用于模块化装置的闩锁组件
背景技术:
1.诸如服务器组装的计算系统包括电子装置。例如,电子装置可以包括模块化装置。模块化装置可以插入机架中,以形成计算系统的一部分。一个或多个闩锁可以被用来将所述模块化装置固定在所述机架内。
附图说明
2.结合附图阅读下面的详细描述,将最好地理解本公开。本公开的特征在附图中通过示例而非限制性地示出,其中,相同的标号指示相同的元件,其中:
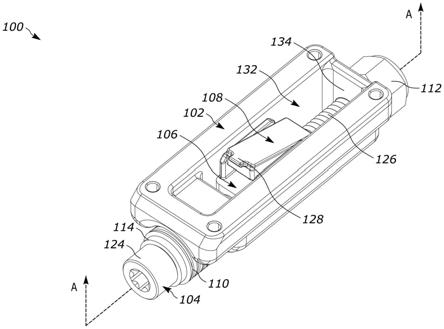
3.图1示出了根据本公开的一个或多个示例的闩锁组件;
4.图2示出了根据本公开的一个或多个示例的具有透明闩锁本体的图1的闩锁组件的视图;
5.图3示出了根据本公开的一个或多个示例的图1的闩锁组件的紧固件的平面图;
6.图4a至图4c示出了根据本公开的一个或多个示例的用于闩锁组件的多个弹簧装置配置;
7.图5示出了根据本公开的一个或多个示例的图1的闩锁组件处于第一位置状态的截面视图;
8.图6示出了根据本公开的一个或多个示例的图1的闩锁组件处于第二位置状态的截面视图;
9.图7示出了根据本公开的一个或多个示例的图1的闩锁组件处于第三位置状态的截面视图;
10.图8示出了根据本公开的一个或多个示例的包括图1的闩锁组件的电子装置的俯视图;
11.图9示出了根据本公开的一个或多个示例的具有包括图1的闩锁组件的多个电子装置的计算系统的轴侧视图;
12.图10示出了根据本公开的一个或多个示例的包括图1的闩锁组件的计算系统的简化的部分截面视图;
13.图11示出了根据本公开的一个或多个示例的闩锁组件处于图5所示的位置状态的图10所示的计算系统截面的一部分的放大视图;
14.图12示出了根据本公开的一个或多个示例的闩锁组件处于另一位置状态的图10所示的计算系统截面的一部分的放大视图;
15.图13示出了根据本公开的一个或多个示例的闩锁组件处于图6所示的位置状态的图10所示的计算系统截面的一部分的放大视图;
16.图14示出了根据本公开的一个或多个示例的闩锁组件处于图7所示的位置状态的图10所示的计算系统截面的一部分的放大视图;以及
17.图15示出了根据本公开的一个或多个示例的用于操作闩锁组件的方法的流程图。
具体实施方式
18.现在将公开请求保护的主题的说明性示例。为了清楚,本说明书中没有示出实际实施方式的所有特征。将理解的是,在任何这种实际实施方式的部署中,可以做出很多实施方式特定的决策来实现开发者的特定目的,例如,遵守将根据实施方式变化的系统相关和商业相关的约束。另外,将明白的是,这样的开发工作,即使是复杂和耗时的,对于受益于本公开的本领域普通技术人员来说也是常规的任务。
19.闩锁组件可以被用来将电子装置固定在计算系统中,例如,固定在计算系统的机架中。一些闩锁组件包括直接向电子装置施加力以将电子装置插入机架的螺钉。对于此类闩锁组件,当插入电子装置时,可能会对螺钉施加过大的扭矩,从而产生可能压碎或以其他方式损坏电子装置和/或机架的机械特征的力。
20.根据说明性示例,闩锁组件可以被设计为最小化或消除可能损坏电子装置和/或机架的机械特征的过大扭矩。在一个示例中,闩锁组件包括闩锁本体、纵向插入通过闩锁本体的紧固件、移动本体、闩锁棘爪、和弹簧装置。紧固件包括头部和柄部。柄部包括螺纹部分和第二部分,第二部分设置在螺纹部分和头部之间。移动本体螺纹连接到柄部的螺纹部分上,使得移动本体在紧固件旋转时纵向穿过螺纹部分。闩锁棘爪枢转地耦接到移动本体并且在接合和脱离闩锁本体时枢转。弹簧装置设置在头部和闩锁本体之间的柄部上。弹簧装置包围绕柄部的第二部分。
