折叠装置以及折叠系统的制作方法
1.本公开涉及折叠装置以及折叠系统。
背景技术:
2.过去一直推广由人的手工作业进行的作业的机械化。例如,专利文献1公开折叠扁平带状线缆的装置。在上述装置中,一端被固定的扁平带状线缆的另一个端部由操作装置引导至折叠后的位置,辊状的折压装置使扁平带状线缆所产生的环部平坦化。
3.专利文献1:日本特开2003-31056号公报
4.专利文献1的装置为了在扁平带状线缆形成一个折痕,由操作装置进行扁平带状线缆的端部的移动,且由折压装置进行扁平带状线缆的环部的平坦化。而且,操作装置以及折压装置是相互分离的装置。因此,在专利文献1中,用于折叠扁平带状线缆的结构复杂。
技术实现要素:
5.因此,本公开的目的在于提供能够简化用于折叠对象物的结构的折叠装置以及折叠系统。
6.为了实现上述目的,本公开的一方式所涉及的折叠装置是折叠细长的对象物的折叠装置,具备:折弯部,其折弯上述对象物;和移动部,其使上述折弯部移动,上述移动部构成为使折弯了上述对象物的上述折弯部沿将折弯的上述对象物折叠的方向亦即第1方向移动。
7.本公开的一方式所涉及的折叠系统具备:本公开的一方式所涉及的折叠装置;和保持部,其保持上述对象物,上述保持部具有:第1卡定部,其配置在上述保持部上并且卡定上述对象物的一端;第2卡定部,其配置在上述保持部上并且卡定上述对象物的另一端;解除装置,其将上述对象物的上述一端相对于上述第1卡定部的卡定解除;以及位移装置,其使上述第1卡定部向接近上述第2卡定部的方向以及远离上述第2卡定部的方向位移。
8.根据本公开的技术,能够简化用于折叠对象物的结构。
附图说明
9.图1是表示实施方式所涉及的折叠系统的结构的一个例子的俯视图。
10.图2是表示实施方式所涉及的折叠系统的结构的一个例子的侧视图。
11.图3是表示实施方式所涉及的夹具的结构的一个例子的俯视图。
12.图4是表示沿着图3的iv-iv线的剖视侧视图。
13.图5是表示实施方式所涉及的机器人的结构的一个例子的侧视图。
14.图6是表示从侧方观察实施方式所涉及的第1末端执行器的结构的一个例子的图。
15.图7是表示从下方观察实施方式所涉及的第1末端执行器的结构的一个例子的图。
16.图8是表示实施方式所涉及的折叠系统的结构的一个例子的框图。
17.图9是表示实施方式所涉及的控制装置的功能结构的一个例子的框图。
18.图10是表示实施方式所涉及的折叠系统的动作的一个例子的流程图。
19.图11是表示实施方式所涉及的折叠系统的动作期间的夹具上的带的状态的一个例子的俯视图。
20.图12是表示实施方式所涉及的折叠系统的动作期间的夹具上的带的状态的一个例子的俯视图。
21.图13是表示实施方式所涉及的折叠系统的动作期间的夹具上的带的状态的一个例子的俯视图。
22.图14是表示实施方式所涉及的折叠系统的动作期间的夹具上的带的状态的一个例子的俯视图。
23.图15是表示实施方式所涉及的折叠系统的动作期间的夹具上的带的状态的一个例子的俯视图。
24.图16是表示实施方式所涉及的折叠系统的动作期间的夹具上的带的状态的一个例子的俯视图。
具体实施方式
25.以下,参照附图对本公开的实施方式进行说明。此外,以下说明的实施方式均表示概括的或者具体的例子。另外,以下的实施方式中的结构要素中的关于表示最上位概念的独立权利要求中没有记载的结构要素,作为任意的结构要素进行说明。另外,附图中的各图是示意性的图,不一定严格地图示。并且,在各图中,存在对实质相同的结构要素标注相同的附图标记,省略或简化重复的说明的情况。另外,在本说明书以及权利要求中,“装置”不仅指一个装置,还指由多个装置构成的系统。
26.<折叠系统的结构>
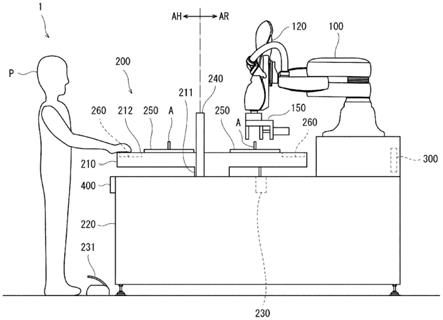
27.对实施方式所涉及的折叠系统1的结构进行说明。图1是表示实施方式所涉及的折叠系统1的结构的一个例子的俯视图。图2是表示实施方式所涉及的折叠系统1的结构的一个例子的侧视图。以下的实施方式中,对折叠系统1是使用机器人100自动进行折叠在载置面上拉伸配置的细长的物品a的作业的系统的情况进行说明。此外,应用折叠系统1的作业只要是折叠细长的对象物的作业即可。另外,在本实施方式中,折叠对象的物品a是带状的物品,具体而言是带。带向载置面上的配置由人通过手工作业来进行,机器人100自主地折叠配置在载置面上的带。以下,也将“物品a”记载为“带a”。
28.如图1以及图2所示,折叠系统1具备机器人100、保持部200、控制装置300、输入装置400。机器人100与保持部200相邻地配置。在本实施方式中,控制装置300配置于机器人100,但也可以配置于保持部200等其他装置。此处,机器人100是折叠装置的一个例子。
29.[保持部]
[0030]
如图1以及图2所示,保持部200具备圆板状的保持主体210、支承保持主体210的架台220、固定装置230。保持主体210以铅垂方向的轴211为中心而旋转自如地配置在架台220上。保持主体210具有圆形状的上表面212。上表面212包括由在其中心通过的分界线划分出的第1上表面部分212a以及第2上表面部分212b。
[0031]
此处,“上方”是指机器人100以及架台220配置在水平的地板面等水平的表面上的情况下从下方朝向上方的方向,“下方”是指相同的情况下的从上方朝向下方的方向。“侧
方”是指相同的情况下的沿着上述表面的方向。“水平方向”是指相同的情况下的水平方向,也是与上述表面平行的方向。“铅垂方向”是指相同的情况下的铅垂方向,是与上述表面垂直的方向。
[0032]
固定装置230根据输入固定输入装置231的指令,执行保持主体210在旋转方向上的固定和上述固定的解除。固定输入装置231接受保持主体210的固定以及固定解除的指令的输入并向固定装置230输出。例如,固定输入装置231也可以是配置为能够供在保持主体210配置带a的作业者p踩踏的脚踏式的踏板。在这种情况下,也可以是,固定装置230在通过固定输入装置231被踩踏而接受输入期间,将保持主体210在旋转方向上的固定解除,在没有接受上述输入期间,将保持主体210在旋转方向上固定。例如,也可以是,固定装置230通过与保持主体210接触而将保持主体210在旋转方向上固定。具体而言,固定装置230可以通过与保持主体210卡合来固定保持主体210,也可以通过与保持主体210之间的摩擦力来固定保持主体210。这样的固定装置230也可以包括固定于架台220的液压、空气压或者电动的缸体等。固定装置230也可以通过使缸杆伸长而与保持主体210卡合或者接触,通过使缸杆收缩而解除上述卡合或者接触。
