移动数据收集机器人的制作方法
1.本实用新型涉及机械领域,具体地说是一种移动数据收集机器人。
背景技术:
2.机器人常被用于仓库中的货物盘点,其在货物上贴rfid标签(电子标签),仓库货物盘点机器人则通过rfid天线采集货物上rfid标签的信息进行货物盘点。然而,现有仓库货物盘点机器人的设计却并不适用于仓库中服装的盘点。因为仓库中的服装通常是挂在服装架上的,由于服装架高低不一,挂的服装也高低不一,且方向也不同,而现有仓库货物盘点机器人的rfid天线设置简单且通常是固定安装在一个位置,所以无法对不同高度和不同方向的服装进行盘点。此外,现有仓库货物盘点机器人在使用过程中,常会出现仓库盘点机器人启停不及时、定位不精准的问题,当仓库盘点机器人用于仓库盘点的时候,启停不及时、定位不精准会造成机器人位置偏离货物位置,造成盘点困难,使用不便。
技术实现要素:
3.本实用新型提供了一种移动数据收集机器人。
4.本实用新型的目的是解决现有仓库货物盘点机器人的设计不适用于仓库中服装盘点且存在的仓库盘点机器人在使用过程中启停不及时、定位不精准的问题。
5.本实用新型解决其技术问题所采用的技术方案是:一种移动数据收集机器人,包括机器人底座和设于机器人底座上的中央控制器,所述机器人底座上设有直立的天线支撑轨道、rfid读写器,所述天线支撑轨道上部设有上rfid天线,天线支撑轨道下部设有下rfid天线,天线支撑轨道中部设有中rfid天线,所述上rfid天线、中rfid天线、下rfid天线与rfid读写器通信连接,rfid读写器与中央控制器通信连接。所述机器人底座上设有驱动轮,所述驱动轮包括轮毂电机、与轮毂电机相连接的轮子,所述机器人底座上设有二维码读取器和磁导航传感器,所述二维码读取器、磁导航传感器与中央控制器通信连接,中央控制器与轮毂电机连接,用于控制轮毂电机的启停。
6.优选的,所述机器人底座上设有支承座,所述天线支撑轨道直立固定于支承座上,所述rfid读写器设于支承座内。
7.优选的,所述的天线支撑轨道上设有滑槽,所述的中rfid天线通过滑槽与天线支撑轨道连接,所述的中rfid天线沿天线支撑轨道的滑槽上下移动到适当位置后固定。
8.优选的,所述中央控制器包括中央处理器模块、显示器、无线收发模块和连接基座,中央处理器模块和无线收发模块设于中央控制器内部,显示器设于中央控制器外部,连接基座设于中央控制器的背部;所述的中央处理器模块与无线收发模块、显示器连接,中央处理器模块的功能是处理来自rfid读写器信息、二维码读取器信息、磁导航传感器信息、轮毂电机信息和无线收发模块的信息,并把处理后的信息向轮毂电机、无线收发模块和显示器发送,轮毂电机收到中央处理器模块发来的信息后,就使驱动轮自动进行前进、后退、转弯动作;无线收发模块的功能是发射和接收信息,其在收到中央处理器模块发来的处理信
息后,进行向外发射,或接收外部信息并传送到中央处理器模块;所述的中央控制器通过连接基座固定于天线支撑轨道上。
9.优选的,所述上rfid天线有两块,分别固定于天线支撑轨道上部的左侧面和右侧面;所述中rfid天线有两块,分别设于天线支撑轨道中部的左侧面和右侧面;所述下rfid天线有两块,分别固定于天线支撑轨道下部的左侧面和右侧面。