21.在闩锁组件中包括移动本体可以提供硬止动,以帮助防止螺钉上的扭矩过大。此外,在闩锁组件中包括弹簧装置允许小心地控制在插入电子装置时施加的力,以避免损坏电子装置和/或机架的机械特征。这是因为来自弹簧装置的弹簧力作用在电子装置上,以将电子装置推入机架,而不是来自螺钉的力直接作用于电子装置。此外,可以根据用于构造弹簧装置的弹簧或弹簧盘的特性来设计弹簧装置的弹簧力。
22.在闩锁组件中包括弹簧装置还允许在电子装置的连接器与机架的连接器配合后电子装置的运动。例如,当计算系统处于运行或非运行状态时,这种运动可以有助于释放冷却剂系统中积聚的流体压力。如果弹簧装置不允许运动,则电子装置和/或机架的机械特征可能会因流体压力而损坏。
23.此外,在闩锁组件中包括闩锁棘爪使得在电子装置与底盘接合和脱离时易于使用。即,闩锁棘爪可以安装在移动块上,使得闩锁棘爪在螺钉沿第一方向旋转时能够自动缩回到闩锁本体中,直到闩锁棘爪的端部与闩锁本体的表面接合为止。这可以在电子装置和机架之间产生间隙,以便从机架中插入或卸下电子装置。同样,闩锁棘爪可以安装在移动块上,使得闩锁棘爪在螺钉沿与第一方向相反的方向旋转时能够自动从闩锁本体内部延伸出来,直到闩锁棘爪的端部脱离闩锁本体的表面为止。然后,螺钉可以继续在与第一方向相反的方向旋转直到闩锁棘爪的相对端自动与机架的突起咬合,以将电子装置固定在机架内。
24.现在转到附图,图1和图2示出了根据本公开的一个或多个示例的闩锁组件100。在图2中,示出了具有透明闩锁本体的闩锁组件100,以图示出闩锁组件100的附加特征。图示出的闩锁组件100包括闩锁本体102、紧固件104、移动本体106、闩锁棘爪108、弹簧装置110、和棘爪弹簧116。
25.如图1和图2所示,移动本体106位于闩锁本体102的凹室132内。此外,移动本体106包括块部分118和从块部分118的基座122延伸的两个侧面120(仅标记出一个)。块部分118
还包括贯穿其中的螺纹孔(未示出)。
26.如图1和图2所示,紧固件104是螺钉(也可称为螺栓),紧固件具有头部124和连接到头部124的柄部126。柄部126的至少一部分包括螺纹。柄部126纵向插入通过闩锁本体102。具体地,柄部126通过移动本体106的块部分118的螺纹孔(未示出)插入。因此,移动本体106螺纹连接到紧固件104的柄部126上。
27.因此,在闩锁组件100的操作过程中,当例如,使用插入头部124的工具(未示出)使紧固件104旋转时,移动本体106线性平移通过闩锁本体102。此外,当紧固件104旋转时,紧固件104可以由闩锁组件100的紧固件(例如,螺母112)和垫圈114固定到位。如图所示,垫圈114设置在紧固件104的头部124和弹簧装置110之间。紧固件(在这种情况下是螺母)112螺纹连接到紧固件104的端部上,以将紧固件104固定到闩锁本体102中。
28.闩锁棘爪108以允许其相对于移动本体106枢转的方式安装。如图所示,闩锁棘爪108在最靠近紧固件104的头部124的一端上具有延伸构件128,并且在与延伸构件128相对的一端上具有凸轮(未示出)。闩锁棘爪108安装在移动本体106的侧面120上并安装在移动本体106的侧面120之间。在图示出的示例中,安装在闩锁棘爪108的凸轮(未示出)附近。任何合适的紧固机构可以被用来将闩锁棘爪108安装到移动本体106,包括但不限于螺钉、销、和从闩锁棘爪108延伸到侧面120的孔130中的突起。棘爪弹簧116耦接在闩锁棘爪108和块部分118的基座122之间。
29.在闩锁组件100的操作过程中,闩锁棘爪108在接合和脱离闩锁本体102时自动枢转。更具体地,响应于紧固件104在第一方向上旋转,移动本体106可以朝向移动本体106的凹室132内的表面134线性平移。当凸轮(未示出)接合表面134时,使得闩锁棘爪108朝向凹室132枢转并压缩棘爪弹簧116。该枢转和压缩使闩锁棘爪108缩回到闩锁本体102的凹室132中。
