一种带电作业绝缘杆的制作方法
1.本实用新型涉及带电作业机器人领域,尤其涉及一种带电作业绝缘杆。
背景技术:
2.带电作业是电力行业中技术难度大,危险程度高的常见作业方式,目前,市面上最为常见的带电作业方式主要是绝缘杆操作法,作业工人手持绝缘杆与各种工具进行快速换接,可以在地面或斗臂车实现远距离勾,拉,转,断,接等动作,该绝缘操作杆从重量,体积,使用步骤角度来看,都对工人的能力提出了很大的要求,由于带电作业属于精细化作业的范畴,绝缘杆的长度不仅影响了作业精细和质量,也对工人的人身安全增加了风险。近年来,机器人作业开始进入带电作业领域,那么有必要提供一种带电作业机器人上的无框电机绝缘杆,实现机器人与电缆的绝缘屏蔽,保护了机器人上的元器件,代替了人工作业,减轻了人工作业的难度和负荷,提高了作业的精度和安全性。
技术实现要素:
3.发明目的:本实用新型针对带电作业时手动绝缘杆存在重量大,费力,对工人作业精度要求较高,对工人人身安全有风险等缺陷,公开了一种带电作业绝缘杆,通过无框电机驱动末端工具实现不同的作业,无框电机具有输出大扭矩,重量轻等优点,整个结构设计精巧,操作简单,可靠性和适用性较强。
4.技术方案:
5.一种带电作业绝缘杆,包括:
6.驱动组件,其内设有无框电机;
7.传动组件,与所述无框电机电机轴连接,用于传递转矩;
8.对接组件,用于与工具对接,其前端与所述传动组件末端连接。
9.所述驱动组件还包括谐波减速器,其柔轮与所述无框电机固连,其波发生器与所述无框电机的电机轴固连,其钢轮连接有输出轴,所述输出轴与所述传动组件固连。
10.所述传动组件包括操作杆及套设在所述操作杆外的绝缘外杆,所述绝缘外杆与所述驱动组件固连,所述操作杆两端分别与所述输出轴和所述对接组件的驱动转轴固连。
11.在所述传动组件两端均设置有尼龙隔套,所述尼龙隔套设置在所述操作杆与所述绝缘外杆之间。
12.所述传动组件为两端对称结构,所述操作杆两端均固连有操作杆转接头,所述操作杆转接头分别与所述输出轴及所述驱动转轴对接。
13.所述操作杆两端均开设有内孔,所述操作杆转接头末端压入所述内孔内,并通过套设在所述操作杆外的销接紧固圈及弹性销固连。
14.所述输出轴和所述驱动转轴均设计为六方轴,所述操作杆转接头前端分别设置有相对应的六方孔,通过二者对应配合实现所述操作杆转接头与所述输出轴及所述对接组件的对接。
15.在所述驱动组件下方固定安装有绝缘杆固定套,所述绝缘杆固定套下端开设有内孔,所述绝缘外杆上端固定在所述绝缘杆固定套下端的内孔内。
16.在所述无框电机上设置有用于读取其电机轴当前转动角度及位置的磁编码器。
17.本实用新型与现有技术相比,具有如下有益效果:
18.1、该机构结构简单,设计精巧,采用无框电机进行轻型化的设计,符合机械臂的负载;
19.2、通过无框电机能够输出较大的力矩,提高夹线等作业的可靠性;
20.3、代替人工手持绝缘杆作业,规避了事故的风险,内杆和外杆屏蔽了机器人与电缆的接触,保护了机器人的元件。
附图说明
21.图1为本实用新型实施例中整体结构示意图;
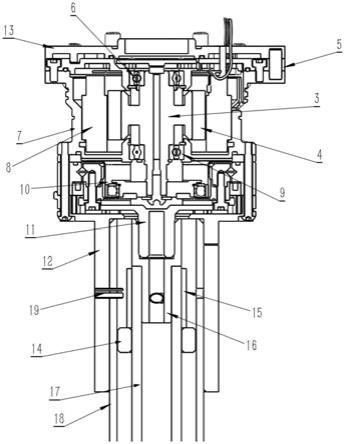
22.图2为本实用新型实施例中正面剖视图;
23.图3为本实用新型实施例中局部立体图;
24.图4为本实用新型实施例中工具端六方结构局部立体图;
25.图5为本实用新型实施例中外杆组装结构局部立体图;
26.图6为本实用新型实施例中减速器输出端结构局部立体图;
27.图中包括:1、电机组件,2、绝缘组件,3、电机轴,4、转子,5、端盖,6、上深沟球轴承,7、无框电机壳体,8、定子,9、下深沟球轴承,10、谐波减速器,11、输出轴,12、绝缘杆固定套,13、过渡端盖,14、尼龙隔套,15、销接紧固圈,16、操作杆转接头,17、绝缘内杆,18、绝缘外杆,19、弹性销,20、对正销,21、对接件,22、驱动转轴。
具体实施方式
28.下面结合附图和具体实施例,进一步阐明本实用新型。
29.本实用新型公开一种带电作业绝缘杆,图1为本实用新型实施例中整体结构示意图,如图1所示,本实用新型的带电作业绝缘杆包含电机组件1和绝缘组件2。
