位置检测系统及位置检测方法与流程
1.本发明涉及检测第1通信器及第2通信器的位置关系的位置检测系统及位置检测方法。
背景技术:
2.以往,公知如下位置检测系统:在终端及其操作对象之间进行电波的通信,测定这些之间的距离,对测定的距离的正确与否进行判定(参照专利文献1等)。位置检测系统例如在求出以终端及其操作对象之间的距离为准的测定值时,在判定为该测定值不足阈值的情况下,例如在两者间容许通过无线执行的id校验的成立。由此,即使尝试将远离操作对象的终端用中继器等连接的非法通信,也只要对其进行检测,不使id校验非法转移到成立即可。现有技术文献专利文献
3.专利文献1:日本特开2014
‑
227647号公报
技术实现要素:
发明要解决的课题
4.在这种位置检测系统中,期望非法通信的检测的精度进一步提高。
5.本发明的目的在于提供能够提高非法通信的检测精度的位置检测系统及位置检测方法。用于解决课题的方案
6.一实施方式的位置检测系统,其中,具备测定部,所述测定部每当检测出第1通信器及第2通信器的位置关系时,求出从所述第1通信器及所述第2通信器中的一方通信器朝向另一方通信器发送电波,直至在该一方通信器收到所述电波的响应为止的、涉及所述电波的收发的测定值,所述测定部通过将求出所述测定值的通信以改变该通信的参数的方式执行多次,从而求出多个所述测定值。
7.一实施方式的位置检测方法,其中,每当检测第1通信器及第2通信器的位置关系时,通过测定部求出从所述第1通信器及所述第2通信器中的一方通信器朝向另一方通信器发送电波,直至在该一方通信器收到所述电波的响应为止的、涉及所述电波的收发的测定值,所述位置检测方法具备:通过由所述测定部将求出所述测定值的通信以由所述测定部改变通信的参数的方式执行多次,从而求出多个所述测定值。
附图说明
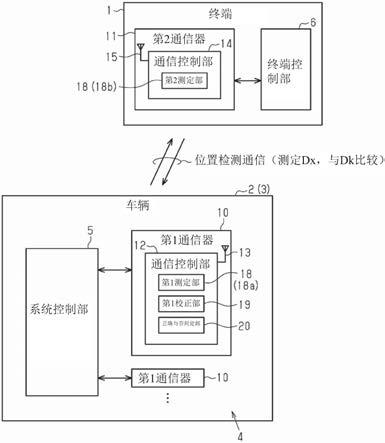
8.图1是第1实施方式的位置检测系统的结构图。图2是位置检测通信的时序图。图3是在第2通信器中产生时钟误差的情况下的通信时序图。图4是使用中继器的非法通信的通信时序图。
图5是第2实施方式的位置检测通信的时序图。图6是另一例的通信时序图。
具体实施方式
9.(第1实施方式)以下,按照图1~图4说明位置检测系统及位置检测方法的第1实施方式。
10.如图1所示,作为终端1的操作对象2的车辆3具备位置检测系统4,位置检测系统4通过与终端1的通信而检测车辆3及终端1之间的位置关系。本例的位置检测系统4通过车辆3及终端1之间的位置检测通信而测定两者间的距离,基于该测定值dx判定相互的位置关系。在车辆3上搭载位置检测系统4是为了防止如下:将位于远离车辆3的场所的终端1用例如中继器等非法连接到车辆3而非法通信。
11.车辆3具备管理车辆3的动作的系统控制部5。系统控制部5由例如cpu、rom及ram等各种设备构建。位置检测系统4通过系统控制部5控制动作。另外,本例的系统控制部5也可以控制例如车辆3的电子钥匙系统的动作。在电子钥匙系统中,例如在作为终端1的电子钥匙与车辆3之间通过基于无线的通信而进行钥匙id的校验,在该id校验成立的情况下,许可或者执行所车载的门锁装置、发动机装置的动作。
12.终端1具备控制终端1的动作的终端控制部6。终端控制部6例如在终端1是电子钥匙的情况下,执行与系统控制部5之间通过无线对登记于自身的存储器中的钥匙id的正确与否进行认证的id校验。
