图2是本实用新型微动定位平台的结构示意图;
24.图3是本实用新型x向定位平台的结构示意图;
25.图4是本实用新型y向箝位机构的结构示意图;
26.图5是本实用新型x向驱动机构的结构示意图;
27.图6是本实用新型y向定位平台的结构示意图;
28.图7是本实用新型x向箝位机构的结构示意图;
29.图8是本实用新型y向驱动机构的结构示意图;
30.图9是本实用新型宏动水平转台的剖面图;
31.图10是本实用新型宏动方位转台的剖面图;
32.图11是本实用新型x向定位平台运动原理示意图;
33.附图标记说明:微动定位平台1、宏动水平转台2、宏动方位转台3、x向底板1
‑
1、x向定位平台1
‑
2、y向底板1
‑
3、y向定位平台1
‑
4、工作台1
‑
5、x向滑轨1
‑2‑
1、x向滑块1
‑2‑
2、y向箝位机构ⅰ1
‑2‑
3、y向箝位机构ⅱ1
‑2‑
4、x向驱动机构1
‑2‑
5、挡板ⅰ1
‑2‑3‑
1、放大机构ⅰ1
‑2‑3‑
2、放大机构ⅱ1
‑2‑3‑
3、柔性铰链ⅰ1
‑2‑3‑
4、压电陶瓷i1
‑2‑3‑
5、压电陶瓷ⅱ1
‑2‑5‑
1、压电陶瓷ⅲ1
‑2‑5‑
2、平行四边形铰链i1
‑2‑5‑
3、平行四边形铰链ⅱ1
‑2‑5‑
4、基座ⅰ1
‑2‑5‑
5、预紧螺栓i1
‑2‑5‑
6、预紧螺栓ⅱ1
‑2‑5‑
7、动楔块i1
‑2‑5‑
8、主动楔块i1
‑2‑5‑
9、动楔块ⅱ1
‑2‑5‑
10、主动楔块ⅱ1
‑2‑5‑
11、y向滑轨1
‑4‑
1、y向滑块1
‑4‑
2、x向箝位机构ⅰ1
‑4‑
3、x向箝位机构ⅱ1
‑4‑
4、y向驱动机构1
‑4‑
5、挡板ⅱ1
‑4‑3‑
1、放大机构ⅲ1
‑4‑3‑
2、放大机构ⅳ1
‑4‑3‑
3、柔性铰链ⅱ1
‑4‑3‑
4、压电陶瓷ⅳ1
‑4‑3‑
5、压电陶瓷
ⅴ1‑4‑5‑
1、压电陶瓷
ⅵ1‑4‑5‑
2、平行四边形铰链ⅲ1
‑4‑5‑
3、平行四边形铰链ⅳ1
‑4‑5‑
4、基座ⅱ1
‑4‑5‑
5、预紧螺栓ⅲ1
‑4‑5‑
6、预紧螺栓ⅳ1
‑4‑5‑
7、动楔块ⅲ1
‑4‑5‑
8、主动楔块ⅲ1
‑4‑5‑
9、动楔块ⅳ1
‑4‑5‑
10、主动楔块ⅳ1
‑4‑5‑
11、空心轴电机ⅰ2
‑
1、主动转轴ⅰ2
‑
2、深沟球轴承2
‑
3、从动转轴2
‑
4、主框架2
‑
5、u型工作台2
‑
6、编码器ⅰ2
‑
7、角接触轴承2
‑
8、空心轴电机ⅱ3
‑
1、副框架3
‑
2、主动转轴ⅱ3
‑
3、编码器ⅱ3
‑
4、圆锥滚子轴承3
‑
5。
具体实施方式
34.如图1所示,包括微动定位平台1、宏动水平转台2、宏动方位转台3,所述的微动定位平台1通过螺栓连接固定在所述的宏动水平转台2上,用以实现高精度定位,所述的宏动方位转台3放置在地面上,所述的宏动水平2转台通过螺栓连接固定在宏动方位转台3上,宏动水平转台2和宏动方位转台3可实现大行程运动。
35.如图2所示,所述的微动定位平台1包括:x向底板1
‑
1、x向定位平台1
‑
2、y向底板1
‑
3、y向定位平台1
‑
4、工作台1
‑
5,所述的x向底板1
‑
1通过螺栓连接固定在所述的u型工作台2
‑
6上,所述的x向定位平台1
‑
2通过螺栓紧固连接在x向底板1
‑
1上,可使微动定位平台1可进行x方向位移,所述的y向底板1
‑
3通过螺栓连接固定与x向定位平台1
‑
2上,y向底板1
‑