[0033]
另外,保持部200具备:以在上表面212的上方横穿上表面212的方式沿水平方向延伸的分隔体240。分隔体240固定于架台220。例如,分隔体240也可以构成为包括沿水平方向延伸的杆或者壁等。在本实施方式中,隔着分隔体240而在其两侧划分形成有人作业区域ah和机器人作业区域ar。在人作业区域ah中,作业者p进行作业,在机器人作业区域ar中,配置有机器人100并进行作业。分隔体240防止作业者p与机器人100的干涉。
[0034]
另外,保持部200在上表面部分212a以及212b的每一部分上都具备夹具250以及贮存器260。夹具250用于使带a以拉伸的状态配置。贮存器260构成为配置具体而言收容有折叠的状态的带a,并维持折叠的状态的同时保持该带a。
[0035]
图3是表示实施方式所涉及的夹具250的结构的一个例子的俯视图。如图3所示,夹具250分别在其上表面250a上具备:构成为供折叠之前的拉伸的状态的带a配置的槽251和将带a的端部卡定的卡定部252a~252d。槽251具有u字状的截面形状,且具有与拉伸的状态的带a的平面形状对应的平面形状,并作为用于将该带a配置并定位于保持主体210的引导件发挥功能。卡定部252a~252d分别配置于槽251的端部。槽251的内底面以及夹具250的上表面250a是供带a载置的载置面的一个例子。
[0036]
在本实施方式中,拉伸的状态的带a的平面形状以及槽251的平面形状为十字形状。带a包括第1部分a1~第4部分a4。第1部分a1以及第2部分a2是折叠的部分且相互向相反方向延伸。第3部分a3以及第4部分a4在与第1部分a1以及第2部分a2交叉的方向上相互向相反方向延伸。第3部分a3以及第4部分a4分别构成为,安装于配置有带a的器具或者装置等对象物。与带a相同,槽251包括:分别配置有带a的第1部分a1、第2部分a2、第3部分a3以及第4部分a4的第1槽部分251a、第2槽部分251b、第3槽部分251c以及第4槽部分251d。槽部分251a以及251b在与保持主体210的上表面212的直径垂直的方向上延伸,槽部分251c以及251d在上表面212的直径方向上延伸。
[0037]
此处,将沿着槽部分251a以及251b且从第2槽部分251b朝向第1槽部分251a的方向作为第1配置方向dd1,将沿着槽部分251a以及251b且从第1槽部分251a朝向第2槽部分251b的方向作为第2配置方向dd2。配置方向dd1以及dd2是沿着夹具250的上表面250a的方向,且
相互为相反方向。配置方向dd1以及dd2是第1方向的一个例子。
[0038]
第1部分a1由两个折叠且其作为平坦的表面的带面相互接合的带构成,该带的两端与第3部分a3以及第4部分a4连接,具体而言一体化。第2部分a2由两个折叠且其带面相互接合的带构成,该带的两端与第3部分a3以及第4部分a4连接,具体而言一体化。带a以使第1部分a1以及第2部分a2的带面朝向侧方、换句话说朝向与夹具250的上表面250a交叉的方向的方式配置于槽251。带a以相对于作为载置面的槽251的内底面以及夹具250的上表面250a立起的状态配置。
[0039]
带a以第1部分a1以及第2部分a2折叠的状态安装于对象物,作为冲击吸收器发挥功能。若对第3部分a3或者第4部分a4施加冲击而作用使它们分离的方向的力,则第1部分a1以及第2部分a2各自的接合被破坏同时被拉伸。在接合被破坏时,冲击能量被吸收。另外,由于第1部分a1以及第2部分a2折叠,所以带a使第1部分a1以及第2部分a2中的接合区域变大,同时以紧凑的状态配置于对象物。而且,接合区域的增大提高冲击能量的吸收能力。
[0040]
卡定部252a~252d中的第1卡定部252a配置于第1槽部分251a的外侧的端部,第2卡定部252b配置于第2槽部分251b的外侧的端部,第3卡定部252c配置于第3槽部分251c的外侧的端部,第4卡定部252d配置于第4槽部分251d的外侧的端部。卡定部252c以及252d固定于夹具250。卡定部252a以及252b分别配置为能够沿着槽部分251a以及251b移动。换句话说,卡定部252a以及252b能够向相互接近的方向以及相互远离的方向移动。并且,卡定部252a以及252b分别配置为能够以相对于槽部分251a以及251b突出以及没入的方式移动。在本实施方式中,卡定部252a~252d分别构成为勾住第1部分a1~第4部分a4的端部a1a~a4a,例如为销,但构成为将端部a1a~a4a卡定即可。
[0041]
图4是沿着图3的iv-iv线的剖视侧视图。如图3以及图4所示,保持部200在夹具250内具备:分别使卡定部252a以及252b移动的位移装置261a以及261b;和分别使卡定部252a以及252b相对于槽部分251a以及251b突出以及没入的升降装置262a以及262b。并且,保持部200在夹具250内具备:配置于位移装置261a与升降装置262a之间的施力构件270a;和配置于位移装置261b与升降装置262b之间的施力构件270b。
[0042]
位移装置261a使第1卡定部252a沿着第1槽部分251a向使第1卡定部252a接近第2卡定部252b的第2配置方向dd2和使第1卡定部252a远离第2卡定部252b的第1配置方向dd1位移。位移装置261b使第2卡定部252b沿着第2槽部分251b向使第2卡定部252b接近第1卡定部252a的第1配置方向dd1和使第2卡定部252b远离第1卡定部252a的第2配置方向dd2位移。施力构件270a对第1卡定部252a向远离位移装置261a的方向换句话说第1配置方向dd1施力。施力构件270b对第2卡定部252b向远离位移装置261b的方向换句话说第2配置方向dd2施力。施力构件270a以及270b的例子是螺旋弹簧等弹簧。施力构件270a以及270b使钩在卡定部252a以及252b的带a的第1部分a1以及第2部分a2产生张力。