10.优选的,所述的两块上rfid天线呈八字形结构固定于天线支撑轨道的顶部。
11.优选的,所述的激光测距探头与中央处理器模块连接,激光测距探头用于探测距离并把探测到的距离信息传送给中央处理器模块处理,中央处理器模块处理后的信息发送给轮毂电机,以控制驱动轮行驶的距离。
12.优选的,所述支承座包括上支承板、上支承柱、中支承板、下支承板和下支承柱,上支承板通过上支承柱和中支承板连接,中支承板通过下支承柱和下支承板连接。
13.优选的,所述驱动轮有两个,分别为设于机器人底座左部的左驱动轮和设于机器人底座右部的右驱动轮,左驱动轮和右驱动轮对称设置,所述机器人底座四角底部各设有一个万向轮。
14.本实用新型的有益效果是:本实用新型所述的移动数据收集机器人设计合理、结构简单,转弯灵活,稳定性好。本实用新型通过在轨道上设置上中下rfid天线,克服了现有盘点机器人设计的不足,可以同时实现盘点机器人对服装架上中下三层服装的盘点。本实用新型利用二维码读取器、磁导航传感器分别检测工作区域地面上的二维码信号和磁场强度信号,两种方式共同使用,使得盘点机器人行走系统定位更加准确,启停更加及时。
附图说明
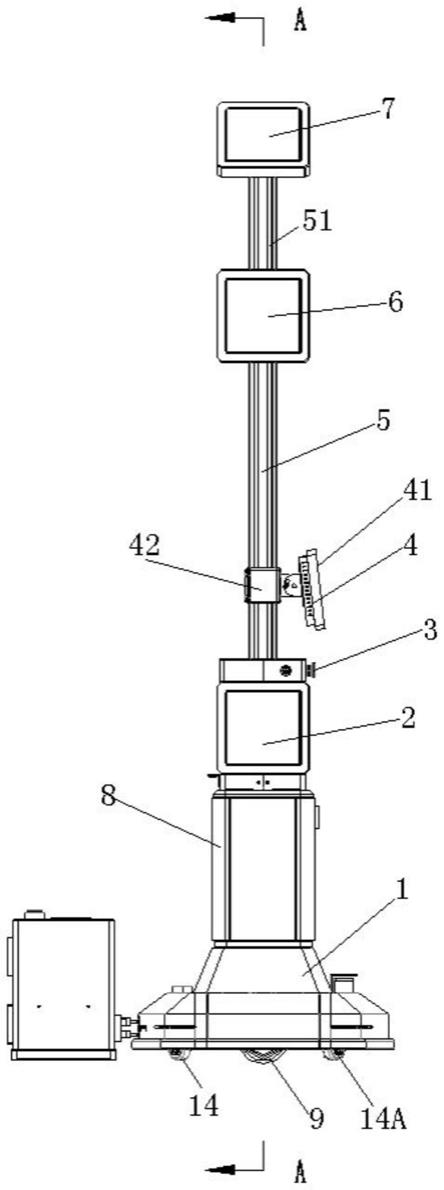
15.图1为本实用新型移动数据收集机器人的结构示意图之一。
16.图2为图1的a
‑
a剖面示意图。
17.图3为本实用新型移动数据收集机器人的结构示意图之二。
18.图4为图3的a
‑
a剖面示意图。
具体实施方式
19.下面结合附图和实施例对本实用新型进一步说明:
20.如图所示,提供了本实用新型移动数据收集机器人的实施例,包括机器人底座1,所述机器人底座1上设直立的天线支撑轨道5、rfid读写器10、中央控制器4。所述天线支撑轨道5上部设有上rfid天线7、上rfid天线7a,天线支撑轨道5下部设有下rfid天线2、下rfid天线2a,天线支撑轨道5中部设有中rfid天线6、中rfid天线6a。所述上rfid天线7、上rfid天线7a、中rfid天线6、中rfid天线6a、下rfid天线2、下rfid天线2a均与rfid读写器10通信连接。rfid读写器10与中央控制器4通信连接。所述机器人底座1上设有驱动轮9和驱动轮9a,所述驱动轮9和驱动轮9a,结构相同。所述的驱动轮9包括轮毂电机、与轮毂电机相连接的轮子。所述机器人底座1上设有二维码读取器11和磁导航传感器12,所述二维码读取器11、磁导航传感器12与中央控制器4通信连接。中央控制器4与轮毂电机连接,用于控制轮毂电机的启停。
21.所述机器人底座1上设有支承座8,所述天线支撑轨道5直立固定于支承座8上。所
述rfid读写器10设于支承座内。所述的天线支撑轨道5上设有滑槽51,所述的中rfid天线6、中rfid天线6a通过滑槽51与天线支撑轨道5连接。所述的中rfid天线6、中rfid天线6a沿天线支撑轨道5的滑槽51上下移动到适当位置后固定。所述中央控制器4包括中央处理器模块、显示器41、无线收发模块和连接基座42,中央处理器模块和无线收发模块设于中央控制器4内部,显示器41设于中央控制器外部,连接基座42设于中央控制器4的背部。