3随x向定位平台1
‑
2一起移动,所述的y向定位平台1
‑
4与y向底板1
‑
3通过螺栓紧固连接,y向定位平台1
‑
4即可在x向定位平台1
‑
2基础上进行运动,从而可进行xy两自由度定位,所述的工作台1
‑
5通过螺栓紧固连接在y向定位平台1
‑
4上,将承载物放在工作台1
‑
5上,即可完成最终定位。
36.如图3所示,所述的x向定位平台1
‑
2包括:x向滑轨1
‑2‑
1、x向滑块1
‑2‑
2、y向箝位机构ⅰ1
‑2‑
3、y向箝位机构ⅱ1
‑2‑
4、x向驱动机构1
‑2‑
5,所述的x向滑轨1
‑2‑
1通过螺栓连接固定在所述的x向底板1
‑
1上,所述的x向滑块1
‑2‑
2装配在所述的x向滑轨1
‑2‑
1内,运动时,x向滑轨1
‑2‑
1起导向作用,所述的y向箝位机构ⅰ1
‑2‑
3、所述的y向箝位机构ⅱ1
‑2‑
4和所述的x向驱动机构1
‑2‑
5均通过螺栓紧固连接在x向底板1
‑
1上,y向箝位机构ⅰ1
‑2‑
3和y向箝位机构ⅱ1
‑2‑
4的结构相同,通过y向箝位机构ⅰ1
‑2‑
3和y向箝位机构ⅱ1
‑2‑
4依次对x向滑块1
‑2‑
2施加压力,同时x向驱动机构1
‑2‑
5对x向滑块1
‑2‑
2进行驱动,即可实现x向定位。
37.如图4所示,所述的y向箝位机构ⅰ1
‑2‑
3包括:挡板ⅰ1
‑2‑3‑
1、放大机构ⅰ1
‑2‑3‑
2、放大机构ⅱ1
‑2‑3‑
3、柔性铰链ⅰ1
‑2‑3‑
4、压电陶瓷i1
‑2‑3‑
5,所述的y向箝位机构ⅰ1
‑2‑
3为对称式结构,压电陶瓷ⅰ1
‑2‑3‑
4所产生的位移传递给所述的放大机构ⅰ1
‑2‑3‑
2和放大机构ⅱ1
‑2‑3‑
3,放大后的位移通过所述的柔性铰链ⅰ1
‑2‑3‑
4传递给所述的挡板ⅰ1
‑2‑3‑
1,从而将压电陶瓷i1
‑2‑3‑
5所产生的位移更好的对x向滑块1
‑2‑
2施加y向压力,对x向滑块1
‑2‑
2施加y向压力时将放大位移传递给x向滑块1
‑2‑
2,并且由于存在柔性铰链ⅰ1
‑2‑3‑
4,更容易将x向驱动机构1
‑2‑
5产生的x向位移传递给x向滑块1
‑2‑
2移动。
38.如图5所示,所述的x向驱动机构1
‑2‑
5包括:压电陶瓷ⅱ1
‑2‑5‑
1、压电陶瓷ⅲ1
‑2‑5‑
2、平行四边形铰链i1
‑2‑5‑
3、平行四边形铰链ⅱ1
‑2‑5‑
4、基座ⅰ1
‑2‑5‑
5、预紧螺栓i1
‑2‑5‑
6、预紧螺栓ⅱ1
‑2‑5‑
7、动楔块i1
‑2‑5‑
8、主动楔块i1
‑2‑5‑
9、动楔块ⅱ1
‑2‑5‑
10、主动楔块ⅱ1
‑2‑5‑
11,所述的压电陶瓷ⅱ1
‑2‑5‑
1和所述的压电陶瓷ⅲ1
‑2‑5‑
2分别固联于所述的平行四边形铰链i1
‑2‑5‑
3和所述的平行四边形铰链ⅱ1
‑2‑5‑
4内,并分别与动楔块i1
‑2‑5‑
8和动楔块ⅱ1
‑2‑5‑
10接触,平行四边形铰链ⅰ1
‑2‑5‑
3和平行四边形铰链ⅱ1
‑2‑5‑
4通过焊接固定于所述的基座ⅰ1
‑2‑5‑
5上,所述的基座ⅰ1
‑2‑5‑
5通过螺栓连接固定在所述的x向底板1
‑
1上,所述的动楔块i1
‑2‑5‑
8与所述的主动楔块i1
‑2‑5‑
9相对安装在所述的基座ⅰ1
‑2‑5‑
5内为压电陶瓷ⅱ1
‑2‑5‑
1进行预紧,主动楔块i1
‑2‑5‑
9通过所述的预紧螺栓i1
‑2‑5‑
6与基座ⅰ1
‑2‑5‑