30.相反,响应于紧固件104在相反方向旋转,移动本体106可以在移动本体106的凹室132内线性平移离开表面134。当凸轮(未示出)脱离表面134时,棘爪弹簧116的弹簧力自动枢转并使闩锁棘爪108从凹室132的内部延伸出来。
31.在图1和图2中还示出,弹簧装置110包围柄部126的一部分,并且设置在头部124和闩锁本体102的外表面138之间。闩锁组件100还可以包括垫圈136。垫圈136设置在螺母112和闩锁本体102的外表面之间。
32.图3示出了根据本公开的一个或多个示例的图1的闩锁组件100的紧固件104的平面图。在该示例中,紧固件104是部分螺纹螺钉,柄部126具有螺纹部分302和设置在头部124和螺纹部分302之间的第二部分300。第二部分300没有螺纹。如304标记的线所示,螺纹耗尽点标出了柄部126的第二部分300(换句话说,无螺纹部分)和螺纹部分302之间的转变。
33.移动本体106(图3中未示出)可以螺纹连接到闩锁本体102(图3中未示出)的凹室132内的螺纹部分302上。因此,螺纹部分302的长度大于移动本体106的最大移动距离,使得紧固件104可以螺纹穿过位于闩锁本体102外部的螺母112。弹簧装置110(图3中未示出)可以定位成围绕柄部126的第二部分300。因此,第二部分300的长度大于弹簧装置110的高度。
34.在图3所示的示例紧固件104中,柄部126的部分300和302具有相同或基本相同的直径。因此,螺纹耗尽点304为移动本体106(图3中未示出)的线性移动提供了停止点。在未示出的另一示例中,紧固件104可以是带肩螺钉,其中,第二部分300是无螺纹的并且其直径
大于螺纹部分302的直径。在另一个例子中,柄部126的两个部分300和302都有螺纹并且具有相同的直径。在该示例中,具有比柄部126的两个部分300和302都大的直径的脊可以为移动本体106的线性平移提供停止点。在未示出的又一示例中,第二部分300的直径可以大于螺纹部分302的螺纹孔的直径,以提供用于移动本体106的线性平移的停止点。
35.在一个示例中,弹簧装置110包括一个或多个碟形弹簧,例如,多个堆叠的碟形弹簧。多个碟形弹簧可以是多个弹簧垫圈或多个波形弹簧。可以堆叠多个碟形弹簧以修改弹簧装置110的弹簧常数(例如,工作负载)或挠度(amount of deflection)。在另一示例中,弹簧装置110可以包括一个或多个螺旋弹簧。
36.图4a至图4c示出了根据本公开的一个或多个示例的用于闩锁组件的多个弹簧装置配置400、402、404。例如,图1和图2的闩锁组件100的弹簧装置110可以使用这三种弹簧装置配置中的一种来实施。配置400、402、和404中的每一种配置代表盘形弹簧的一种叠堆并且在特定示例中代表贝氏垫圈(belleville washers)的堆叠。根据所使用的特定配置,可以修改,例如增加弹簧装置的工作载荷或挠度中的一者或二者。
37.配置400代表多个碟形弹簧在同一方向上堆叠的“嵌套”堆叠。在嵌套堆叠中,工作载荷乘以所使用的碟形弹簧的数量,而挠度保持不变。配置402代表多个碟形弹簧在交替方向上堆叠的“反转”堆叠。在反转堆叠中,挠度乘以所使用的碟形弹簧的数量,而工作载荷保持不变。配置404代表“嵌套和反转”堆叠,其中,一些碟形弹簧组具有嵌套的堆叠配置,而其他碟形弹簧组具有反转的堆叠配置。配置404允许设计工作载荷和挠度。