[0043]
升降装置262a使第1卡定部252a升降,升降装置262b使第2卡定部252b升降。卡定部252a以及252b分别在从槽部分251a以及251b突出时,能够对第1部分a1以及第2部分a2的端部a1a以及a2a进行卡定,在从槽部分251a以及251b没入时,无法对第1部分a1以及第2部分a2的端部a1a以及a2a进行卡定。升降装置262a以及262b分别通过使卡定部252a以及252b没入而解除第1部分a1以及第2部分a2的端部a1a以及a2a的卡定。此处,升降装置262a以及262b是解除装置的一个例子。
[0044]
位移装置261a以及261b分别能够使卡定部252a以及252b沿着夹具250的上表面250a在水平方向上位移即可。例如也可以是,位移装置261a以及261b为了上述位移而具备液压、空气压或者电动的缸体、电动线性促动器或者丝杠机构等。在本实施方式中,使用将旋转运动转换为直线运动的丝杠机构。丝杠机构包括:电动马达263、沿配置方向dd1以及dd2延伸的丝杠264、将电动马达263的旋转驱动力向丝杠264传递的减速装置265、与丝杠264旋合的滚珠螺母等螺母266。螺母266经由施力构件270a或者270b和升降装置262a或者262b而与卡定部252a或者252b连接。电动马达263通过经由减速装置265对丝杠264进行旋转驱动,从而使螺母266与升降装置262a或者262b一起沿丝杠264的轴向亦即配置方向dd1或者dd2进行直线运动。在本实施方式中,电动马达263是伺服马达。
[0045]
升降装置262a以及262b分别能够使卡定部252a以及252b沿铅垂方向升降即可。例如也可以是,升降装置262a以及262b为了上述升降而具备螺线管等促动器。位移装置261a以及261b的电动马达263和升降装置262a以及262b的动作由控制装置300控制。
[0046]
[输入装置]
[0047]
如图2所示,输入装置400配置于人作业区域ah,接受基于作业者p的指令以及信息等的输入,并将该指令以及信息等向控制装置300输出。输入装置400经由有线通信或者无线通信而与控制装置300连接。有线通信以及无线通信的形式可以是任何形式。例如,输入装置400接受执行夹具250上的带a的折叠作业的指令。也可以是,输入装置400接受用于确定出夹具250的槽251以及带a的种类、形状、尺寸、规格以及/或者配置等槽251以及带a的结构的信息的输入。输入装置400的结构没有特别限定,但在本实施方式中,为按钮、键以及/或者触摸面板等。
[0048]
[机器人]
[0049]
图5是表示实施方式所涉及的机器人100的结构的一个例子的侧视图。如图5所示,机器人100具备配置在架台220上的基台110和配置于基台110的臂120以及130。在本实施方式中,臂120以及130能够在以铅垂方向的第1轴s1为中心的同轴上在水平面内转动。这样的机器人100构成同轴双臂机器人。臂120以及130是移动部的一个例子。
[0050]
第1臂120包括连杆121~124和臂驱动装置ma1~ma4(参照图8)。第2臂130包括连杆131~134和臂驱动装置mb1~mb4(参照图8)。臂驱动装置ma1~ma4以及mb1~mb4例如是伺服马达等电动马达等,在本实施方式中是伺服马达。臂驱动装置ma1~ma4以及mb1~mb4的驱动由控制装置300控制。
[0051]
第1连杆121以及131分别能够以第1轴s1为中心而在水平面内转动,并经由旋转关节jta1以及jtb1而与基台110连接。臂驱动装置ma1以及mb1分别通过对旋转关节jta1以及jtb1进行旋转驱动而使第1连杆121以及131转动。第1连杆121以及131在第1轴s1的方向上错开配置。臂120以及130分别能够相互独立地动作,但在以第1轴s1为中心的转动时,可抑制相互的干涉。由此,能够使臂120以及130的转动范围变大。
[0052]
第2连杆122以及132分别能够以铅垂方向的第2轴s2a以及s2b为中心而在水平面内转动,并经由旋转关节jta2以及jtb2而与第1连杆121以及131的前端连接。臂驱动装置ma2以及mb2分别通过对旋转关节jta2以及jtb2进行旋转驱动而使第2连杆122以及132转动。
[0053]
第3连杆123以及133分别以能够沿着铅垂方向的第3轴s3a以及s3b升降的方式经
由直动关节jta3以及jtb3而与第2连杆122以及132的前端连接。臂驱动装置ma3以及mb3分别通过驱动直动关节jta3以及jtb3而使第3连杆123以及133升降。
[0054]
第4连杆124以及134分别以能够以第3连杆123以及133的长边方向的第4轴s4a以及s4b为中心而转动的方式而经由旋转关节jta4以及jtb4与第3连杆123以及133的下端连接。第4轴s4a以及s4b也是铅垂方向的轴。第4连杆124以及134分别构成用于与后述的末端执行器150以及160连接的机械接口。臂驱动装置ma4以及mb4分别通过对旋转关节jta4以及jtb4进行旋转驱动而使第4连杆124以及134转动。上述那样的臂120以及130构成水平多关节型的臂。
[0055]
另外,机器人100具备与臂120以及130的前端具体而言第4连杆124以及134连接的末端执行器150以及160。末端执行器150以及160为相同的结构,并与第4连杆124以及134一同以第4轴s4a以及s4b为中心而转动。末端执行器150以及160是折弯部的一个例子。
[0056]
末端执行器150以及160的结构相同,因此,以下,以第1末端执行器150的结构为中心进行说明,省略与第1末端执行器150重复的第2末端执行器160的说明。
[0057]
