一种关节气动锁紧型变刚度软体臂骨架结构
1.本实用新型涉及机器人领域,更具体地说,它涉及一种关节气动锁紧型变刚度软体臂骨架结构。
背景技术:
2.自第一台工业机器人问世以来,已经历了大半个世纪,刚体机器人研究体系已经十分成熟,且在工业方面,机器人的应用得到了全面的发展和推广。随着人类生活品质的提高,希望机器人不仅能在工业方面得到运用,在日常生活中也能有实际的运用。但由于目前刚体机器人的交互性不强,且驱动方式大多为电机驱动,运动时会产生较大的惯性,在与外界环境接触时不可避免的会发生刚性碰撞,产生一定的危险。我们希望机器人能够和人、环境进行直接交互。这类机器人能在康复、协助老人、人机协作等方面有广泛的运用。因此,近年来科学家设计了各种软体触手型机器或连续触手型机器人来解决这一问题。软体触手型机器人由柔性材料制作而成,软体触手型机器人可实现很多刚性机器人不能实现的运动,如卷曲、扭转、伸展、柔性接触等操作。正是由于软体机器人的高柔性与无限自由度的特点,是牺牲其自身刚度换来的。也正是因为软体机器人自身刚度不足的原因使得,其在日常生活中很难得到运用。如何有效且快速的提高软体机器人的刚度一直是一个热门话题。亟需一种允许软体机器人能够实现快速高效的改变自身刚度从而提高其交互性,扩展其运用领域。
3.本实用新型设计的变刚度骨架能实现快速高效的改变软体机器人在运动过程中的刚度。
4.中国专利公告号ccn107263525a,名称为一种可用于外骨骼及步行机器人的变刚度绳驱动关节,该申请案公开了一种可用于外骨骼及步行机器人的变刚度绳驱动关节,包括骨架、驱动盘、传力绳、驱动绳与刚度调节机构。其中,骨架包括上骨架与下骨架;两者间通过转动轴相连形成转动副;驱动盘同轴套接于转动轴上,两者间形成转动副;驱动盘上缠绕有一根传力绳与两根驱动绳;传力绳两端分别连接刚度调节机构,由刚度调节机构调节上骨架与下骨架间的驱动刚度;两根驱动绳反向缠绕,一端固定于驱动盘上,另一端连接驱动组件,由驱动组件驱动两根驱动绳带动驱动盘的转动,通过传力绳转变为驱动力,驱动上下骨架间的相互转动。该结构通过绳体改变关节强度,这会影响在低刚度下的软体机械臂的自由度,限定了其使用范围。
技术实现要素:
5.本实用新型克服了现在的软体臂型机器人在运动过程中刚度低下的不足,提供了关节气动锁紧型变刚度软体臂骨架,它能在未改刚度时对外部启动肌肉的运动影响可以忽略,在变刚度时不影响软体臂的实际运动状态。
6.为了解决上述技术问题,本实用新型采用以下技术方案:
7.一种关节气动锁紧型变刚度软体臂骨架结构,包括若干个铰接单元,相邻两个铰
接单元分别连接在一个万向节连接器上,所述铰接单元与万向节连接处之间设有锁紧模块,锁紧模块包括锁止环片和膨胀气囊;所述铰接单元包括两平行的主骨以及连接在两主骨间的交叉骨,交叉骨与主骨所夹夹角为锐角。
8.本实用新型为设置在软体机械臂内部的变刚度骨架。铰接单元设置在软体机械臂以内,通过万向节连接器连接。相邻铰接单元通过万向节连接器连接在一起,并设置单一铰接单元的长度较短,通过该方式,实现了未改刚度时对外部启动肌肉的运动影响可以忽略。当软体机械臂完成定位,需要其具有一定刚度以传递力时,锁紧模块工作,实现铰接单元与万向节之间的锁紧,通过若干个锁紧模块之间的配合,使得铰接单元之间维持当前的相对位置。由上文可知,铰接单元可能会承受来自各个方向的力矩和力,为了提高整体强度,设置了两主骨以及二者之间的交叉骨,该结构在各个方向均具有较高的强度。
9.作为优选,所述两主骨上均连接有交叉骨,交叉骨的尾部固定连接在另一主骨上,两交叉骨之间设有交叉夹角。铰接单元绕两主骨之间的平行轴线转动180度后与自身相同。本结构的优点在于对各个方向均具有较好的强度表现。对于具有无限自由度的软体机械臂可能会呈现的姿态均具有较好的强度表现。