13.位置检测系统4具备第1通信器10和第2通信器11,第1通信器10在车辆3中执行位置检测的动作,第2通信器11在终端1中执行位置检测的动作。第1通信器10以无论终端1的第2通信器11位于车辆3的哪个位置都确立位置检测通信的方式在车身设置有多个。第1通信器10及第2通信器11例如收发uwb(ultra wide band:超宽带)的电波,测定两者间的位置。在本例的情况下,第1通信器10是成为位置检测通信之主的锚,第2通信器11是成为位置检测通信的从属的附属物。当测距通信的电波使用uwb电波时,能够以高分辨率测定第1通信器10及第2通信器11之间的距离。
14.第1通信器10具备控制测距通信的动作的通信控制部12和收发uwb电波的天线13。通信控制部12在存储器等中写入保存有第1通信器固有id(省略图示)作为各个第1通信器10的固有的id信息。第1通信器10例如通过有线与系统控制部5连接。
15.第2通信器11具备控制测距通信的动作的通信控制部14和收发uwb电波的天线15。通信控制部14在存储器等写入保存有第2通信器固有id(省略图示)作为第2通信器11的固有的id信息。第2通信器11与终端控制部6连接,通过终端控制部6控制动作。
16.位置检测系统4具备测定部18,测定部18求出以第1通信器10及第2通信器11的位置关系为准的测定值dx。本例的测定部18具备设置于第1通信器10的通信控制部12的第1测定部18a和设置于第2通信器11的通信控制部14的第2测定部18b。测定部18当检测第1通信器10及第2通信器11的位置关系时,求出从第1通信器10及第2通信器11的一方朝向另一方发送作为用于测距的电波的uwb电波,直至收到该电波的响应为止的涉及电波的收发的测定值dx。另外,本例的测定部18通过将求出测定值dx的通信以改变通信的参数pt的方式执行多次,从而求出多个测定值dx。本例的参数pt是在第2通信器11从第1通信器10接收电波
并作出针对其的响应之前在第2通信器11中需要的处理时间。
17.位置检测系统4具备校正部19,校正部19校正由测定部18求出的测定值dx。本例的校正部19设置于第1通信器10的通信控制部12。本例的校正部19基于从第1通信器10及第2通信器11的一方向另一方发送的电波和应发送的理想波,求出第1通信器10及第2通信器11的至少一方通信器的以时钟误差为主要原因的偏差量δk。偏差量δk能够设为例如所发送的uwb电波的频率误差δf。另外,理想波能够设为在没有产生时钟误差的情况下所发送的电波。并且,校正部19基于该偏差量δk校正测定值dx。
18.位置检测系统4具备正确与否判定部20,正确与否判定部20基于测定值dx判定第1通信器10及第2通信器11的位置关系的正确与否。正确与否判定部20设置于第1通信器10的通信控制部12。本例的正确与否判定部20基于由校正部19校正的测定值dx,判定第1通信器10及第2通信器11的位置关系的正确与否。正确与否判定部20通过比较测定值dx和阈值dk,从而判定位置关系的正确与否,在测定值dx不足阈值dk的情况下,将位置关系判定为“正确”,在测定值dx成为阈值dk以上的情况下,将位置关系判定为“否”。以上的位置检测通信及位置关系判定的一系列处理在各个第1通信器10与第2通信器11之间分别被执行。
19.接着,使用图2~图4对本实施方式的位置检测系统4的作用及效果进行说明。
20.如图2所示,第1通信器10的第1测定部18a通过以通知自身为主开始测距通信的意思的uwb电波的方式将第1次测距要求(以后记载为第1测距要求sreq1)从天线13发送。第1测距要求sreq1例如是包括应开始测距的指令的uwb电波。另外,第1测定部18a使用例如设置于通信控制部12的cpu的计时器等,存储作为发送第1测距要求sreq1时的时刻的发送时刻ta1。
