一种机器人转头驱动结构的制作方法
1.本实用新型涉及仿生机械技术领域,具体是一种机器人转头驱动结构。
背景技术:
2.各军旅题材景区观赏性的演出时候常常用到仿真机器人,主要用于模仿军人动作以供观赏,仿真机器人有真人一样的五官外貌;头、颈、腰、臂、手等身体主要部分均能如真人一样摆出多种姿势和动作,通过上述操作可以使机器人能够完全模拟军人步姿。
3.现有的仿生机器人可以模拟出军人在列队走方阵时的腿部运动轨迹,同时一些还能够配合手臂运动做出敬礼姿势,但是敬礼姿势需要手臂配合头部转动一起才是标准化姿势,以现在仿真机器人来说一般头部转动的驱动机构是和手臂驱动连在一起的,没有独立机构。因此,本领域技术人员提供了一种机器人转头驱动结构,以解决上述背景技术中提出的问题。
技术实现要素:
4.本实用新型的目的在于提供一种机器人转头驱动结构,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种机器人转头驱动结构,包括身部,所述身部的内部设有安装板,且安装板的顶部活动连接有分度盘,且分度盘的顶部设有搭接块,所述搭接块的顶部中心处焊接有颈连杆,所述颈连杆的顶部插接有头部,所述身部的顶端焊接有颈部,且颈部包裹颈连杆,所述安装板的顶部一侧嵌合有第一拨爪,且第一拨爪的底端贯穿安装板并套接有驱动齿轮,所述安装板的顶部另一侧活动插接有第二拨爪,且第二拨爪的底端贯穿安装板并套接有从动齿轮。
6.作为本实用新型进一步的方案:所述第一拨爪的顶部固定连接有第一稳定片,且第二拨爪的顶部固定连接有第二稳定片,所述第一稳定片和第一拨爪以及第二稳定片和第二拨爪均呈交错连接,且第一稳定片和第二稳定片呈扇形结构。
7.作为本实用新型再进一步的方案:所述安装板的两侧焊接有连接架,且连接架固定在身部的内壁上,所述安装板的中心处和头部的底端中心处在同一条直线上。
8.作为本实用新型再进一步的方案:所述驱动齿轮的一侧啮合有第一过度齿轮,且第一过度齿轮的一侧啮合有第二过度齿轮,所述第一过度齿轮和第二过度齿轮均活动连接在安装板上,且第二过度齿轮的一侧和从动齿轮啮合。
9.作为本实用新型再进一步的方案:所述驱动齿轮和从动齿轮的大小相等,且第一过度齿轮和第二过度齿轮的大小相等,所述驱动齿轮的面积是第一过度齿轮面积的两倍。
10.作为本实用新型再进一步的方案:所述分度盘上呈十字状开设有通槽,且第一拨爪和第二拨爪的前端和通槽中心重叠,所述分度盘的外侧边缘处且位于通槽之间削切有内弧,所述第一稳定片和第二稳定片与内弧互补。
11.作为本实用新型再进一步的方案:所述身部的内壁焊接有固定板,且固定板上安
装有电机,所述电机的驱动端和驱动齿轮的低端圆心处连接。
12.与现有技术相比,本实用新型的有益效果是:本装置采用齿轮带动槽轮机构实现正反转九十度间歇输出从而是机器人头部可以转动以及复位从而使机器人模拟出军人在敬礼时的头部转动,通过本装置可以实现机器人头部独立转动,从而不必通过手臂的驱动机构带动转动,这是因为在军人敬礼后手臂是先放下随后头部转回,头部和手臂采用同一个驱动带动会发生同步运动,不符合军步流程,而单独机构则可以避免这个问题,同时采用齿轮转动瞬时传动比恒定,工作平稳性较高,传动比范围大,结构紧凑,传动效率高,相比较其他驱动,其寿命更长,耐磨能力更好,动力损耗更少,本机构的九十度转动可以采用普通马达进行驱动,通过马达带动驱动齿轮转动,驱动齿轮和一个拨爪连接带动连接机器人头部的分度盘转动实现转动头部,驱动机构继续运动通过两个过度齿轮带动从动齿轮转动,通过另一个拨爪使分度盘复位,循环往复。
附图说明
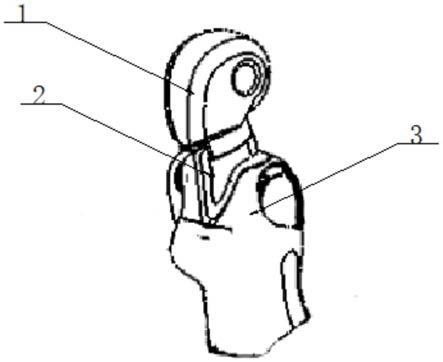
13.图1为一种机器人转头驱动结构的结构示意图;
14.图2为一种机器人转头驱动结构中内部的结构示意图;