图6是表示从侧方观察实施方式所涉及的第1末端执行器150的结构的一个例子的图。图7是表示从下方观察实施方式所涉及的第1末端执行器150的结构的一个例子的图。如图5~图7所示,第1末端执行器150包括第1抵接部151、第2抵接部152、第3抵接部153、基部154、末端执行器驱动装置155。与末端执行器150相同,第2末端执行器160包括第1抵接部161、第2抵接部162、第3抵接部163、基部164、末端执行器驱动装置165。末端执行器驱动装置155以及165是驱动部的一个例子。
[0058]
基部154与第4连杆124连接,例如包括在与第4轴s4a(参照图5)垂直的方向上延伸的板状构件。抵接部151、152以及153配置在板状构件的与第4连杆124相反一侧的主面154a上。在本实施方式中,抵接部151、152以及153是从主面154a朝向下方例如与主面154a大致垂直地突出的柱状构件。抵接部151、152以及153分别在侧部具有接触带a的圆筒状的外周面151a、152a以及153a。也可以是,抵接部151、152以及153沿相同的方向延伸,例如,抵接部151、152以及153的轴向大致彼此平行。
[0059]
抵接部151以及152在各自的基端固定于基部154。第2抵接部152在第1基部方向d1上与第1抵接部151隔开间隔配置。第1基部方向d1是以基部154为基准的方向,且是沿着主面154a的方向。基部方向d1a是第1基部方向d1的相反方向。第1基部方向d1是第2方向的一个例子。
[0060]
第3抵接部153与抵接部151以及152隔开间隔配置。例如,带a能够通过第3抵接部153与抵接部151以及152之间。第3抵接部153以能够向朝向抵接部151以及152之间的空间且与第1基部方向d1交叉的第2基部方向d2及其相反的基部方向d2a移动的方式配置于基部154。第2基部方向d2是沿着以基部154为基准的主面154a的方向,在本实施方式中与第1基部方向d1垂直。第2基部方向d2是朝向抵接部151以及152之间的空间的方向即可。第3抵接部153能够沿与第3抵接部153延伸的方向交叉的方向具体而言正交的方向移动。第2基部方向d2是第3方向的一个例子。
[0061]
第3抵接部153若朝向抵接部151以及152之间的空间移动,则将在第3抵接部153与抵接部151以及152之间通过的带a压入抵接部151以及152之间而折弯。第3抵接部153的移动方向以及移动范围为能够折弯上述带a的范围即可。第3抵接部153若能够折弯上述带a,
则也可以能够移动至到达抵接部151以及152的间隙,也可以能够移动而越过该间隙,也可以能够移动至该间隙的近前为止。
[0062]
末端执行器驱动装置155与第3抵接部153连接,并使第3抵接部153向基部方向d2以及d2a移动。末端执行器驱动装置155能够使第3抵接部153进退移动即可。例如,也可以是,末端执行器驱动装置155为了上述进退移动而具备油压、空气压或者电动的缸体、电动线性促动器、螺线管等促动器、或者丝杠机构等。在丝杠机构中,对滚珠螺母等螺母进行旋转驱动的电动马达也可以是伺服马达。末端执行器驱动装置155的动作由控制装置300控制。另外,第2末端执行器160的末端执行器驱动装置165的动作也由控制装置300控制。
[0063]
此处,伺服马达具备电动马达、对电动马达的旋转件的旋转角进行检测的编码器、对电动马达的电流值进行检测的电流传感器。伺服马达根据从控制装置300输出的指令等,使电动马达动作,将编码器以及电流传感器的检测值向控制装置300输出。控制装置300基于从伺服马达反馈的编码器以及电流传感器的检测值,对该伺服马达的旋转件的旋转量以及旋转速度等进行检测,并使用检测结果等对该伺服马达的旋转开始、旋转停止、旋转速度以及旋转扭矩等进行控制。由此,控制装置300能够使伺服马达在任意的旋转位置停止,能够以任意的旋转速度旋转,能够以任意的旋转扭矩动作。因此,控制装置300能够使第1臂120、第2臂130和末端执行器驱动装置155以及165进行各种精密的动作。
[0064]
[拍摄装置]
[0065]
如图5所示,机器人100在第1臂120的第3连杆123具备拍摄装置170。拍摄装置170的位置只要是能够拍摄机器人作业区域ar内的夹具250的位置即可。拍摄装置170是拍摄用于对至被拍摄体为止的距离等被拍摄体相对于拍摄装置170的三维位置等进行检测的图像的相机。例如,这样的相机是拍摄数字图像的相机,也可以具有立体相机、单目相机、tof相机(tof相机:time-of-flight-camera(飞行时间相机))、条纹投影等图案光投影相机或者使用了光切割法的相机等结构。拍摄装置170朝向下方指向,拍摄用于对夹具250上的带a的三维位置等进行检测的图像。拍摄装置170也可以基于该图像对带a的三维位置以及姿势(朝向)进行检测并向控制装置300输出,也可以将该图像向控制装置300输出,控制装置300对上述三维位置以及姿势进行运算。在本实施方式中,由控制装置300运算。
[0066]
[控制装置]
[0067]
控制装置300对折叠系统1整体的动作进行控制。图8是表示实施方式所涉及的折叠系统1的结构的一个例子的框图。如图8所示,折叠系统1包括控制装置300、输入i/f(接口:interface)505、拍摄元件i/f506、臂驱动电路507、末端执行器驱动电路508、位移驱动电路509、升降驱动电路510、臂驱动装置ma1~ma4以及mb1~mb4、末端执行器驱动装置155以及165、位移装置261a以及261b、升降装置262a以及262b、拍摄装置170、输入装置400作为结构要素。控制装置300包括cpu(central processing unit)501、rom(read only memory)502、ram(random access memory)503、存储器504作为结构要素。控制装置300也可以包括上述电路的至少一个。上述结构要素分别经由总线、有线通信或者无线通信而连接。此外,上述结构要素不是所有都是必需的。
[0068]
cpu501是处理器,对折叠系统1的处理以及动作的整体进行控制。rom502由非易失性半导体存储器等构成,储存用于使cpu501控制处理以及动作的程序以及数据等。ram503由易失性半导体存储器等构成,暂时储存由cpu501执行的程序以及处理中途或者处理完毕