21.第2通信器11的第2测定部18b当由天线15接收从第1通信器10发送的第1测距要求sreq1时,以针对第1测距要求sreq1的应答的uwb电波的方式将第1测距应答srep1从天线15发送。第1测距应答srep1例如是包括通知已正确接收第1测距要求sreq1的信息在内的电波。第2测定部18b在接收第1测距要求sreq1之后经过涉及响应处理的动作的时间(以后记载为响应处理时间t2)后,将第1测距应答srep1向第1通信器10发送。响应处理时间t2被设定为预先设定的固有的时间长度。
22.第1测定部18a当由天线13接收从第2通信器11发送的第1测距应答srep1时,使用例如设置于第1通信器10的cpu的计时器等,确认作为接收到第1测距应答srep1时的时刻的接收时刻ta2。在此,第1测定部18a预先掌握响应处理时间的“t2”。因此,第1测定部18a算出作为从发送时刻ta1到接收时刻ta2为止的经过时间的“t1”,使用已经掌握的响应处理时间t2,算出作为uwb电波的传播时间的“tp1”作为测定值dx(例如第1测定值)。在本例的情况下,传播时间tp1通过从t1减去t2(tp1=t1
‑
t2)而算出。
23.在此,假设如下情况:如图3所示,例如第2通信器11的cpu的时钟误差是主要原因,响应处理时间t2比事先决定的值缩短误差时间δt。在该情况下,经过时间t1也缩短误差时间δt。因此,使用由第1测定部18a预先掌握的响应处理时间t2算出的传播时间tp1成为“(t1
‑
δt)
‑
t2=tp1
‑
δt”,传播时间tp1被算出为比正规的值缩短误差时间δt。因此,在进行使用中继器的通信的情况下,有不能检测非法通信的可能性。
24.在此基础上,传播时间tp1由校正部19校正。在本例的情况下,校正部19求出从第2通信器11实际接收的第1测距应答srep1和预先掌握的第1测距应答srep1的理想波的频率
的差分,测定该差分即频率误差δf作为偏差量δk。
25.在此,例如在将第1测距应答srep1的频率设为“f”的情况下,“f+δf”和“t2
‑
δt”具有成反比的关系。因此,校正部19通过测定频率误差δf而能够掌握误差时间δt,所以使用该频率误差δf来校正传播时间tp1。这样,能够求出不受第2通信器11的时钟误差的影响的正确的传播时间tp1。
26.返回图2,测定部18将从第1通信器10向第2通信器11发送的电波由第2通信器11响应时需要的响应处理时间从t2变为t4,再一次执行求出测定值dx的通信。在本例的情况下,首先,第1测定部18a将第2次测距要求(以后记载为第2测距要求sreq2)从天线13再次发送。第1测定部18a使用例如设置于通信控制部12的cpu的计时器等,存储作为发送第2测距要求sreq2时的时刻的发送时刻ta3。
27.第2通信器11的第2测定部18b当由天线15接收从第1通信器10发送的第2测距要求sreq2时,以针对第2测距要求sreq2的应答的uwb电波的方式将第2测距应答srep2从天线15发送。此时,第2测定部18b在经过与发送第1测距应答srep1时不同的时间(以后记载为响应处理时间t4)后,将第2测距应答srep2向第1通信器10发送。响应处理时间t4能够设为例如响应处理时间t2的2倍等。
28.另外,从第1通信器10向第2通信器11的响应处理时间t4的通知也可以在例如位置检测通信的过程中通知。例如,通过使涉及响应处理时间t4的信息以包含于第1测距要求sreq1、第2测距要求sreq2的方式发送,从而通知第2测距应答srep2的发送时机。另外,也可以利用电子钥匙系统的通信网,在例如智能通信的过程中将响应处理时间t4向对方通知。而且,响应处理时间t4也可以设为预先决定的固定值。