15.图3为一种机器人转头驱动结构中九十度间歇输出机构的结构示意图。
16.图中:1、头部;2、颈部;3、身部;4、颈连杆;5、分度盘;6、连接架;7、固定板;8、电机;9、驱动齿轮;10、安装板;11、搭接块;12、第二稳定片;13、从动齿轮;14、第二拨爪;15、第二过度齿轮;16、第一过度齿轮;17、第一拨爪;18、第一稳定片。
具体实施方式
17.请参阅图1~3,本实用新型实施例中:一种机器人转头驱动结构,包括身部3,身部3的内部设有安装板10,且安装板10的顶部活动连接有分度盘5,且分度盘5的顶部设有搭接块11,搭接块11的顶部中心处焊接有颈连杆4,颈连杆4的顶部插接有头部1,身部3的顶端焊接有颈部2,且颈部2包裹颈连杆4,安装板10的顶部一侧嵌合有第一拨爪17,且第一拨爪17的底端贯穿安装板10并套接有驱动齿轮9,安装板10的顶部另一侧活动插接有第二拨爪14,且第二拨爪14的底端贯穿安装板10并套接有从动齿轮13。
18.在图2中,第一拨爪17的顶部固定连接有第一稳定片18,且第二拨爪14的顶部固定连接有第二稳定片12,第一稳定片18和第一拨爪17以及第二稳定片12和第二拨爪14均呈交错连接,且第一稳定片18和第二稳定片12呈扇形结构,第一稳定片18和第二稳定片12用于平衡第一拨爪17和第二拨爪14的运动,防止其在接触到分度盘5抖动。
19.在图2中,安装板10的两侧焊接有连接架6,且连接架6固定在身部3的内壁上,安装板10的中心处和头部1的底端中心处在同一条直线上,连接架6用于将安装板10固定在身部3内并使其悬空,分度盘5位于安装板10中心处,而分度盘5转动带动头部1转动,因此头部1和安装板10的中心处同一条直线上。
20.在图3中,驱动齿轮9的一侧啮合有第一过度齿轮16,且第一过度齿轮16的一侧啮合有第二过度齿轮15,第一过度齿轮16和第二过度齿轮15均活动连接在安装板10上,且第二过度齿轮15的一侧和从动齿轮13啮合,驱动齿轮9和从动齿轮13的转动方向相反才能使分度盘5实现正反转九十度间歇输出,从而使头部1进行转动和复位。
21.在图3中,驱动齿轮9和从动齿轮13的大小相等,且第一过度齿轮16和第二过度齿轮15的大小相等,驱动齿轮9的面积是第一过度齿轮16面积的两倍,大小相等转动速度相同,使头部1能够匀速转动和复位。
22.在图3中,分度盘5上呈十字状开设有通槽,且第一拨爪17和第二拨爪14的前端和通槽中心重叠,分度盘5的外侧边缘处且位于通槽之间削切有内弧,第一稳定片18和第二稳定片12与内弧互补,通槽方便第一拨爪17和第二拨爪14带动分度盘5转动,内弧构造是为了方便第一稳定片18和第二稳定片12在转动时不会发生抵触。
23.在图2中,身部3的内壁焊接有固定板7,且固定板7上安装有电机8,电机8的驱动端和驱动齿轮9的低端圆心处连接,固定板7用于为电机8提供安装点,电机8为驱动齿轮9提供动力。
24.本实用新型的工作原理是:本机构在运转时,通过电机8(型号为:zga25rp)为驱动齿轮9提供动力,驱动齿轮9在转动时带动和其连接的第一拨爪17转动,第一拨爪17在转动时其端部进入到分度盘5的通槽内,带动分度盘5逆时针转动九十度,在此过程中通过第一稳定片18防止第一拨爪17抖动,分度盘5在转动的过程中通过颈连杆4带动头部1转动没完成机器人头部1转动,驱动齿轮9继续转动,通过第一过度齿轮16和第二过度齿轮15将转动力传递到从动齿轮13上并使其呈和驱动齿轮9相反方向的运动,从而通过从动齿轮13带动、第二拨爪14转动,通过、第二拨爪14在转动时其端部进入到分度盘5的通槽内,再次带动分度盘5进行顺方向转动九十度,使头部1复位。
25.以上所述的,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1