30.图2为本实用新型实施例中正面剖视图,如图2所示,电机组件1包含电机轴3、转子4、端盖5、上深沟球轴承6、无框电机壳体7、定子8、下深沟球轴承9、谐波减速器10、输出轴11、过渡端盖13以及绝缘杆固定套12。端盖5与无框电机壳体7的边沿均设置有螺纹孔,二者之间通过螺钉固定连接,端盖5中心设置有轴承安装孔,上深沟球轴承6压入端盖5中心的轴承安装孔内,并通过卡簧固定;无框电机壳体7中心处开设有电机槽,在电机槽底部也设置有轴承安装孔,下深沟球轴承9压入无框电机壳体7电机槽底部的轴承安装孔内,并通过卡簧固定。电机轴3表面涂抹金属胶,转子4套在电机轴3上,并通过金属胶固连;无框电机壳体7内部涂抹金属胶,定子8压入无框电机壳体7的电机槽内,并通过金属胶固连,在二者完全固化后,装有转子4的电机轴3设置在定子8内,其一端压入上深沟球轴承6内,另一端装入并穿过无框电机壳体7内电机槽底部的下深沟球轴承9。在端盖5的上端还设置有过渡端盖13,在过渡端盖13底面与端盖5之间装有读取电机轴当前转动角度及位置的磁编码器,过渡端盖13上表面通过螺钉与机械臂第六轴固连。
31.谐波减速器10上的柔轮与无框电机壳体7固定连接,其波发生器与电机轴3通过键
槽连接,无框电机壳体的端面与柔轮端面通过螺钉紧固,起到防脱落的作用;输出轴11通过螺钉装在谐波减速器10的刚轮上,刚轮与输出轴11通过螺钉连接;在无框电机壳体7的下端面周向上设置有一圈螺钉安装孔,在谐波减速器10的壳体下端面周向上及绝缘固定套12上端面周向上均设置有相应的螺钉安装孔,螺钉穿过绝缘固定套12和谐波减速器10周向上的螺钉安装孔,最后旋入无框电机壳体7,使得绝缘杆固定套12、谐波减速器10和无框电机壳体7固连在一起。绝缘杆固定套12下方开设有内孔,在其侧面设置有切口,以方便绝缘外杆18安装,在切口的两个端面上均开设有两对螺纹孔,再绝缘外杆18安装在绝缘杆固定套12内时,通过两颗螺钉紧固抱紧。
32.如图2所示,绝缘组件2为两端对称结构,以一端为例,其包含销接紧固圈15、尼龙隔套14、操作杆转接头16、绝缘外杆18、绝缘内杆17、弹性销19以及对接件21。尼龙隔套14套设在绝缘内杆17外,并打胶固定;销接紧固圈15套设在绝缘内杆17外,绝缘内杆17的上端开设有内孔,操作杆转接头16末端压入绝缘内杆17上端的内孔内,在销接紧固圈15、操作杆转接头16和绝缘内杆17上均设置有相应的销孔,三者对正后压入一颗弹性销使三者固连。绝缘内杆17的另一端用同样方式装上尼龙隔套14,销接紧固圈15和操作杆转接头16。
33.绝缘外杆18为中空杆,将绝缘外杆18装入绝缘杆固定套12下方开设的的内孔中,如图5所示,在绝缘杆固定套12及绝缘外杆18侧面均开设有若干相应的销孔,通过在所述销孔内压入一颗弹性销19止转,并通过两颗螺钉紧固抱紧。绝缘内杆17从底下穿进绝缘外杆18内,其两端的尼龙隔套14抵在绝缘外杆18的内壁上,使绝缘内杆17在绝缘外杆18中保持同心。
34.如图3所示,对接件21上端套设在绝缘外杆18外,在绝缘外杆18下端侧面及对接件21侧面相应位置处开设有销孔,对接件21与绝缘外杆18通过对正销20穿入所述销孔止转,并通过两个螺钉抱紧。绝缘内杆17上端的操作杆转接头16前端开设有六方孔,输出轴11为六方轴,操作杆转接头16套设在输出轴11外,二者之间相互配合传输动力,如图6所示。同样的,如图4所示,绝缘内杆17下端的的操作杆转接头16前端也为六方孔,对接件21中的驱动转轴22也为六方轴,二者配合,绝缘内杆17将动力通过操作杆转接头16的六方孔与对接件21的驱动转轴22配合传输到工具上。
35.本实用新型的工作过程如下:
36.当机器人在斗臂车上进行空中带电作业时,机械臂带动绝缘杆运动到工具库,通过对接件抓取工具,抓取成功后运动到电缆作业区域,机器人发指令无框电机开始驱动电机轴3,电机轴3将动力通过谐波减速器10减速,并增加力矩,输出到输出轴11,输出轴11将动力通过六方结构的配合传输到绝缘内杆17,绝缘内杆17另一端同样通过六方结构将动力输出对接件21,进而将动力传输到工具,从而驱动工具进行剥线,夹线,断线等作业,作业完成后,无框电机反转,工具刀口或夹子打开,离开线缆,机器人收回手臂。
37.以上详细描述了本实用新型的优选实施方式,但是本实用新型并不限于上述实施方式中的具体细节,在本实用新型的技术构思范围内,可以对本实用新型的技术方案进行多种等同变换(如数量、形状、位置等),这些等同变换均属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1