29.第1测定部18a当由天线13接收从第2通信器11发送的第2测距应答srep2时,使用例如设置于第1通信器10的cpu的计时器等,确认作为接收第2测距应答srep2时的时刻的接收时刻ta4。在此,第1测定部18a预先掌握响应处理时间的“t4”。因此,第1测定部18a算出作为从发送时刻ta3到接收时刻ta4的经过时间的“t3”,使用已经掌握的响应处理时间t4算出作为uwb电波的传播时间的“tp2”,将其作为测定值dx(例如第2测定值)。在本例的情况下,传播时间tp2通过从t3减去t4(tp2=t3
‑
t4)而算出。
30.在此,假设如下情况:例如第1通信器10的cpu的时钟误差是主要原因,响应处理时间t4比事先决定的值缩短误差时间δt。在该情况下,经过时间t3也缩短误差时间δt。因此,使用由第1测定部18a预先掌握的响应处理时间t4算出的传播时间tp2成为“(t3
‑
δt)
‑
t4=tp2
‑
δt”,传播时间tp2被算出为比正规值短误差时间δt。因此,在进行使用中继器的通信的情况下,有不能检测非法通信的可能性。
31.在此基础上,传播时间tp2由校正部19校正。该校正是与校正传播时间tp1时同样的处理,所以省略详情。这样,能够求出不受第2通信器11的时钟误差的影响的正确的传播时间tp2。
32.正确与否判定部20基于作为由校正部19校正的测定值dx的传播时间tp1、tp2来判定通信的正确与否。此时,正确与否判定部20进行比较传播时间tp1、tp2和阈值dk的处理,在这些传播时间tp1、tp2中至少一方成为阈值dk以上的情况下,将第1通信器10及第2通信器11的位置关系判定为不正确。由此,即使例如使用中继器等非法尝试通信,也只要将此时的通信判定为非法通信,不转移到确立即可。
33.但是,如图4所示,例如在交换第1测距要求sreq1及第1测距应答srep1的第1次通信中尝试使用中继器的非法通信,第1测距应答srep1的频率被改变变换值“δf
’”
时,则变为稍微低的频率“f+δf
‑
δf
’”
。此时,第1通信器10将响应处理时间t2用“t2
‑
δt+δt
’”
的稍长的值识别。因此,所测定的传播时间tp1被算出为较短,有使用中继器的非法通信成立的可能性。
34.在此,即使是进行了从第2通信器11向第1通信器10发送的第1测距应答srep1被频率变换的非法通信的情况,但是将t4设为t2的“2倍”时,则在第2测距应答srep2响应时,若δf’为原样,则δt’变为约2倍。因此,作为第1次测定值的传播时间tp1和作为第2次测距值的传播时间tp2取不同的值,两者的值产生不匹配。因此,当确认这些传播时间tp1、tp2的一致性时,能够针对从第2通信器11向第1通信器10发送的第1测距应答srep1被频率变换的攻击进行应对。
35.正确与否判定部20在传播时间tp1、tp2取得一致或者近似值的情况下,当传播时间tp1、tp2均成为阈值dk以下时,将第1通信器10及第2通信器11的位置关系判定为“正确”。因此,例如在车辆3及终端1之间将终端1设为电子钥匙的基于无线的id校验成立的情况下,该id成立有效地转移。因此,车辆3的车门的上锁/解锁操作被执行或者许可,或者车辆3的发动机启动操作被许可。
36.另一方面,正确与否判定部20在传播时间tp1、tp2未取得一致或者近似值的情况下,不管传播时间tp1、tp2和阈值dk的比较结果如何,都将第1通信器10及第2通信器11的位置关系判定为“否”。因此,即使进行从第2通信器11向第1通信器10发送的第1测距应答srep1被频率变换的攻击,也只要将此时的通信判定为非法通信,不转移到确立即可。因此,能够提高位置检测通信的安全性。
37.第1实施方式特别是具有以下优点。