10.作为优选,主骨的两端部均设有铰接套环,两主骨同一方向的铰接套环同轴,主骨两端的两铰接套环的轴线垂直。通过该结构,相邻的两铰接单元转动范围也垂直,该结构提高了装置整体的自由度。
11.作为优选,万向节连接器为呈正方形的十字轴环,万向节连接器各个侧壁的芯部设有连接孔,相对的连接孔同轴,相邻的连接孔垂直。相邻的两铰接单元通过万向节连接器连接。十字轴环的侧壁具有与锁止模块对应的圆形凹槽。
12.作为优选,膨胀气囊包括膨胀端和连接端,连接端插装在连接孔上,膨胀端的膨胀方向为径向方向,膨胀气囊插装在锁止环片内。自由端与连接孔过盈配合。锁止环片与铰接套环间隙配合,可以相对转动。铰接模块与锁止模块在低刚度下是可以相对转动的,在高刚度下向,膨胀端膨胀,将锁止环片抵接在铰接套环上,实现过盈配合,由此实现铰接单元与万向节连接器之间的相对固定。
13.作为优选,锁止环片经紧固件固定连接在万向节连接器上,锁止环片对应膨胀端的膨胀方向设有活动片。锁止片除了整体在径向方向刚度不高之外还可以设置在非膨胀的径向方向为刚度较高,在膨胀方向设置一个刚度较小的簧片,通过该簧片抵接在所持环片内壁上。
14.作为优选,铰接单元一体成型。铰接单元通过3d打印机一体成型。
15.作为优选,膨胀气囊的材质为硅胶。
16.一种内部嵌有关节气动锁紧型变刚度软体臂骨架结构的软体臂形机器人。
17.与现有技术相比,本实用新型的有益效果是:
18.(1)本实用新型的关节气动锁紧型变刚度软体臂骨架结构将锁紧模块和万向节连接器组合,具有可变刚度能力,实现在软体臂内部的跟随运动,可内嵌在软体机器人内部,在不影响软体臂的运动下,能跟随软体臂实现共同运动;
19.(2)根据软体臂的长度可调节铰接单元和万向节连接器个数,以达到软体臂型机器人原始长度一致,提高适配性;
20.(3)本实用新型的关节气动锁紧型变刚度软体臂骨架结构可内嵌在软体臂形机器
人内部,能实现快速高效的改变软体臂形机器人在运动过程中的刚度。
附图说明
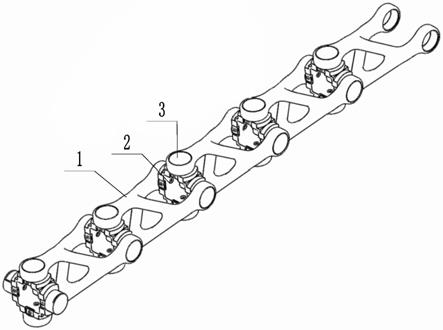
21.图1是本实用新型的变刚度骨架整体结构图;
22.图2是本实用新型的铰接单元示意图;
23.图3是本实用新型的万向节连接器示意图;
24.图4是本实用新型的锁止环片示意图;
25.图5是本实用新型的万向节连接器与锁紧模块的爆炸图;
26.图中:
27.铰接单元1、万向节连接器2、膨胀气囊3、锁止环片4、主骨5、交叉骨6、铰接套环7、连接孔8、膨胀端9、连接端10、活动片11。
具体实施方式
28.下面结合附图与实施例对本公开作进一步说明。
29.应该指出,以下详细说明都是例示性的,旨在对本技术提供进一步的说明。除非另有指明,本文使用的所有技术和科学术语具有与本技术所属技术领域的普通技术人员通常理解的相同含义。
30.需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本技术的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
31.在本公开中,术语如“上”、“下”、“左”、“右”、“前”、“后”、“竖直”、“水平”、“侧”、“底”等指示的方位或位置关系为基于附图所示的方位或位置关系,只是为了便于叙述本公开各部件或元件结构关系而确定的关系词,并非特指本公开中任一部件或元件,不能理解为对本公开的限制。
32.本公开中,术语如“固接”、“相连”、“连接”等应做广义理解,表示可以是固定连接,也可以是一体地连接或可拆卸连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的相关科研或技术人员,可以根据具体情况确定上述术语在本公开中的具体含义,不能理解为对本公开的限制。