的数据等。存储器504由易失性存储器以及非易失性存储器等半导体存储器、硬盘(hdd:hard disc drive)以及ssd(solid state drive)等存储装置构成。
[0069]
用于使cpu501动作的程序预先保存于rom502或者存储器504。cpu501从rom502或者存储器504将程序在ram503读出并展开。cpu501执行在ram503展开的程序中的编码的各命令。此外,控制装置300的各功能也可以通过由cpu501、rom502以及ram503等构成的计算机系统来实现,也可以通过电子电路或者集成电路等专用的硬件电路来实现,也可以通过上述计算机系统以及硬件电路的组合来实现。
[0070]
输入i/f505与输入装置400连接,接受来自输入装置400的信息以及指令等的输入。输入i/f505也可以包括转换输入信号的电路等。拍摄元件i/f506根据cpu501的指令,来控制拍摄装置170的拍摄元件(未图示)的驱动。拍摄元件i/f506在ram503或者存储器504获取由拍摄装置170拍摄到的图像。拍摄元件i/f506也可以包括用于拍摄装置170的驱动的电路等。
[0071]
臂驱动电路507根据cpu501的指令,对臂驱动装置ma1~ma4以及mb1~mb4各自的伺服马达供给电力并控制该伺服马达的驱动。末端执行器驱动电路508根据cpu501的指令,对末端执行器驱动装置155以及165供给电力并控制其驱动。
[0072]
位移驱动电路509根据cpu501的指令,对位移装置261a以及261b供给电力并控制其驱动。升降驱动电路510根据cpu501的指令,对升降装置262a以及262b供给电力并控制其驱动。
[0073]
图9是表示实施方式所涉及的控制装置300的功能结构的一个例子的框图。如图9所示,控制装置300包括总体控制部551、臂控制部552、末端执行器控制部553、位移控制部554、升降控制部555、拍摄控制部556、图像处理部557、存储部558作为功能的结构要素。除去存储部558之外的上述功能的结构要素的各功能通过cpu501等来实现。存储部558的功能通过存储器504、rom502以及ram503等来实现。
[0074]
总体控制部551从输入装置400接受指令等的输入,并根据该输入以及程序等,分别对由臂控制部552、末端执行器控制部553、位移控制部554、升降控制部555、拍摄控制部556以及图像处理部557构成的功能的结构要素输出指令。另外,总体控制部551从该功能的结构要素获取其动作的信息。总体控制部551使用获取到的信息而使上述功能的结构要素联合、协调以及/或者配合地动作。总体控制部551能够使臂驱动装置ma1~ma4以及mb1~mb4、末端执行器驱动装置155以及156、位移装置261a以及261b、升降装置262a以及262b和拍摄装置170中的至少一个装置动作,同时使其他的至少一个装置动作。
[0075]
存储部558能够存储各种信息,并读出存储的信息。存储部558将包括夹具250以及槽251的种类、形状、尺寸、规格以及配置等的结构的信息作为样板等而存储。另外,存储部558也可以存储由拍摄装置170拍摄到的图像,也可以存储程序。
[0076]
拍摄控制部556控制拍摄装置170的动作。例如也可以是,拍摄控制部556使拍摄装置170在机器人100开始夹具250上的带a的折叠作业的紧前等预定的时间点进行拍摄。控制装置300基于根据拍摄到的图像检测的带a的三维位置以及姿势来控制机器人100。
[0077]
图像处理部557使用由拍摄装置170拍摄到的图像和存储部558的夹具250以及槽251的样板,提取映现于该图像的带a,对该带a相对于拍摄装置170的三维位置以及姿势进行检测。图像处理部557将该三维位置以及姿势向臂控制部552等输出。
[0078]
臂控制部552对臂驱动装置ma1~ma4以及mb1~mb4的动作进行控制。臂控制部552基于图像处理部557的检测结果等,控制臂驱动装置ma1~ma4以及mb1~mb4,从而使臂120以及130进行与带a的折叠作业对应的动作。另外,臂控制部552从臂驱动装置ma1~ma4以及mb1~mb4的伺服马达获取旋转量等动作量的信息,并基于该动作量,对包括臂120以及130的各连杆和末端执行器150以及160的位置、姿势、移动方向以及移动速度等的位置姿势信息进行检测。臂控制部552将该位置姿势信息向末端执行器控制部553输出。并且,臂控制部552以通过将位置姿势信息用作反馈信息而使末端执行器150以及160的位置以及姿势等成为目标的位置以及姿势等的方式控制臂驱动装置ma1~ma4以及mb1~mb4的动作。
[0079]
末端执行器控制部553控制末端执行器驱动装置155以及165的动作。末端执行器控制部553通过基于末端执行器150以及160的位置姿势信息而控制末端执行器驱动装置155以及165,从而使末端执行器150以及160进行折弯带a的动作。
[0080]
位移控制部554控制位移装置261a以及261b的动作。位移控制部554通过基于末端执行器150以及160的位置姿势信息以及带a的折弯动作的信息而控制位移装置261a以及261b,从而使卡定部252a以及252b分别向配置方向dd2以及dd1位移。卡定部252a以及252b分别将利用末端执行器150以及160而折叠的带a通过向配置方向dd2以及dd1按压而更密集地折叠。
[0081]
升降控制部555对升降装置262a以及262b的动作进行控制。升降控制部555基于末端执行器150以及160的位置姿势信息以及带a的折弯动作的信息,使从槽部分251a以及251b突出的卡定部252a以及252b没入。例如,末端执行器150以及160使带a介于抵接部151~153之间以及抵接部161~163之间,在使第3抵接部153以及163移动的时间点,升降控制部555使卡定部252a以及252b没入。由此,带a的折弯变容易。此外,上述时间点也可以是与第3抵接部153以及163的移动开始同时、其紧前及其紧后等移动开始时刻的附近的任意时间点。
[0082]
<折叠系统的动作>
[0083]
