由钢索牵引的可折叠自动化机械臂的制作方法
1.本实用新型涉及机械臂,具体是涉及一种由钢索牵引的可折叠自动化机械臂。
背景技术:
2.目前自动化机械臂多采用液压机构来实现长臂和短臂的摆动,液压机构涉及到液压泵、液压缸、液压阀等部件,结构较复杂且成本高,对于机械臂负载较小的应用场景,如用液压机构将会使结构复杂并造成成本浪费。
技术实现要素:
3.本实用新型所要解决的技术问题是,克服上述背景技术的不足,提供一种由钢索牵引的可折叠自动化机械臂,可实现机械臂精确定位,结构简单,成本低廉。
4.本实用新型解决其技术问题采用的技术方案是,一种由钢索牵引的可折叠自动化机械臂,包括长臂机构和短臂机构,短臂机构与长臂机构相连,所述长臂机构包括长臂限位支座、长臂限位块、长臂、长臂伺服电机和长臂钢索,所述长臂伺服电机通过长臂钢索与长臂连接,长臂钢索一端连接在长臂上,另一端连接在长臂伺服电机上,通过长臂伺服电机卷绕或松开长臂钢索实现长臂来回摆动,所述长臂限位块设于长臂限位支座上靠近长臂的一侧;所述短臂机构包括短臂伺服电机、短臂钢索、短臂、触头和短臂限位块,短臂与长臂活动连接,所述短臂伺服电机通过短臂钢索与短臂连接,通过短臂伺服电机卷绕或松开短臂钢索实现短臂来回摆动,所述触头设于短臂一端,所述短臂限位块设于长臂上。
5.进一步,触头可通过改变其结构或加装机构并结合机械臂的动作实现但不局限于书写、绘画、擦拭、照射等功能。
6.进一步,长臂限位块起到对长臂回位折叠时的限位作用。短臂限位块起到对短臂回位折叠时的限位作用。
7.进一步,所述长臂机构还包括长臂回位弹簧,所述长臂通过长臂回位弹簧与长臂限位支座连接,长臂回位弹簧一端连接在长臂上,另一端连接在长臂限位支座上。
8.进一步,所述短臂机构还包括短臂回位弹簧,短臂回位弹簧一端与长臂连接,另一端与长臂连接。
9.进一步,所述短臂机构还包括钢索导向滑轮和定滑轮,钢索导向滑轮设于长臂上,所述短臂钢索经定滑轮及钢索导向滑轮与短臂另一端连接,所述定滑轮与长臂活动连接。在短臂较大幅度的摆动过程中,钢索导向滑轮能控制短臂钢索的走向从而不让短臂钢索与长臂干涉。定滑轮用于改变短臂伺服电机的拉力方向,使短臂钢索对短臂的拉力的有效分量最大化。
10.进一步,所述定滑轮通过长臂铰接轴承与长臂铰接。
11.进一步,所述短臂通过短臂铰接轴承与长臂铰接。
12.进一步,还包括基座,所述短臂伺服电机、长臂伺服电机和长臂限位支座安装于基座上。
13.进一步,还包括基座,所述定滑轮安装于基座上。
14.进一步,所述短臂伺服电机和长臂伺服电机装有绝对值编码器。
15.与现有技术相比,本实用新型的优点如下:
16.本实用新型在机械臂负载较小的应用场景下精确控制钢索长度来实现机械臂精确定位,结构简单,成本低廉,有效解决了在机械臂负载较小的应用场景下使用液压机构带来的结构复杂,成本高昂的问题。
附图说明
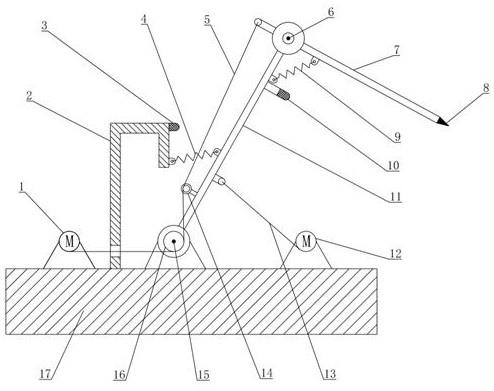
17.图1是本实用新型实施例的结构示意图。
18.1—短臂伺服电机、2—长臂限位支座、3—长臂限位块、4—长臂回位弹簧、5—短臂钢索、6—短臂铰接轴承、7—短臂、8—触头、9
‑
短臂回位弹簧、10—短臂限位块、11—长臂、12—长臂伺服电机、13—长臂钢索、14—钢索导向滑轮、15—长臂铰接轴承、16—定滑轮、17—基座。
具体实施方式
19.下面结合附图及具体实施例对本实用新型作进一步详细描述。