38.因为在第1通信器10及第2通信器11的通信中,即使进行例如通过中继器进行频率变换而非法连接的行为,也能够在改变通信的参数pt而执行多次的通信中的任一通信中确认不匹配。在本例中,参数pt是从测距要求的接收到测距应答的响应为止需要的响应处理时间,从第1参数(响应处理时间t2)变更为第2参数(响应处理时间t4)。因此,能够检测出伴随如上述的使用中继器的频率变换的非法通信。因此,能够提高非法通信的检测精度。
39.第1测定部18a及第2测定部18b测定电波的传播时间tp1、tp2,将其作为不同的测定值dx。因此,能够根据在第1通信器10及第2通信器11间的通信中所测定的电波的传播时间tp1、tp2精度良好地检测位置关系。
40.在位置检测系统4设置校正部19,作为第1通信器10及第2通信器11各自中的时钟误差为主要原因的偏差量δk,求出频率误差δf,基于该频率误差δf校正测定值dx。因此,能够使测定值dx最佳化,所以进一步有利于检测位置关系时的精度提高。
41.在位置检测系统4设置正确与否判定部20,基于由校正部19校正的测定值dx,判定第1通信器10及第2通信器11的位置关系的正确与否。因此,能够基于校正后的测定值dx判定位置关系的正确与否,所以能够精度良好地进行位置正确与否的判定。
42.测定部18将从第1通信器10及第2通信器11的一方发送的电波由另一方接收且直至进行针对其的响应为止所需要的响应处理时间从t2变为t4,将求出测定值dx的通信执行多次。因此,通过仅改变作为参数pt的响应处理时间t2、t4,能够将在第1通信器10及第2通
信器11之间收发电波的通信进行多次。因此,能够通过简便的手法将非法通信的检测精度设为高精度。
43.(第2实施方式)接着,按照图5说明第2实施方式。另外,第2实施方式是针对第1实施方式将位置关系的判定手法变更的实施例。因此,对与第1实施方式相同的部分标注相同符号并省略详细说明,仅对不同的部分详述。
44.如图5所示,第1通信器10的第1测定部18a以通知自身为主开始测距通信的意思的uwb电波的方式将测距要求sreq从天线13发送。测距要求sreq例如是包括应开始测距的指令的uwb电波。另外,第1测定部18a使用例如设置于通信控制部12的cpu的计时器等,存储作为发送测距要求sreq时的时刻的发送时刻ta1。
45.第2通信器11的第2测定部18b当由天线15接收从第1通信器10发送的测距要求sreq时,以针对该测距要求sreq的应答的uwb电波的方式将第1测距应答srep1从天线15发送。第2测定部18b在接收测距要求sreq之后经过涉及响应处理的动作的时间(响应处理时间t2)后,将第1测距应答srep1向第1通信器10发送。
46.第1测定部18a当由天线13接收从第2通信器11发送的第1测距应答srep1时,使用例如设置于第1通信器10的cpu的计时器等,确认作为接收到第1测距应答srep1时的时刻的接收时刻ta2。并且,第1测定部18a算出作为从发送时刻ta1到接收时刻ta2的经过时间的“t1”,使用已经掌握的响应处理时间t2,算出作为uwb电波的传播时间的“tp1(=t1
‑
t2)”。
47.本例的测定部18通过在第1通信器10及第2通信器11的一方接收所述电波并使其向另一方响应的情况下将该响应执行多次,从而取得多个测定值dx。在本例的情况下,第2测定部18b在一次通信中将测距应答的响应进行多次(本例为两次)。由此,测定部18在一次通信中取得两个测定值dx。
48.在本例的情况下,第2通信器11的第2测定部18b在第1测距应答srep1发送后经过规定时间(以后记载为响应处理时间t4)后,将第2测距应答srep2向第1通信器10发送。本例的响应处理时间t4能够设为例如响应处理时间t2的2倍等。