对实施方式所涉及的折叠系统1的动作进行说明。图10是表示实施方式所涉及的折叠系统1的动作的一个例子的流程图。图11~图16是表示实施方式所涉及的折叠系统1的动作期间的夹具250上的带a的各状态的一个例子的俯视图。
[0084]
如图1、图3以及图10所示,在步骤s101中,作业者p在位于人作业区域ah内的保持主体210的上表面部分212a或者212b的夹具250设置带a。本例子中,在上表面部分212a的夹具250设置带a。此时,该夹具250的所有卡定部252a~252d突出,作业者p将带a的第1部分a1~第4部分a4的端部a1a~a4a分别卡定于卡定部252a~252d。由此,带a以拉伸的状态配置于夹具250的槽251,相对于夹具250定位。
[0085]
接着,在步骤s102中,在带a的设置结束后,作业者p通过踩踏固定输入装置231而将保持主体210的固定解除,使保持主体210大致以180
°
旋转,使上表面部分212a的夹具250以及带a向机器人100的正面移动。在移动结束后,作业者p通过使脚离开固定输入装置231,从而使保持主体210固定于固定装置230。在固定后,作业者p经由输入装置400将带a的折叠作业的执行的指令向控制装置300发送。
[0086]
此外,保持主体210旋转,从而上表面部分212a位于机器人作业区域ar内,上表面部分212b位于人作业区域ah内。作业者p在执行以下的步骤s103~s113的处理期间,重复步
骤s101的处理,在上表面部分212b的夹具250设置新的带a。
[0087]
接着,在步骤s103中,控制装置300使拍摄装置170拍摄机器人作业区域ar内的夹具250。拍摄到的图像映现夹具250上的带a的像。接着,在步骤s104中,控制装置300使用拍摄到的图像,对带a相对于拍摄装置170的三维位置以及姿势进行检测。
[0088]
接着,如图10以及图11所示,在步骤s105中,控制装置300基于带a的三维位置以及姿势,使臂120以及130动作,从上方将末端执行器150以及160配置于带a的第1部分a1。此时,第1末端执行器150比第2末端执行器160接近第3部分a3以及第4部分a4。抵接部151~153以及161~163向下延伸。在第1末端执行器150中,通过第3抵接部153后退,使抵接部151以及152与第3抵接部153之间的间隙扩大,第1部分a1在该间隙通过。在第2末端执行器160中,通过第3抵接部163后退,使抵接部161以及162与第3抵接部163之间的间隙扩大,第1部分a1在该间隙通过。
[0089]
接着,在步骤s106中,控制装置300通过使第1卡定部252a没入,从而将第1部分a1的端部a1a的卡定解除。
[0090]
接着,如图10以及图12所示,在步骤s107中,控制装置300为了折叠带a而使末端执行器150以及160的第3抵接部153以及163移动同时使末端执行器150以及160向朝向第3部分a3以及第4部分a4的第2配置方向dd2移动。具体而言,控制装置300使第1末端执行器150的第3抵接部153朝向抵接部151以及152前进,使第2末端执行器160的第3抵接部163朝向抵接部161以及162前进。控制装置300通过使臂120以及130动作,从而使末端执行器150以及160向第2配置方向dd2移动。
[0091]
如图13所示,第3抵接部153以及163分别在抵接部151以及152之间和抵接部161以及162之间压入第1部分a1,从而折弯第1部分a1。换句话说,第3抵接部153以及163分别在沿着夹具250的上表面250a且与配置方向dd1以及dd2交叉的方向例如大致正交的方向上折弯第1部分a1。由此,在第1部分a1,分别沿着第3抵接部153以及163而形成有两个折痕a1b以及a1c。末端执行器150以及160通过向第2配置方向dd2移动,从而使折痕a1b以及a1c的间隔变窄并且使折痕a1b以及a1c接近第3部分a3以及第4部分a4。由此,在第1部分a1的折痕a1b以及a1c之间形成有与折痕a1b以及a1c相反朝向的折痕a1d。由此,第1部分a1以第2配置方向dd2作为折叠方向,以之字形状或者w字状稀疏地折叠。
[0092]
控制装置300若第3抵接部153到达抵接部151以及152之间的预定位置则使第3抵接部153停止,若末端执行器150到达预定位置则使其移动结束。控制装置300若第3抵接部163到达抵接部161以及162之间的预定位置则使第3抵接部163停止,若末端执行器160到达预定位置则使其移动结束。抵接部以及末端执行器的预定位置也可以基于带a的结构等而任意地设定。例如,末端执行器150以及160各自的预定位置也可以是末端执行器150与第3部分a3以及第4部分a4邻接的位置以及末端执行器160与上述状态的末端执行器150邻接的位置等。
[0093]
此外,控制装置300使第3抵接部153以及163的移动和末端执行器150以及160的移动也可以如上述那样以至少一部分交叠的方式执行,也可以分别执行。例如,也可以是,在后者的情况下,控制装置300在第3抵接部153以及163的移动结束之后,使末端执行器150以及160移动。
[0094]
接着,如图10以及图14所示,在步骤s108中,控制装置300在步骤s107中的移动结
束之后,使第1卡定部252a突出,进一步向第2配置方向dd2移动。第1卡定部252a从侧方与折叠的状态的第1部分a1抵接并向第2配置方向dd2按压。另外,控制装置300使末端执行器150以及160上升而从带a除去。由此,如图15所示,第1部分a1以使折痕a1b、a1c以及a1d的间隔变窄的方式以之字形状或者w字状密集地折叠。此时,第1部分a1以使带面相向且相邻的方式折叠。此外,控制装置300使第1卡定部252a的移动和末端执行器150以及160的除去也可以以至少一部分交叠的方式执行,也可以分别执行。
[0095]
接着,控制装置300相对于带a的第2部分a2,执行与步骤s105~s108相同的步骤s109~s112的处理。此外,在步骤s109中,第1末端执行器150比第2末端执行器160远离第3部分a3以及第4部分a4。并且,末端执行器150以及160相对于步骤s105中的状态以第4轴s4a以及s4b为中心而旋转180
