控制装置、控制方法以及程序与流程
1.本发明涉及控制装置、控制方法以及程序。
背景技术:
2.以往,已知有与作业者一起进行共同作业的机器人的控制装置(例如,参照专利文献1)。
3.专利文献1的控制装置构成为,基于摄像机的拍摄结果来推定作业者的行动,并根据该作业者的行动来使机器人动作。例如,在将单元安装于组装对象品的情况下,在通过机器人将单元移动到安装位置后,通过机器人以及作业者进行螺纹紧固而将单元安装于组装对象品。接着,通过机器人将线缆带入组装对象品中的预定位置,作业者接受该线缆,通过作业者将线缆与单元连接。
4.而且,在通过机器人将单元移动至安装位置时,在作业者进入机器人或单元的作业区域或运转区域的情况下,使机器人减速或停止。同样地,在通过机器人使线缆移动至预定位置时,在作业者进入机器人的作业区域或运转区域的情况下,使机器人减速或停止。由此,能够抑制机器人以及单元与作业者碰撞。
5.现有技术文献
6.专利文献
7.专利文献1:日本特开2018-62016号公报
技术实现要素:
8.发明所要解决的问题
9.然而,在上述的以往的控制装置中,能够使机器人进行与作业者的共同作业,但基于作业者是否进入机器人的作业区域或运转区域来控制机器人,未充分考虑作业者的动作,关于这一点存在改善的余地。
10.本发明是为了解决上述的问题而完成的,本发明的目的在于提供一种在与作业者的共同作业时能够使机器人进行与作业者对应的适当的动作的控制装置、控制方法以及程序。
11.用于解决问题的手段
12.本发明的控制装置是控制与作业者一起进行共同作业的机器人的装置,具备:存储部,其存储有用于使机器人执行与作业者的共同作业的动作程序;控制部,其在共同作业时基于动作程序来控制机器人;计算部,其计算共同作业时的作业者的动作;以及修正部,其基于由计算部计算出的作业者的动作来修正动作程序。
13.通过这样构成,基于作业者的动作,对与作业者进行共同作业的机器人的动作进行修正,由此能够使机器人进行与作业者对应的适当的动作。
14.本发明的控制方法是控制与作业者一起进行共同作业的机器人的方法,具备:基于用于使机器人执行与作业者的共同作业的动作程序来控制机器人的步骤;计算共同作业
时的作业者的动作的步骤;以及基于计算出的作业者的动作来修正动作程序的步骤。
15.本发明的程序是用于使计算机执行如下步骤的程序:基于用于使机器人执行与作业者的共同作业的动作程序来控制机器人的步骤;计算共同作业时的作业者的动作的步骤;以及基于计算出的作业者的动作来修正动作程序的步骤。
16.发明效果
17.根据本发明的控制装置、控制方法以及程序,在与作业者共同作业时,能够使机器人进行与作业者对应的适当的动作。
附图说明
18.图1是表示本实施方式的机器人控制系统的概略结构的框图。
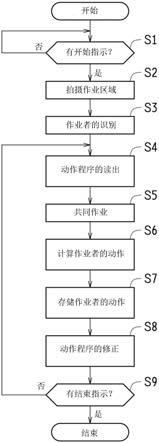
19.图2是用于说明本实施方式的机器人控制系统的动作的流程图。
具体实施方式
20.以下,对本发明的一个实施方式进行说明。
21.首先,参照图1,对具备本发明的一个实施方式的控制装置1的机器人控制系统100的结构进行说明。
22.机器人控制系统100例如应用于工厂的生产现场,构成为在生产现场使机器人2执行与作业者的共同作业。在机器人控制系统100中,机器人2未被栅栏等分隔,人能够触及机器人2。如图1所示,该机器人控制系统100具备控制装置1、机器人2以及拍摄装置3。
23.控制装置1构成为控制包括机器人2的机器人控制系统100。具体而言,控制装置1构成为基于拍摄装置3的拍摄结果,使机器人2进行与作业者的共同作业。
24.共同作业是由作业者以及机器人2协作进行的作业,包括作业者所分担的作业和机器人2所分担的作业。作为具体例,共同作业由机器人2从第一托盘拾取工件并搬入到预定位置的作业、作业者对预定位置的工件进行加工的作业、以及机器人2将加工后的工件搬出并放置到第二托盘的作业构成。共同作业例如可反复执行。