49.第1测定部18a当由天线13接收从第2通信器11发送的第2测距应答srep2时,使用例如设置于第1通信器10的cpu的计时器等,确认作为接收到第2测距应答srep2时的时刻的接收时刻ta4。在此,第1测定部18a预先掌握响应处理时间的“t4”。因此,第1测定部18a算出作为从发送时刻ta1到接收时刻ta4的经过时间的“t3”,使用已经掌握的响应处理时间t4,算出作为uwb电波的传播时间的“tp2”。传播时间tp2通过从t3减去t4即(tp2=t3
‑
t4)而算出。
50.在此,在进行了从第2通信器11向第1通信器10发送的第1测距应答srep1被频率变换的非法通信的情况下,当将t4设为t2的“2倍”时,在第2测距应答srep2响应时,若δf’为原样,则δt’变为约2倍。因此,作为第1次测定值的传播时间tp1和作为第2次测距值的传播时间tp2取不同的值,两者的值产生不匹配。因此,当确认这些传播时间tp1、tp2的一致性时,能够检测出从第2通信器11向第1通信器10发送的第1测距应答srep1被频率变换的攻击。
51.第2实施方式除了第1实施方式的优点之外还具有以下优点。
52.测定部18在从第1通信器10及第2通信器11的一方发送的电波由另一方接收并进
行针对其的响应的情况下执行多次响应,从而取得多个测定值dx。因此,通过仅将响应执行多次即可的手法,能够检测非法通信,所以能够将通信需要的电力抑制得少,并且能够提高非法通信的检测精度。
53.另外,上述各实施方式能够按如下变更而实施。上述各实施方式及以下变更例能够在技术上不矛盾的范围内相互组合而实施。
54.[关于测定部18]
·
如图6所示,也可以在使uwb电波在第1通信器10及第2通信器11之间往复后,将uwb电波再一次向对方侧发送,由该一系列通信求出测定值dx。这样,在将通信设为3消息方式的情况下,进一步有利于精度更好地进行位置检测的判定。
[0055]
·
在各实施方式中,第1测定部18a不限于设置于第1通信器10,例如也可以设置于系统控制部5、车载的其他构件。
[0056]
·
在各实施方式中,第2测定部18b不限于设置于第2通信器11,也可以设置于例如终端控制部6、搭载于终端1的其他构件。
[0057]
·
在各实施方式中,测定部18也可以仅设置于终端1及车辆3的一方。
[0058]
[关于测定值dx]
·
在各实施方式中,测定值dx不限于传播时间tp1、tp2,也可以是例如接收电波时的接收信号强度。
[0059]
·
在各实施方式中,测定值dx不限于传播时间tp1、tp2,只要是能够确认位置关系的参数即可。
[0060]
[关于参数pt]
·
在各实施方式中,作为参数pt的响应处理时间t2、t4在切换时间的情况下,能够设定成各种时间。
[0061]
·
在各实施方式中,响应处理时间t4不限于响应处理时间t2的2倍,也可以设定为其他值。
[0062]
·
在各实施方式中,参数pt不限于时间,只要是涉及通信的参数即可。
[0063]
[关于将通信执行多次]
·
在各实施方式中,所谓将通信执行多次只要是将通信的参数改变而进行多次的通信即可。
[0064]
·
在各实施方式中,在将通信执行多次的情况下,也可以例如将参数的种类改变而执行多次。
[0065]
·
在各实施方式中,在将通信执行多次的情况下,该次数不限于两次,也可以设为三次以上。
[0066]
[关于第1通信器10]
·
在各实施方式中,第1通信器10也可以设为装入到系统控制部5的结构。
[0067]
·
在各实施方式中,第1通信器10也可以后安装于车辆3。
[0068]
·
在各实施方式中,第1通信器10不限于设置于车辆3,也可以搭载于种种装置、机器。
[0069]
[关于第2通信器11]
·
在各实施方式中,第2通信器11也可以设为装入到终端1的终端控制部6的结构。
[0070]
·