°
。作为步骤s105~s112的处理的结果,带a如图16所示成为第1部分a1以及第2部分a2以之字形状或者w字状密集地折叠的状态换句话说折叠结束的状态。
[0096]
接着,在步骤s113中,控制装置300通过使臂120以及130和末端执行器150以及160动作,从而使用末端执行器150以及160把持折叠结束的状态的带a,从夹具250向相同的上表面部分212a的贮存器260移载。
[0097]
接着,在步骤s114中,作业者p对移载至贮存器260的带a进行视认,且若新的带a向上表面部分212b的夹具250的设置结束,则与步骤s102相同使保持主体210旋转。由此,上表面部分212a位于人作业区域ah内,上表面部分212b位于机器人作业区域ar内。作业者p从上表面部分212a的贮存器260取出折叠的状态的带a,并向下一个工序的装置等转移。控制装置300在接到多个带a的折叠作业的结束的指令时(步骤s115中是),结束折叠作业,在没有接到多个带a的折叠作业的结束的指令时(步骤s115中否),重复步骤s103~s114的处理。
[0098]
<效果等>
[0099]
作为实施方式所涉及的折叠装置的机器人100具备:第1末端执行器150,其作为对细长的对象物亦即带a进行折弯的折弯部;和第1臂120,其作为使第1末端执行器150移动的移动部。第1臂120构成为,使折弯带a的第1末端执行器150向将折弯的带a折叠的方向亦即第1方向移动。例如,第1方向也可以是配置方向dd1或者dd2。
[0100]
根据上述结构,机器人100通过使用第1臂120使折弯了带a的第1末端执行器150沿第1方向移动,从而能够折叠带a。由此,能够简化用于折叠带a的构造。并且,也简化了使用第1末端执行器150和第1臂120的折叠带a的动作。因此,能够简化用于折叠带a的结构。另外,通过使用作为机器人臂的第1臂120作为移动部,从而第1末端执行器150的位置以及姿势的自由度提高。并且,能够进行第1末端执行器150的位置以及姿势的精密的控制。
[0101]
另外,也可以是,带a在折叠时以带a的表面亦即带面朝向侧方的立起的状态配置。根据上述结构,第1末端执行器150通过使带a在沿着载置有带a的载置面的方向折弯并向沿着载置面的配置方向dd1或者dd2移动,从而能够折叠带a。由此,带a以使带面相向且相邻的方式折叠。因此,第1末端执行器150以及第1臂120例如能够从载置面的上方接近带a,容易折叠该带a。
[0102]
另外,也可以是,机器人100具备:作为第1折弯部以及第2折弯部的末端执行器150以及160;和分别使末端执行器150以及160移动的作为第1移动部以及第2移动部的臂120以及130。臂120以及130也可以构成为,在折弯带a时,使末端执行器150以及160在带a延伸的方向上相邻配置,使折弯带a的末端执行器150以及160向配置方向dd1或者dd2移动。根据上
述结构,机器人100通过使用末端执行器150以及160使带a在两个部位折弯,并使末端执行器150以及160移动,使这两个部位相互接近,从而能够折叠带a。因此,能够提高折叠动作的效率。
[0103]
另外,也可以是,第1末端执行器150具有:第1抵接部151;第2抵接部152,其在作为第2方向的第1基部方向d1上与第1抵接部151向隔开间隔配置;第3抵接部153,其配置为能够向作为朝向抵接部151以及152之间的空间且与第1基部方向d1交叉的第3方向的第2基部方向d2移动;以及末端执行器驱动装置155,其作为使第3抵接部153向第2基部方向d2移动的驱动部。第1末端执行器150也可以构成为,通过使第3抵接部153相对于在抵接部151以及152与第3抵接部153之间通过而延伸的带a向第2基部方向d2移动,从而折弯带a。此外,第2基部方向d2也可以是与配置方向dd1或者dd2交叉的方向。
[0104]
根据上述结构,第1末端执行器150通过使第3抵接部153相对于抵接部151以及152与第3抵接部153之间的带a移动的结构,能够折弯该带a。因此,能够简化用于折弯带a的结构。并且,第3抵接部153折弯带a的第2基部方向d2与折叠带a的配置方向dd1或者dd2交叉,因此,折弯的带a的折叠容易。另外,第2末端执行器160也可以具有与第1末端执行器150相同的结构。
[0105]
另外,也可以是,抵接部151~153是具有接触带a的圆筒状的外周面151a、152a以及153a的柱状构件。根据上述结构,减少抵接部151~153与带a之间的摩擦力,因此,能够实现圆滑的带a的折弯。
[0106]
另外,抵接部151~153也可以沿相同的方向延伸。根据上述结构,使带a顺利地在抵接部151以及152与第3抵接部153之间通过并折弯。
[0107]
另外,实施方式所涉及的折叠系统1具备机器人100和保持带a的保持部200。并且,保持部200具有:第1卡定部252a,其配置在保持部200上且卡定有带a的端部a1a;第2卡定部252b,其配置在保持部200上配置且卡定有带a的端部a2a;升降装置262a,其作为将端部a1a向第1卡定部252a的卡定解除的解除装置;以及位移装置261a,其使第1卡定部252a向接近第2卡定部252b的方向以及远离第2卡定部252b的方向位移。此外,也可以是,升降装置262a能够使第1卡定部252a突出以及没入,通过使第1卡定部252a没入,将相对于第1卡定部252a的卡定解除。
[0108]
根据上述结构,位移装置261a能够使第1卡定部252a按照带a的长度进行位移。因此,能够使各种长度的带a以拉伸的状态由保持部200保持。另外,升降装置262a通过将向第1卡定部252a的卡定解除,能够使拉伸的状态的带a变自由。由此,带a的折弯变容易。另外,升降装置262a构成为使第1卡定部252a没入,因此,能够简化结构。
[0109]
另外,位移装置261a也可以构成为,通过使第1卡定部252a向接近第2卡定部252b的方向位移,从而能够进一步将由机器人100折叠的带a折叠。根据上述结构,第1卡定部252a能够与折叠的带a接触并向折叠方向按压。由此,第1卡定部252a能够密集地折叠带a。