25.另外,控制装置1包括运算部11、存储部12以及输入输出部13。运算部11构成为通过基于存储于存储部12的程序等执行运算处理来控制控制装置1。在存储部12中存储有用于控制机器人2的动作程序等。动作程序包括用于使机器人2进行与作业者的共同作业的基准程序和用于根据作业者调整该基准程序的调整用数据。基准程序与作业者无关地被共用,调整用数据根据每个作业者而设定。即,在存储部12中存储有各作业者用的动作程序。在输入输出部13连接有机器人2以及拍摄装置3等。此外,通过运算部11执行存储于存储部12的程序,实现本发明的“控制部”、“计算部”以及“修正部”。另外,控制装置1是本发明的“计算机”的一个例子。
26.机器人2构成为由控制装置1控制,进行与作业者的共同作业。例如,机器人2具有多轴臂和设置于多轴臂的前端的作为末端执行器的手。多轴臂是为了使手移动而设置的,手是为了保持工件而设置的。
27.拍摄装置3构成为对由作业者以及机器人2进行共同作业的作业区域进行拍摄。该作业区域是将进行共同作业的作业者以及机器人2的周围包围的区域,是包含在共同作业时供作业者、机器人2以及工件通过的区域在内的区域。拍摄装置3是为了识别进行共同作
业的作业者,并且计算共同作业时的作业者的动作而设置的。拍摄装置3的拍摄结果被输出到控制装置1。
28.在此,控制装置1构成为计算共同作业时的作业者的动作,并且基于该计算结果来修正进行共同作业的机器人2的动作。作业者的动作的计算以及机器人2的动作的修正根据每个作业者进行,并且每当执行共同作业时进行。即,控制装置1构成为基于共同作业时的作业者的动作来学习与该作业者进行共同作业的机器人2的动作。
29.具体而言,控制装置1构成为基于拍摄装置3的拍摄结果来识别与机器人2进行共同作业的作业者。例如,控制装置1构成为,根据拍摄装置3的拍摄结果来检测作业者的面部,并将该检测结果与存储于存储部12中的作业者的面部图像的数据库进行对照,从而识别作业者。此外,在存储部12中存储有登记在数据库中的各作业者用的动作程序。
30.而且,控制装置1构成为,在使机器人2进行与识别出的预定的作业者的共同作业的情况下,读出预定的作业者用的动作程序,基于该动作程序使机器人2动作。在预定的作业者用的动作程序中,包含用于使机器人2进行基准的动作(初始设定下的动作)的基准程序和预定的作业者用的调整用数据。预定的作业者是进行与机器人2的共同作业的作业者,例如是登记于存储部12的数据库中的作业者中的任一个。
31.另外,控制装置1构成为基于共同作业时的拍摄装置3的拍摄结果来计算进行共同作业的预定的作业者的动作。即,计算出共同作业时的预定的作业者的位置(占有空间)的经时变化。而且,控制装置1构成为,将计算出的预定的作业者的动作存储于存储部12,基于蓄积于存储部12的预定的作业者的动作,计算预定的作业者用的调整用数据。即,每当算出预定的作业者的动作时,修正预定的作业者用的调整用数据。
32.这样的预定的作业者的动作的计算以及预定的作业者用的调整用数据的修正在每次执行预定的作业者以及机器人2的共同作业时进行。因此,通过蓄积共同作业时的预定的作业者的动作,出现预定的作业者的动作的特征(倾向),因此通过根据该预定的作业者的动作的特征来修正机器人2的动作,能够使进行与预定的作业者的共同作业的机器人2的动作成为与预定的作业者相应的适当的动作。
33.例如,根据预定的作业者的移动轨迹的特征,以抑制与预定的作业者的干涉(碰撞)的方式调整机器人2的移动轨迹。另外,根据预定的作业者的移动速度的特征,调整机器人2的移动速度,以使共同作业顺畅地进行。
[0034]-机器人控制系统的动作-[0035]
接下来,参照图2,对本实施方式的机器人控制系统100的动作进行说明。此外,以下的各步骤由控制装置1执行。
[0036]