在各实施方式中,第2通信器11也可以预先搭载于高性能便携电话。
[0071]
[关于正确与否判定部20]
·
在各实施方式中,正确与否判定部20设置于例如终端1。
[0072]
·
在各实施方式中,正确与否判定部20也可以设置于系统控制部5、终端控制部6。
[0073]
[关于校正部19]
·
在各实施方式中,校正部19不限于根据电波的频率偏差来检测误差,也能够使用频率以外的参数来检测误差。
[0074]
·
在各实施方式中,偏差量δk不限于频率误差δf,也可以设为其他的参数。
[0075]
·
在各实施方式中,也可以从位置检测系统4省略校正部19。
[0076]
[关于位置检测系统4]
·
在各实施方式中,也可以将正确与否判定部20设置于终端1,并由终端1判定测定值的妥当性。
[0077]
0在各实施方式中,也可以从第2通信器11向第1通信器10发送电波而进行位置检测。
[0078]
·
在各实施方式中,位置检测系统4在多个第1通信器10搭载于车身的情况下,优选与各第1通信器10分别通信,测定距离。在该情况下,优选通过确认这些各距离而判定位置关系是否妥当。
[0079]
·
在各实施方式中,位置测定不限于使用uwb通信的形式,也可以是例如使用蓝牙(bluetooth:注册商标)的形式。在该情况下,也可以按用蓝牙通信所发送的电波的每个信道测定电波的接收信号强度,并根据这些接收信号强度来判定两者间的位置关系。
[0080]
·
在各实施方式中,位置检测通信不限于在与智能通信不同的时机实施,也可以同时。
[0081]
·
在各实施方式中也可以为,位置检测通信根据例如仅从第1通信器10及第2通信器11的一方发送uwb电波并被物体反射而返回到发送源的uwb电波的传播时间来测定位置。
[0082]
·
在各实施方式中,位置关系的判定手法在使用uwb通信的电波的方式的情况下,有例如根据电波的收发需要的时间推定位置关系的方式、根据电波的到来方向推定位置关系的方式等。另外,在使用蓝牙通信的电波的方式的情况下,有例如根据传播特性推定位置关系的方式、根据电波的接收信号强度推定位置关系的方式、根据电波的收发所需要的时间推定位置关系的方式、根据电波的到来方向推定位置关系的方式、使用阵列天线的方式等。
[0083]
·
在各实施方式中,也可以将多个第1通信器10中特定的一个设为主定位,将其他的多个设为从属定位。在该情况下,从属定位的第1通信器10也可以采取通过主定位的第1通信器10而与系统控制部5进行通信的动作。
[0084]
[关于电子钥匙系统]
·
在各实施方式中,电子钥匙系统无论是智能校验系统、无线钥匙系统、发动机防盗锁止系统中的哪个都可以。
[0085]
·
在各实施方式中,在电子钥匙系统中使用的电波的频率不限于lf(low frequency:低频)带、uhf(ultra high frequency:超高频)带,也可以使用其他的频率。
[0086]
·
在各实施方式中,电子钥匙系统也可以是例如蓝牙(bluetooth:注册商标)、
rfid(radio frequency identification:射频识别)等近距离无线通信、使用红外线等的通信。
[0087]
·
在各实施方式中,电子钥匙系统也可以设为位置检测系统4共用的结构。在该情况下,在uwb通信中进行终端1的校验,并且也实施位置检测的通信及判定。
[0088]
[其他]
·
在各实施方式中,终端1不限于电子钥匙、高性能便携电话,只要是能够成为操作对象2的钥匙的终端即可。
[0089]
·
在各实施方式中,操作对象2不限于车辆3,能适用种种装置、机器。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1