[0110]
另外,也可以是,保持部200具有施力构件270a,上述施力构件270a将第1卡定部252a向使第1卡定部252a离开第2卡定部252b的方向进行施力。根据上述结构,施力构件270a相对于以拉伸的状态配置在保持部200上的带a,进一步给予拉伸的方向的张力。因此,保持部200能够不受带a的长度的误差影响地将带a以可靠地拉伸的状态保持。由此,能够实现稳定的带a的折叠。
[0111]
另外,也可以是,折叠系统1具备:控制第1末端执行器150、第1臂120以及保持部200的动作的控制装置300。也可以是,控制装置300与第1末端执行器150相对于在抵接部151以及152与第3抵接部153之间通过而延伸的带a的折弯动作对应地使升降装置262a解除向第1卡定部252a的卡定。根据上述结构,控制装置300能够协调控制基于第1末端执行器150的带a的折弯动作和基于升降装置262a的带a的卡定的解除动作。因此,能够实现带a的圆滑的折弯。
[0112]
另外,也可以是,控制装置300使位移装置261a与第1臂120的相对于折弯带a的第1末端执行器150的向配置方向dd1或者dd2(折叠方向)的移动对应地进行使第1卡定部252a向接近第2卡定部252b的方向位移。根据上述结构,控制装置300能够协调地控制基于第1末端执行器150以及第1臂120的带a的折叠动作和基于位移装置261a以及第1卡定部252a的带a的折叠动作。因此,能够实现带a的圆滑的折叠。
[0113]
<其他实施方式>
[0114]
以上,对本公开的实施方式的例子进行了说明,但本公开不限定于上述实施方式。即,能够在本公开的范围内进行各种变形以及改进。例如,将各种变形施加于实施方式的方式以及将不同的实施方式的结构要素组合而构建的形式也包含于本公开的范围内。
[0115]
例如,分别在实施方式所涉及的末端执行器150以及160中,第1抵接部151以及161与第2抵接部152以及162配置于相对于彼此而固定的位置,但不限定于此。例如,也可以是,第1抵接部151以及161与第2抵接部152以及162的至少一方配置为能够向第1抵接部151以及161与第2抵接部152以及162隔开间隔配置的方向亦即第2方向(第1基部方向d1)及其相反方向(基部方向d1a)移动。根据上述结构,末端执行器150以及160能够对具有各种形状以及尺寸、如具有各种厚度的带a等对象物进行折弯。
[0116]
另外,也可以是,分别在实施方式所涉及的末端执行器150以及160中,抵接部151~153以及161~163具有与带a接触的外周面,并且配置为能够沿该外周面的周向旋转。根据上述结构,可减少带a相对于抵接部151~153以及161~163的滑动阻力,因此,能够实现圆滑的带a的折弯。
[0117]
另外,实施方式所涉及的末端执行器150以及160分别构成为使用三个抵接部151~153以及161~163来折弯带a,但不限定于此。末端执行器150以及160也可以具备能够折弯带a的任何结构。例如,也可以是,末端执行器150以及160具备四个以上抵接部,并构成为其中的至少一个移动。
[0118]
另外,实施方式所涉及的末端执行器150以及160分别具备一组抵接部151~153以及161~163,但不限定于此。末端执行器150以及160也可以具备两组以上抵接部。由此,一个末端执行器能够进行伴有两个以上的折痕的折弯。
[0119]
另外,在实施方式中,控制装置300构成为,相对于带a的一个部分,各执行一次分别使用了末端执行器150以及160的折弯动作,但不限定于此。例如,控制装置300也可以在末端执行器150以及160的至少一个中,执行两次以上折弯动作,也可以仅使用末端执行器150以及160的一方执行一次以上的折弯动作。并且,折叠系统1所折叠的对象物不限定于十字状的带,只要是细长的对象物即可。例如,对象物也可以是i字状的带,在这种情况下,折叠系统1也可以相对于在中央固定的带,在固定部的两侧与实施方式相同地执行折叠,也可以相对于在端部固定的带,在固定部的单侧执行折叠。
[0120]
另外,在实施方式中,机器人100是水平多关节型机器人,但不限定于此。例如,机器人100也可以作为垂直多关节型机器人、极坐标型机器人、柱坐标型机器人、直角坐标型机器人或者其他机器人而构成。并且,末端执行器150以及160分别搭载于水平多关节型的臂120以及130,但不限定于此。末端执行器150以及160也可以搭载于相互不同型式的臂。
[0121]
另外,在实施方式中,机器人100作为具备臂120以及130的双臂机器人而构成,但不限定于此。例如,机器人100也可以仅具备一个臂,也可以具备三个以上的臂。例如,臂120以及130也可以搭载于不同的机器人。
[0122]
另外,在实施方式中,臂120以及130构成为具有彼此连接的四个连杆,但不局限于此,各个连杆的数量也可以是三个以下,也可以是五个以上。
[0123]
另外,在实施方式中,控制装置300使用由拍摄装置170拍摄到的图像,对夹具250上的带a的三维位置以及姿势进行检测,但不限定于此。例如,也可以取代拍摄装置170而设置有计测距离的传感器。控制装置300也可以使用该传感器的计测距离而对夹具250上的带a的位置进行检测。上述传感器的例子为光电传感器、激光传感器以及超声波传感器等。
[0124]
附图标记说明
[0125]
1...折叠系统;100...机器人(折叠装置);120、130...臂(移动部);150、160...末端执行器(折弯部);151、161...第1抵接部;151a、152a...外周面;152、162...第2抵接部;153、163...第3抵接部;155、165...末端执行器驱动装置(驱动部);200...保持部;252a...第1卡定部;252b...第2卡定部;261a、261b...位移装置;262a、262b...升降装置(解除装置);270a、270b...施力构件;300...控制装置;a...带(物品)。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1