5相连,所述的动楔块ⅱ1
‑2‑5‑
10与所述的主动楔块ⅱ1
‑2‑5‑
11相对安装在所
述的基座ⅰ1
‑2‑5‑
5内为压电陶瓷ⅲ1
‑2‑5‑
2进行预紧,主动楔块ⅱ1
‑2‑5‑
11通过所述的预紧螺栓ⅱ1
‑2‑5‑
7与基座ⅰ1
‑2‑5‑
5相连,通过分别对压电陶瓷ⅱ1
‑2‑5‑
1和压电陶瓷ⅲ1
‑2‑5‑
2进行通电,分别使平行四边形铰链ⅰ1
‑2‑5‑
3和平行四边形铰链ⅱ1
‑2‑5‑
4产生寄生运动,从而带动x向滑块1
‑2‑
2进行x向移动。
39.如图6所示,所述的y向定位平台1
‑
4包括:y向滑轨1
‑4‑
1、y向滑块1
‑4‑
2、x向箝位机构ⅰ1
‑4‑
3、x向箝位机构ⅱ1
‑4‑
4、y向驱动机构1
‑4‑
5,所述的y向滑轨1
‑4‑
1通过螺栓连接固定在所述的y向底板1
‑
3上,所述的y向滑块1
‑4‑
2装配在所述的y向滑轨1
‑4‑
1内,运动时,y向滑轨1
‑4‑
1起导向作用,所述的x向箝位机构ⅰ1
‑4‑
3、所述的x向箝位机构ⅱ1
‑4‑
4和所述的y向驱动机构1
‑4‑
5均通过螺栓紧固连接在所述的y向底板1
‑
3上, x向箝位机构ⅰ1
‑4‑
3和x向箝位机构ⅱ1
‑4‑
4的结构相同,通过x向箝位机构ⅰ1
‑4‑
3和x向箝位机构ⅱ1
‑4‑
4依次对y向滑块1
‑4‑
2施加压力,同时y向驱动机构1
‑4‑
5对y向滑块1
‑4‑
2进行驱动,即可实现y向定位。
40.如图7所示,所述的x向箝位机构ⅰ1
‑4‑
3包括:挡板ⅱ1
‑4‑3‑
1、放大机构ⅲ1
‑4‑3‑
2、放大机构ⅳ1
‑4‑3‑
3、柔性铰链ⅱ1
‑4‑3‑
4、压电陶瓷ⅳ1
‑4‑3‑
5,所述的x向箝位机构ⅰ1
‑4‑
3为对称式结构,所述的压电陶瓷ⅳ1
‑4‑3‑
5所产生的位移传递给放大机构ⅲ1
‑4‑3‑
2和放大机构ⅳ1
‑4‑3‑
3,放大后的位移通过柔性铰链ⅱ1
‑4‑3‑
4传递给挡板ⅱ1
‑4‑3‑
1,从而将压电陶瓷ⅳ1
‑4‑3‑
5所产生的位移更好的对y向滑块1
‑4‑
2施加x向压力,对y向滑块1
‑4‑
2施加x向压力时将放大位移传递给y向滑块1
‑4‑
2,并且由于存在柔性铰链ⅱ1
‑4‑3‑
4,更容易将y向驱动机构1
‑4‑
5产生的y向位移传递给y向滑块1
‑4‑
2移动。
41.如图8所示,所述的y向驱动机构1
‑4‑
5包括:压电陶瓷
ⅴ1‑4‑5‑
1、压电陶瓷
ⅵ1‑4‑5‑
2、平行四边形铰链ⅲ1
‑4‑5‑
3、平行四边形铰链ⅳ1
‑4‑5‑
4、基座ⅱ1
‑4‑5‑
5、预紧螺栓ⅲ1
‑4‑5‑
6、预紧螺栓ⅳ1
‑4‑5‑
7、动楔块ⅲ1
‑4‑5‑
8、主动楔块ⅲ1
‑4‑5‑
9、动楔块ⅳ1
‑4‑5‑
10、主动楔块ⅳ1
‑4‑5‑
11,所述的压电陶瓷
ⅴ1‑4‑5‑
1和所述的压电陶瓷
ⅵ1‑4‑5‑
2分别固联于所述的平行四边形铰链ⅲ1
‑4‑5‑
3和所述的平行四边形铰链ⅳ1
‑4‑5‑
4内,并分别与所述的动楔块ⅲ1
‑4‑5‑
8和所述的动楔块ⅳ1
‑4‑5‑
10接触,平行四边形铰链ⅲ1
‑4‑5‑
3和平行四边形铰链ⅳ1
‑4‑5‑
4通过焊接固定于所述的基座ⅱ1
‑4‑5‑
5上,所述的基座ⅱ1
‑4‑5‑
5通过螺栓连接固定在所述的y向底板1
‑
3上,所述的动楔块ⅲ1
‑4‑5‑
8与所述的主动楔块ⅲ1
‑4‑5‑
9相对安装在所述的基座ⅱ1