38.图5至图7示出了根据本公开的一个或多个示例的图1的闩锁组件100在三种不同位置状态下通过图1中的线aa的横截面视图。每个位置状态由相对于闩锁组件100内的一个或多个部件的位置和/或状态测量的距离表示。在图5至图7所示的示例中,距离d0、d1、和d2是相对于移动本体106在闩锁本体102内的不同位置以及相对于弹簧装置110的不同压缩状态测量得出的。
39.在所示出的示例中,距离d0、d1、和d2是在闩锁本体102的外边缘502和移动本体106的边缘504之间测量的。d0用作基准距离,d1和d2可以被用来确定闩锁组件100的工作范围δd,其中δd=d1‑
d2。根据本教导,耦接在电子装置内的闩锁组件的δd可以被设计或配置成使得电子装置适当地配合在计算系统内。在特定示例中,闩锁组件的δd可以被设计或配置成使得电子装置的连接器与计算系统的机架的连接器适当地盲配合。
40.图5示出了由距离d0表示的闩锁组件100的第一位置状态。如图所示,d0为0.865”。在该第一位置状态下,紧固件104已经在第一方向上旋转,使得形成在闩锁棘爪108的端部上的凸轮500与闩锁本体102的内表面134完全接合。“完全接合”意味着闩锁棘爪108不能在闩锁本体102的凹室132内进一步枢转。因此,闩锁棘爪108“完全缩回”闩锁本体102内。另外,在该第一位置状态下,弹簧装置110处于最大减压状态。
41.图6示出了由距离d1表示的闩锁组件100的第二位置状态。如图所示,d1为1.614”。在第二位置状态下,紧固件104已经在第二方向(与第一方向相反)上旋转,使得形成在闩锁棘爪108的端部上的凸轮500完全脱离闩锁本体102的内表面134。“完全脱离”意味着闩锁棘爪108不能在闩锁本体102的凹室132外进一步枢转。由此,闩锁棘爪108从闩锁本体102内“完全延伸”出来。另外,在该位置状态下,闩锁棘爪108的延伸构件128可以与计算系统的一部分接合。例如,如稍后将说明和描述的,延伸构件128可以与来自机架的突起接合。
42.此外,在第二位置状态下,移动本体106已经移动到螺纹耗尽点304。另外,在该示例中,移动本体106的边缘504是与闩锁本体102的外边缘502的最大距离。因此,d1可以被认为是代表闩锁组件100的“最大行程”,这表示移动本体106从凹室132的一端到凹室132的另一端的行程。此外,弹簧装置110处于压缩状态,但未完全压缩。例如,该部分压缩状态对应于弹簧装置110传递将模块化装置的一个或多个连接器配合到计算系统的机架内的连接器所需的弹簧力的最大高度。在特定实施方式中,弹簧装置110的该部分压缩状态允许在连接器配合后模块化装置在机架内运动。
43.图7示出了由距离d2表示的闩锁组件100的第三位置状态。如图所示,d2为1.494”。在该第三位置状态下,移动本体106已经移动到螺纹耗尽点304。然而,弹簧装置110处于完全压缩状态,并且移动本体106不再是距闩锁本体102的外边缘502的最大距离。在一个示例中,闩锁组件100耦接到的模块化装置在机架中移动。模块化装置的移动可以使闩锁本体102朝向紧固件104的头部线性平移,从而进一步(并且在本示例中完全)压紧弹簧装置110。
44.如前所述,闩锁组件100可以耦接在电子装置内,以便于将电子装置安装在计算系统内。图8示出了根据本公开的一个或多个示例的包括图1的闩锁组件100的电子装置800的俯视图。电子装置800包括模块化装置802,该模块化装置具有与其耦接的两个闩锁组件100。闩锁组件100可以使用包括但不限于一个或多个紧固件的任何合适的固定机构固定到模块化装置802。模块化装置802可以是可插拔的计算模块、交换机模块、或光纤模块,例如,模块化装置可以插入到诸如服务器系统的计算系统中。