所述的中央处理器模块与无线收发模块、显示器41连接。所述中央处理器模块的功能是处理来自rfid读写器10信息、二维码读取器11信息、磁导航传感器12信息、轮毂电机信息和无线收发模块的信息,并把处理后的信息向轮毂电机、无线收发模块和显示器41发送。轮毂电机收到中央处理器模块发来的信息后,就使驱动轮9和驱动轮9a自动进行前进、后退、转弯动作。无线收发模块的功能是发射和接收信息,其在收到中央处理器模块发来的处理信息后,进行向外发射,或接收外部信息并传送到中央处理器模块。所述的中央控制器4通过连接基座42固定于天线支撑轨道5上。所述中央控制器4可以为电脑一体机或平板电脑等设备。
22.如图3所示,所述上rfid天线7a和上rfid天线7有两块,分别固定于天线支撑轨道5上部的左侧面和右侧面;所述中rfid天线6a和rfid天线6有二块,分别设于天线支撑轨道5中部的左侧面和右侧面;所述下rfid天线2a和下rfid天线2有二块,分别固定于天线支撑轨道5下部的左侧面和右侧面。所述的上rfid天线7a和上rfid天线7呈八字形结构固定于天线支撑轨道5的顶部。
23.所述的激光测距探头3与中央处理器模块连接。激光测距探头3用于探测距离并把探测到的距离信息传送给中央处理器模块处理,中央处理器模块处理后的信息发送给轮毂电机,以控制驱动轮9和驱动轮9a行驶的距离。
24.所述支承座8包括上支承板16、上支承柱20、中支承板17、下支承板18和下支承柱19,上支承板16通过上支承柱20和中支承板17连接,中支承板17通过下支承柱19和下支承板18连接。所述支承座8的一侧设有风扇13。
25.所述驱动轮9和和驱动轮9a分别为设于机器人底座左部的左驱动轮和设于机器人底座右部的右驱动轮。左驱动轮和右驱动轮对称设置,所述机器人底座1四角底部各设有一个万向轮14、万向轮14a、万向轮15、万向轮15a。
26.本实用新型所述的移动数据收集机器人可以用于仓库中服装的盘点,仓库中的服装挂于服装架上,每件服装上贴有rfid标签,本移动数据收集机器人根据二维码读取器11读取到的地面二维码上的位置等信息,或/和根据磁导航传感器12读取到的地面磁条信息后,通过驱动轮9和驱动轮9a行驶至两排服装架之间,依靠其左右两块上rfid天线7a和上rfid天线7、两块中rfid天线6a和rfid天线6、两块下rfid天线2a和下rfid天线2分别采集两排服装架上的上层服装、中层服装以及下层服装的rfid标签信息,并将该rfid标签信息传送给rfid读写器,rfid读写器再将信号传递给中央控制器,中央控制器将rfid标签信息进行记录,并在显示器41上显示出来。实际使用时,rfid读写器可以控制上中下六块rfid天线全部开启以采集信号,或根据实际需求开启其中的几块rfid天线进行工作。中rfid天线可以根据服装架上中层服装的实际悬挂高度来调节中rfid天线高度,以便更好地采集信号。激光测距探头9用于探测移动数据收集机器人与仓库墙壁之间的距离,当移动数据收集机器人行走到接近墙壁上时,则此排服装架是已盘点完毕,然后移动到另一排继续盘点。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1