首先,在图2的步骤s1中,判断是否受理了共同作业的开始指示。然后,在判断为受理了共同作业的开始指示的情况下,移至步骤s2。另一方面,在判断为未受理共同作业的开始指示的情况下,反复进行步骤s1。即,控制装置1等待至受理共同作业的开始指示为止。
[0037]
接着,在步骤s2中,开始由拍摄装置3进行的共同作业的作业区域的拍摄。然后,进行共同作业的作业者进入作业区域,该作业者被拍摄装置3拍摄。拍摄装置3的拍摄结果被输入到控制装置1。
[0038]
接着,在步骤s3中,基于拍摄装置3的拍摄结果,识别进行共同作业的作业者。例如,根据拍摄装置3的拍摄结果来检测作业者的面部,通过将该检测结果与存储部12的数据
库进行对照,来识别进行共同作业的作业者。
[0039]
接着,在步骤s4中,读出识别出的预定的作业者用的动作程序。预定的作业者用的动作程序包括共用的基准程序和预定的作业者用的调整用数据,用于在共同作业时使机器人2进行与预定的作业者对应的动作。
[0040]
接着,在步骤s5中,通过执行预定的作业者用的动作程序,使机器人2进行与预定的作业者的共同作业。进行共同作业的机器人2的动作通过预定的作业者用的调整用数据,根据预定的作业者的动作的特征进行调整。即,进行共同作业的机器人2的动作从机器人2的基准的动作(初始设定下的动作)变更为预定的作业者用。在预定的作业者以及机器人2的共同作业时,通过拍摄装置3拍摄作业区域,拍摄进行共同作业的预定的作业者。
[0041]
接着,在步骤s6中,在1次共同作业结束之后,基于共同作业时的拍摄装置3的拍摄结果,计算进行共同作业时的预定的作业者的动作。即,基于拍摄装置3的拍摄结果,计算从开始1次共同作业到结束为止的预定的作业者的动作。
[0042]
接着,在步骤s7中,将计算出的预定的作业者的动作存储于存储部12。因此,在存储部12中储存预定的作业者进行共同作业时的动作历史记录。
[0043]
接着,在步骤s8中,基于储存于存储部12中的预定的作业者的动作,计算并更新预定的作业者用的调整用数据。即,通过在步骤s6中计算出的预定的作业者的动作,对预定的作业者用的调整用数据进行修正。即,通过预定的作业者的动作来修正预定的作业者用的动作程序。由此,根据预定的作业者的动作的特征来修正动作程序,从而修正下一次与预定的作业者共同作业时的机器人2的动作。
[0044]
接着,在步骤s9中,判断是否受理了共同作业的结束指示。然后,在判断为受理了共同作业的结束指示的情况下,使机器人2以及拍摄装置3停止,移至结束。另一方面,在判断为未受理共同作业的结束指示的情况下,返回步骤s4,反复进行共同作业。
[0045]-效果-[0046]
在本实施方式中,如上所述,基于共同作业时的预定的作业者的动作,对与该预定的作业者的下次共同作业时的机器人2的动作进行修正,由此能够使机器人2进行与预定的作业者对应的适当的动作。由此,即使在变更了进行与机器人2的共同作业的作业者的情况下,也能够根据各作业者使机器人2适当地动作。其结果是,能够在充分考虑了作业者的动作的特征的基础上使机器人2动作,因此能够实现作业者与机器人2进行共同作业的环境下的安全性的提高。
[0047]
例如,根据预定的作业者的移动轨迹的特征,以抑制与预定的作业者的干涉的方式调整机器人2的移动轨迹,由此能够抑制在共同作业时机器人2与预定的作业者干涉。另外,根据预定的作业者的移动速度的特征,调整机器人2的移动速度以使共同作业顺畅地进行,由此能够顺畅地进行共同作业,因此能够实现安全性的提高。
[0048]
另外,在预定的作业者的熟练度提高,且共同作业中的预定的作业者所进行的作业的作业时间变短的情况下,根据该预定的作业者的熟练度的提高,修正与预定的作业者的共同作业时的机器人2的动作,由此能够实现共同作业的作业时间的缩短,并且能够抑制在共同作业时预定的作业者不必要地等待的等待时间的产生。
[0049]
另外,在本实施方式中,通过储存预定的作业者的动作,能够实现预定的作业者的动作的特征的推定精度的提高。