45.模块化装置802包括壳体804(例如,托盘)、包括在壳体804内的电路板814、以及多个连接器810和812。电路板814具有安装在其上的电子器件(未示出),并且连接器810和连接器812终止壳体804内的电子器件。电路板814的电子器件可以通过连接器810和连接器812通信地耦接到计算系统,连接器810和连接器812耦接到模块化装置802的端部808。
46.在一个示例中,连接器810是设置在模块化装置802的每个侧面上的流体耦接器。例如,一个连接器810(例如,流体耦接器)包括供应冷却剂歧管(未另外示出),供应冷却剂歧管可以从冷却剂系统(未示出)接收冷却剂以冷却电路板814上的至少一些电子器件。相应地,另一个连接器810(例如,流体耦接器)包括可以将加热后的冷却剂回流到冷却剂系统中的回流冷却剂歧管(未另行示出)。连接器812可以包括一种或多种类型的电连接器,例如,电源连接器、控制管理连接器、和/或高速连接器。
47.闩锁组件100可以耦接在模块化装置802的端部806附近的壳体804的每个侧面上。在一个示例中,可以通过模块化装置802的端部806中的开口(未示出)接近闩锁组件100的紧固件104(例如,螺钉)。开口可以穿过模块化装置802的面板。
48.图9示出了根据本公开的一个或多个示例的具有多个电子装置的计算系统900的轴侧图,其中,多个电子装置可以包括图1的闩锁组件。例如,计算系统900可以形成服务器系统的一部分或整个服务器系统。计算系统900包括具有第一端部906和第二端部908的机架902。机架902具有形成于其中且可通过机架902的端部908中的开口接近的多个狭槽904。狭槽904均可以接收计算系统900的电子装置。
49.如图9进一步所示,电子装置910已插入狭槽904之一。第二电子装置(在本示例中是图8的电子装置800)可以插入狭槽904中的另一狭槽。如图8所示,电子装置800包括两个闩锁组件100,这两个闩锁组件可以被用来将电子装置800固定在机架902中。例如,闩锁组
件100可以耦接到机架902的每个侧面上的突起914。电子装置910同样可以包括两个闩锁组件100,类似于图8所示的位置的闩锁组件,这两个闩锁组件耦接到突起914以将电子装置910固定在机架902中。
50.尽管未示出,但机架902可以包括具有一个或多个电连接器的中间板,该电连接器可以与电子装置800的连接器812和电子装置910的连接器(未示出)配合。在所图示的示例中,机架902包括耦接在机架902的端部906附近的连接器912。在特定示例中,连接器912是流体耦接器,该流体耦接器与计算系统900的冷却剂系统(未示出)流体连接。连接器912(例如,流体耦接器)可以与电子装置800的连接器810(例如,流体耦接器)和电子装置910的类似流体耦接器(未示出)配合。例如,可以操作闩锁组件100以正确地(例如,在没有过大力的情况下)使机架902的连接器与电子装置800的连接器和电子装置910的连接器盲配合,并将电子装置800和电子装置910固定到机架902中。
51.根据本教导,闩锁组件100可以被设计或配置为控制用于将电子装置插入机架中的行程和力的大小,以避免损坏电子装置和/或机架的连接器。在一个示例中,弹簧装置110的弹簧力(f
d
)、闩锁组件工作距离范围(δd)、和最大行程(d1)可以被设计或配置成避免在插入电子装置时损坏电子装置和/或机架的连接器。参考图6至图7和图10至图14,将使用这些附图描述根据本公开的配置闩锁组件的示例。
52.图10示出了根据本公开的一个或多个示例的包括图1的闩锁组件100的计算系统1000的简化截面视图。在示例中,计算系统1000是图9的计算系统900的横截面的简化表示。在该简化视图中,其中所示的闩锁组件100的尺寸相对于计算系统1000的其余部分被放大。