20.参照图1,本实施例包括长臂机构、短臂机构和基座17,短臂机构与长臂机构相连。
21.长臂机构包括长臂限位支座2、长臂限位块3、长臂回位弹簧4、长臂11、长臂伺服电机12、长臂钢索13和长臂铰接轴承15,长臂伺服电机12通过长臂钢索13与长臂11连接,长臂钢索13一端连接在长臂11上,另一端连接在长臂伺服电机12上,通过长臂伺服电机12卷绕或松开长臂钢索1实现长臂11来回摆动,长臂11通过长臂回位弹簧4与长臂限位支座2连接,长臂回位弹簧4一端连接在长臂11上,另一端连接在长臂限位支座2上,长臂限位块3设于长臂限位支座2上靠近长臂11的一侧,长臂伺服电机12、长臂限位支座2安装于基座17上。
22.短臂机构包括短臂伺服电机1、短臂钢索5、短臂铰接轴承6、短臂7、触头8、短臂回位弹簧9、短臂限位块10、钢索导向滑轮14和定滑轮16,短臂7通过短臂铰接轴承6与长臂11铰接,短臂伺服电机1通过短臂钢索5与短臂7连接,通过短臂伺服电机1卷绕或松开短臂钢索5实现短臂7来回摆动,短臂钢索5经定滑轮16及设于长臂11上的钢索导向滑轮14与短臂7一端连接,触头8设于短臂7的另一端;短臂回位弹簧9一端与长臂11连接,另一端与长臂11连接,短臂限位块10设于长臂11上,短臂伺服电机1、定滑轮16安装于基座17上,定滑轮16通过长臂铰接轴承15与长臂11铰接。
23.本实用新型的工作过程如下:
24.基座17固定或按需要置于移动平台上,长臂钢索13一端连接在长臂11上,另一端连接在长臂伺服电机12上,长臂伺服电机12卷绕或松开长臂钢索13实现长臂7不同的摆动夹角。长臂伺服电机12装有绝对值编码器,对卷绕或松开的长臂钢索13的长度能精确控制,进而对长臂11绕长臂铰接轴承15的摆动夹角实现精确控制。短臂钢索5经过钢索导向滑轮14、定滑轮16与短臂伺服电机1连接,钢索导向滑轮14能够控制短臂钢索5的走向,在短臂7较大幅度的摆动过程中,钢索导向滑轮14能控制短臂钢索5的走向从而不让短臂钢索与长臂11干涉。短臂伺服电机1装有绝对值编码器,对卷绕或松开的短臂钢索5的长度能精确控制,进而能对短臂7绕短臂铰接轴承6的摆动夹角实现精确控制。长臂11和短臂7的摆动夹角
确定后,触头8的空间位置也同时被确定,所以长臂11和短臂7不同的夹角值能使触头8可达至相对应的不同的空间位置,实现完全自动化,触头可通过改变其结构或加装机构并结合机械臂的动作实现但不局限于书写、绘画、擦拭、照射等功能。
25.当工作任务完成,长臂伺服电机12松开长臂钢索13,短臂伺服电机1松开短臂钢索5,在长臂回位弹簧4和短臂回位弹簧9的作用下,长臂11和短臂7会朝弹簧拉力方向回摆,长臂11摆动到长臂限位块3处即停止运动,短臂7摆动到短臂限位块10处即停止运动,此时,机械臂完成自动折叠,折叠后可有效缩小横向占用空间。
26.本实用新型在机械臂负载较小的应用场景下精确控制钢索长度来实现机械臂精确定位,结构简单,成本低廉,有效解决了在机械臂负载较小的应用场景下使用液压机构带来的结构复杂,成本高昂的问题。
27.本领域的技术人员可以对本实用新型进行各种修改和变型,倘若这些修改和变型在本实用新型权利要求及其等同技术的范围之内,则这些修改和变型也在本实用新型的保护范围之内。
28.说明书中未详细描述的内容为本领域技术人员公知的现有技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1