[0050]-其他实施方式-[0051]
此外,本次公开的实施方式在所有方面均为例示,并不成为限定性解释的依据。因此,本发明的技术范围并非仅通过上述的实施方式来解释,而是基于权利要求书的记载来划定。另外,本发明的技术范围包括与权利要求书等同的含义和范围内的所有变更。
[0052]
例如,在上述实施方式中,示出了机器人搬运工件的例子,但不限于此,机器人也可以对工件进行加工等。即,在上述实施方式中,示出了机器人2具有多轴臂以及手的例子,但不限于此,机器人的结构可以是任意的结构。
[0053]
另外,在上述实施方式中,示出了通过作业者的面部来识别作业者的例子,但不限于此,也可以通过作业者持有的卡(省略图示)来识别作业者。
[0054]
另外,在上述实施方式中,示出了使用拍摄装置3来计算作业者的动作的例子,但不限于此,也可以使用拍摄装置和事件摄像机来计算作业者的动作,还可以使用拍摄装置和电波传感器来计算作业者的动作。
[0055]
另外,在上述实施方式中,除了作业者的动作以外,也可以考虑作业者的身体特征(例如身高、惯用手、手脚的长度等)来修正该作业者用的调整用数据。
[0056]
另外,在上述实施方式中,也可以从储存于存储部12的过去的作业者的动作中排除离群值。若这样构成,则能够进一步提高作业者的动作的特征的推定精度。
[0057]
另外,在上述实施方式中,也可以在计算出的预定的作业者的动作与储存于存储部12的过去的预定的作业者的动作的特征大不相同的情况下,发出警告。
[0058]
另外,在上述实施方式中,也可以根据拍摄装置3的拍摄结果来检测作业者的面部,将该检测结果与数据库进行对照,在不存在相应的作业者的情况下,作为初次进行共同作业的作业者而登记于数据库。这样,在初次进行共同作业的作业者的情况下,也可以通过读出并执行动作程序的基准程序,在机器人2中进行基准的动作(初始设定下的动作)。
[0059]
另外,在上述实施方式中,示出了识别作业者并基于各作业者的动作来修正各作业者用的动作程序的例子,但不限于此,也可以不识别作业者。在该情况下,也可以基于作业者的动作(一个作业中的时间序列上的身体的位置姿势的推移、即身体的占有空间的经时变化),在该作业的执行中修正各作业者共同的动作程序。例如,修正动作程序,以使机器人的行动计划成为最佳,以免与作业者的动作发生干涉。即,根据共同作业时的作业者的动作,即时地修正该共同作业中的之后的机器人的动作。即,也可以省略上述的图2的流程图中的步骤s3以及s7,在共同作业的执行时反复进行作业者的动作的计算以及动作程序的修正。
[0060]
另外,在上述实施方式中,也可以根据作业者的作业速度来调整机器人的作业速度。例如,也可以配合负责各作业工序的作业者的作业速度,在整个工序中调整机器人所承担的业务的处理速度。
[0061]
另外,在上述实施方式中,示出了在与预定的作业者的共同作业时使用预定的作业者用的动作程序的例子,但不限于此,也可以在与预定的作业者的共同作业时使用预定的作业者以外的作业者用的动作程序。例如,也可以对各作业者的动作进行比较,从具有相同身体特征的作业者的组中选择作业效率最高的作业者,基于该作业者用的动作程序使机器人动作。在该情况下,作业者需要配合机器人的动作,因此能够实现作业者的熟练度的提高。
[0062]
产业上的可利用性
[0063]
本发明能够利用于控制与作业者一起进行共同作业的机器人的控制装置、控制方法以及程序。
[0064]
附图标记说明
[0065]
1:控制装置(计算机);
[0066]
2:机器人;
[0067]
3:拍摄装置;
[0068]
11:运算部;
[0069]
12:存储部;
[0070]
13:输入输出部;
[0071]
100:机器人控制系统。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1