53.如图所示,计算系统1000包括插入机架1004中的电子装置1002。电子装置1002包括附接至电子装置1002的侧面的两个闩锁组件100。闩锁组件100与来自机架1004的各侧面的突起1006接合,以将电子装置1002固定到机架1004中。突起1006可以是机架1004的压花边缘。
54.图11至图14示出了根据本公开的一个或多个示例的在闩锁组件100处于四种不同位置状态的情况下,图10所示的计算系统1000横截面的部分1008的放大视图。以下关于包括在计算系统的部分1008中的闩锁组件100的描述同样适用于计算系统1000的另一闩锁组件。
55.图11示出了处于图5所示的位置状态的闩锁组件100,其中,闩锁棘爪108完全缩回在闩锁本体102内。因此,电子装置1002的边缘1100在机架1004的端部1102之外或外部延伸0.68”。在特定示例中,该位置状态可以对应于电子装置1002的连接器最初与机架1004的连接器接合。此外,在该位置状态下,可以例如,使用插入头部124中的螺丝刀沿第一方向旋转紧固件104,以进一步将电子装置1002插入机架1004中。
56.图12示出了处于另一位置状态的闩锁组件100。例如,当紧固件104在第一方向继续旋转时,移动本体106线性地穿过紧固件104的柄部126的螺纹部分,直到闩锁棘爪108从闩锁本体108完全伸出,并且闩锁棘爪108的延伸构件128与机架1004的突起1006(例如,凸棱)接合。在该位置状态下,电子装置1002已行进0.05”进入机架1004。因此,电子装置1002的边缘1100在机架1004的端部1102之外或外部延伸0.63”。
57.图13示出了当紧固件104在第一方向继续旋转时,闩锁组件100到达图6所示的位置状态。例如,该位置状态可以对应于电子装置1002的连接器与机架1004的连接器完全配
合。“完全配合”意味着连接器准备好在电子装置1002和机架1004之间进行通信,例如,电气和流体通信。在该位置状态下,由于移动本体106的边缘504已经到达螺纹耗尽点304,因此紧固件104不可能在第一方向上进一步旋转。此外,在该位置状态下,电子装置1002的边缘1100在机架1004的端部1102的内部延伸0.15”。
58.图14示出了处于图7所示的位置状态的闩锁组件100,其中,弹簧装置110处于最大压缩状态。如图所示,在该位置状态下,电子装置1002已经移回机架1004的端部1102。如图所示,在该位置状态下,电子装置1002的边缘1100在机架1004的端部1102的内部延伸0.03”。闩锁组件100的示例优点是,包括弹簧装置110允许电子装置在其连接器与计算系统的机架的连接器配合后运动。当计算系统(例如,计算系统900)处于可操作或不可操作状态时,这种运动是有益的。即使模块化装置和机架连接器之间可能存在显著的位置公差,通过允许连接器从底部向外移动,这种运动也可以导致配合的连接器的位置公差。
59.在一个示例中,计算系统900可以运行在例如,数据中心中。在操作时,计算系统900可以连接到冷却剂系统,该冷却剂系统循环冷却剂以冷却计算系统的各种电子器件,例如,安装到电子装置800的电路板814的电子器件。在某些情况下,冷却剂系统可能发生故障,例如膨胀箱中的故障,并导致电子装置800和机架902之间的液体偶合器中的压力积聚。弹簧装置110允许电子装置800在机架902内运动以释放压力积聚,而不会使压力破坏液体耦接(或可包括在冷却剂系统中的流体管道和/或密封件)。