‑4‑5‑
5内为压电陶瓷
ⅴ1‑4‑5‑
1进行预紧,主动楔块ⅲ1
‑4‑5‑
9通过所述的预紧螺栓ⅲ1
‑4‑5‑
6与基座ⅱ1
‑4‑5‑
5相连,所述的动楔块ⅳ1
‑4‑5‑
10与主动楔块ⅳ1
‑4‑5‑
11相对安装在所述的基座ⅱ1
‑4‑5‑
5内为压电陶瓷
ⅵ1‑4‑5‑
2进行预紧,主动楔块ⅳ1
‑4‑5‑
11通过所述的预紧螺栓ⅳ1
‑4‑5‑
7与基座ⅱ1
‑4‑5‑
5相连,通过分别对压电陶瓷
ⅴ1‑4‑5‑
1和压电陶瓷
ⅵ1‑4‑5‑
2进行通电,分别使平行四边形铰链ⅲ1
‑4‑5‑
3和平行四边形铰链ⅳ1
‑4‑5‑
4产生寄生运动,从而带动y向滑块1
‑4‑
2进行y向移动。
42.如图9所示,所述的宏动水平转台2包括:空心轴电机ⅰ2
‑
1、主动转轴ⅰ2
‑
2、深沟球轴承2
‑
3、从动转轴2
‑
4、主框架2
‑
5、u型工作台2
‑
6、编码器ⅰ2
‑
7、角接触轴承2
‑
8,所述的空心轴电机ⅰ2
‑
1通过螺栓固定在所述的主框架2
‑
5上,所述的主动转轴ⅰ2
‑
2通过所述的深沟球轴承2
‑
3连接于主框架2
‑
5上,所述的从动转轴2
‑
4通过所述的角接触轴承2
‑
8连接于主框架2
‑
5上,所述的u型工作台2
‑
6通过螺栓固定于主动转轴2
‑
2和从动转轴2
‑
4之间,所述的编码器ⅰ2
‑
7固联于从动转轴2
‑
4上,通过空心轴电机ⅰ2
‑
1为动力源,以u型工作台2
‑
6实现大范
围转动。
43.如图10所示,所述的宏动方位转台3包括:空心轴电机ⅱ3
‑
1、副框架3
‑
2、主动转轴ⅱ3
‑
3、编码器ⅱ3
‑
4、圆锥滚子轴承3
‑
5,所述的空心轴电机ⅱ3
‑
1通过螺栓固定在所述的副框架3
‑
2上,所述的主动转轴ⅱ3
‑
3与所述的副框架3
‑
2通过所述的圆锥滚子轴承3
‑
5相连,所述的编码器ⅱ3
‑
4固联于空心轴电机ⅱ3
‑
1上,通过空心轴电机ⅱ3
‑
1驱动主动转轴ⅱ3
‑
3带动宏动水平转台2实现大范围转动。
44.如图11所示,为本实用新型x向定位平台1
‑
2运动原理图,x向定位平台1
‑
2结构与y向定位平台1
‑
4运动方式相同,图11(a)表示y向箝位机构ⅰ1
‑2‑
3对x向滑块1
‑2‑
2施加压力;图11(b)表示压电陶瓷ⅱ1
‑2‑5‑
1通电伸长,使平行四边形铰链i1
‑2‑5‑
3发生形变,从而产生寄生运动带动x向滑块1
‑2‑
2前进,并由于y向箝位机构ⅰ1
‑2‑
3对x向滑块1
‑2‑
2施加压力,可使运动过程中获得更大的驱动力;图11(c)表示y向箝位机构ⅰ1
‑2‑
3缩回,y向箝位机构ⅱ1
‑2‑
4对x向滑块1
‑2‑
2施加压力,压电陶瓷ⅱ1
‑2‑5‑
1断电缩回,通过y向箝位机构ⅱ1
‑2‑
4对x向滑块1
‑2‑
2施加压力可避免压电陶瓷ⅱ1
‑2‑5‑
1回退时带动平行四边形铰链i1
‑2‑5‑
3所产生的负位移;图11(d)表示y向箝位机构ⅱ1
‑2‑
4回缩,回归初始状态完成一个运动循环,重复该循环过程,可以使x向滑块1
‑2‑
2不断正方向驱动,当改变y向箝位机构ⅰ1
‑2‑
3和y向箝位机构ⅱ1
‑2‑
4的顺序且对压电陶瓷ⅲ1
‑2‑5‑
2通电时,可以实现x向滑块1
‑2‑
2反方向运动。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1