33.实施例:
34.一种关节气动锁紧型变刚度软体臂骨架结构,如图1、5所示,包括若干个铰接单元1,相邻两个铰接单元1分别连接在一个万向节连接器2上,万向节连接器2为呈正方形的十字轴环,万向节连接器2各个侧壁的芯部设有连接孔8,相对的连接孔8同轴,相邻的连接孔8垂直。相邻的两铰接单元1通过万向节连接器2连接。十字轴环的侧壁具有与锁止模块对应的圆形凹槽。所述铰接单元1与万向节连接处之间设有锁紧模块。
35.如图3、4所示,锁紧模块包括锁止环片4和膨胀气囊3。膨胀气囊3包括膨胀端9和连接端10,连接端10插装在连接孔8上,膨胀端9的膨胀方向为径向方向,膨胀气囊3插装在锁止环片4内。自由端与连接孔8过盈配合。锁止环片4与铰接套环7间隙配合,可以相对转动。铰接模块与锁止模块在低刚度下是可以相对转动的,在高刚度下向,膨胀端9膨胀,将锁止
环片4抵接在铰接套环7上,实现过盈配合,由此实现铰接单元1与万向节连接器2之间的相对固定。锁止环片4经紧固件固定连接在万向节连接器2上,锁止环片4对应膨胀端9的膨胀方向设有活动片11。锁止片除了整体在径向方向刚度不高之外还可以设置在非膨胀的径向方向为刚度较高,在膨胀方向设置一个刚度较小的簧片,通过该簧片抵接在所持环片内壁上。膨胀气囊3的材质为硅胶。膨胀气囊与相接气管连接,气管为其供气。
36.如图2所示,所述铰接单元1包括两平行的主骨5以及连接在两主骨5间的交叉骨6。所述两主骨5上均连接有交叉骨6,交叉骨6的尾部固定连接在另一主骨5上,两交叉骨6之间设有交叉夹角,交叉骨与主骨所夹夹角为锐角。铰接单元1绕两主骨5之间的平行轴线转动180度后与自身相同。本结构的优点在于对各个方向均具有较好的强度表现。对于具有无限自由度的软体机械臂可能会呈现的姿态均具有较好的强度表现。主骨5的两端部均设有铰接套环7,两主骨5同一方向的铰接套环7同轴,主骨5两端的两铰接套环7的轴线垂直。通过该结构,相邻的两铰接单元1转动范围也垂直,该结构提高了装置整体的自由度。铰接单元1一体成型。铰接单元1通过3d打印机一体成型。交叉骨6与两主骨5所夹夹角相同。本结构可以进一步的增大铰接单元1的强度。
37.本实用新型的锁止的原理为:
38.固定连接在万向节连接器2上的膨胀气囊3膨胀,其膨胀端9沿径向方向膨胀,抵接在固定连接在万向节连接器2上的锁止环片4上,锁止环片4与外围的铰接套环7产生摩擦锁紧,进而改变骨架关节的刚度。通过一铰接单元1、一万向节连接器2的连接方式,可根据软体臂的长度不断的,增加关节单元和万向节连接模块个数从而增加骨架长度,以达到软体臂型机器人的期望长度。
39.本实用新型为设置在软体机械臂内部的变刚度骨架。铰接单元1设置在软体机械臂以内,通过万向节连接器2连接。相邻铰接单元1通过万向节连接器2连接在一起,并设置单一铰接单元1的长度较短,通过该方式,实现了未改刚度时对外部启动肌肉的运动影响可以忽略。当软体机械臂完成定位,需要其具有一定刚度以传递力时,锁紧模块工作,实现铰接单元1与万向节之间的锁紧,通过若干个锁紧模块之间的配合,使得铰接单元1之间维持当前的相对位置。由上文可知,铰接单元1可能会承受来自各个方向的力矩和力,为了提高整体强度,设置了两主骨5以及二者之间的交叉骨6,该结构在各个方向均具有较高的强度。
40.以上所述的实施例只是本实用新型的较佳的方案,并非对本实用新型作任何形式上的限制,在不超出权利要求所记载的技术方案的前提下还有其它的变体及改型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1