60.在另一示例中,计算系统900可能处于不可操作状态,例如,在计算系统900的装运期间。在特定场景中,计算系统在冷却剂系统中存在冷却剂的情况下被运输。环境温度的变化可能导致冷却剂膨胀,从而导致电子装置800和机架902之间的液体偶合器中的压力积聚。同样,代替压力损坏液体耦接,弹簧装置110允许电子装置800在机架902内运动以释放压力积聚。
61.根据本教导的闩锁组件的另一示例优点是易于将电子装置从计算系统(例如,从机架)分离。例如,为了使电子装置从机架分离,只需旋转紧固件,直到闩锁棘爪的凸轮与闩锁本体接合,从而使闩锁棘爪缩回闩锁本体中。这就为从底盘上拆卸电子装置留出了空间。
62.遵循一些设计参数有助于设计允许电子装置的连接器和计算系统的连接器(例如,计算系统的机架的连接器)之间完全配合的闩锁组件,例如,闩锁组件100,而不会损坏计算系统。在特定实例中,可以使用计算机辅助设计(“cad”)系统来设计闩锁组件100。
63.对于一个参数,闩锁组件工作距离范围(δd)大于或等于对于一个参数,闩锁组件工作距离范围(δd)大于或等于是确保电子装置的连接器与机架的连接器完全配合的位置公差。在参考图13至图14示出的示例中,连接器与机架的连接器完全配合的位置公差。在参考图13至图14示出的示例中,在参考图6至图7示出的示例中,δd=1.614
“‑
1.494”=.12”(等于)。
64.对于另一个参数,闩锁组件的最大行程距离(d1)大于连接器接合耦接距离。在参考图11和图13示出的示例中,连接器接合耦接距离为0.68
”‑
(
‑
0.15”)=0.83”。在参考图5至图6示出的示例中,d1=1.614”(大于0.83”)。
65.对于另一个参数,d1=f
d1
处的力大于或等于f
min
=(f1+f2+f3…
+f
n
)/2。在这个等式中,f
min
表示确保电子装置的连接器与机架的连接器完全配合所需的最小插入力。此外,f
n
表示给定连接器耦接的力。电子装置和机架之间的所有连接器耦接的所有力加在一起,这也可能包括摩擦和电磁干扰(“emi”)垫圈力。对于附加参数,最大弹簧装置力或d2=f
d2
处的
力大于f
max
。f
max
表示避免压碎或损坏电子装置和/或机架的连接器或其他机械部件的最大允许插入力。在参考图10至图14示出的示例中,使f
min
=40lbf,f
max
=75lbf。对于另一个参数,弹簧装置在d1处的挠度和弹簧装置在d2处的挠度之间的差值(在本文中也称为余量)大于或等于此外,该余量还提供了电子装置在机架内的充分运动。足够的运动可以至少部分地取决于在计算装置运行和不运行时由于冷却剂的膨胀产生的预期最大力或压力。
66.可以根据用于构造弹簧装置110的碟形弹簧或弹簧圈的特性来设计弹簧装置110的余量f
min
和f
max
。在使用贝氏垫圈(belleville washers)构造弹簧装置110的示例中,可以使用下表设计弹簧装置110的余量f
min
和f
max
以满足上述参数。表中的每行表示特定贝氏垫圈的一组特性。
[0067][0068]
在f
min
=40lbf和f
max
=75lbf的示例中,弹簧装置110可以被设计为具有来自上表第一行的15个贝氏垫圈,这些垫圈以反转的堆叠配置排列。这种设计具有45lbf的工作载荷和70lbs的平(或最大)载荷,对于电子装置800和机架902之间的连接器耦接,其分别大于f
min
和小于f
max
。该设计进一步在工作荷载(即d1处的挠度)下产生0.120”的挠度,在平荷载(即d2处的挠度)下产生0.232”的挠度。因此,该设计产生0.112”的余量,该余量大于或等于电子装置800和机架902之间的连接器耦接的
[0069]
图15示出了根据本公开的一个或多个示例的用于操作闩锁组件的方法1500的流程图。将参考图1至图2、图5至图7、和图11至图14所示的闩锁组件100的操作来描述方法1500。在诸如电子装置1002之类的电子装置包含多个闩锁组件100的情况下,可以对每个闩锁组件100执行方法1500。
[0070]
在块1502,响应于螺纹地通过移动本体106的紧固件104的旋转,使移动本体106线性平移。如图12所示,当紧固件104继续旋转时,响应于闩锁棘爪108的凸轮500脱离闩锁本体102并且响应于棘爪弹簧116的弹簧力,使闩锁棘爪108从闩锁本体102内延伸出来(1504)。当移动本体106进一步线性平移时,闩锁棘爪108的延伸构件128与机架1004的突起1006接合(1506),也如图12所示。如图13所示,当移动本体106到达紧固件104的螺纹耗尽点304时,线性平移(和紧固件104的旋转)停止(1508)。当处于图13所示的位置状态时,例如,如图14所示,可以进一步压缩(1510)弹簧装置110,以允许电子装置1002在机架1004中运动。
[0071]
为了从机架1004上移除电子装置1002,例如,响应于紧固件104在相反的旋转方向
旋转,使移动本体106在相反方向线性平移(1512)。当移动本体106在相反方向上进一步线性平移时,闩锁棘爪108的延伸构件128脱离(1514)机架1004的突起1006。当闩锁棘爪108的凸轮500与闩锁本体102接合时,凸轮500使得闩锁棘爪108枢转到闩锁本体102中。当闩锁棘爪108缩回时,可以从底盘1004移除电子装置1002。
[0072]
此外,本文使用的条款“一”在专利技术中具有其一般含义,即“一个或多个”。在本文中,术语“大约”在被应用于某个值时通常指在用于产生该值的设备的公差范围内,或者在一些示例中,指加上或减去10%,或者加上或减去5%,或者加上或减去1%,除非另有明确规定。此外,本文中所使用的术语“基本”是指多数、几乎全部、或全部、或具有约51%到约100%范围的量。此外,本文中的示例意图仅是说明性的,并且呈现用于讨论目的而不是作为限制。
[0073]
出于解释的目的,前面的描述使用了特定的术语来提供对本发明的透彻理解。然而,对于本领域技术人员来说显而易见的是,为了实施本文所描述的系统和方法,不需要具体细节。为了说明和描述的目的,给出了具体示例的上述描述。它们并不意图穷尽所描述的精确形式或将本公开限制到所描述的精确形式。显然,根据上述教导,许多修改和变化是可能的。示出和描述这些示例是为了最好地解释本公开的原理和实际应用,从而使本领域其他技术人员能够最好地利用本公开和各种示例并对其进行各种修改,以适合预期的特定用途。本公开的范围旨在由以下权利要求及其等同限定。
- 该技术已申请专利。仅供学习研究,如用于商业用途,请联系技术所有人。
- 技术研发人员:M
- 技术所有人:慧与发展有限责任合伙企业
- 我是此专利的发明人
- 该领域下的技术专家
- 如您需求助技术专家,请点此查看客服电话进行咨询。
- 1、平老师:1.功能涂层设计与应用 2.柔性电子器件设计与应用 3.结构动态参数测试与装置研发 4.智能机电一体化产品研发 5.3D打印工艺与设备
- 2、潘老师:1.机电一体化装备及其控制技术 2.多传感器信息融合与质量评定
- 3、王老师:机械制造
- 4、袁老师:1.薄膜气敏传感器 2.薄膜太阳能电池
- 5、李老师:新型电力电子技术在微网中的应用
- 如您是高校老师,可以点此联系我们加入专家库。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1
精彩留言,会给你点赞!
专利分类正在加载中....