一种重卡双机械手快速换电系统的制作方法
一种重卡双机械手快速换电系统
[技术领域]
[0001]
本发明涉及换电机械手设备技术领域,尤其涉及一种结构设计合理,应用效果突出,换电效率较高的重卡双机械手快速换电系统。
[
背景技术:
]
[0002]
近些年,随着电动汽车的逐渐普及和快速发展,汽车的电动化趋势越发明显,技术也得到了很大程度的提升。
[0003]
目前电动小汽车是消费主流,的士车、私家车等小型汽车的电动化较为广泛,然而,重卡方面的换电也需要进行配套的改进和更新,为了更好的实现重卡卡车的电动化和换电便利化,需要对换电平台进行更加简易的设计,便于适应更多的使用场合。
[0004]
基于此,需要在换电平台的具体构造以及换电方式、换电零部件等方面进行改进和改善,尤其是在换电机器人的结构部分等,本领域的技术人员也进行了大量的研发与实验,取得了较好的成绩。
[
技术实现要素:
]
[0005]
为克服现有技术所存在的问题,本发明提供一种结构设计合理,应用效果突出,换电效率较高的重卡双机械手快速换电系统。
[0006]
本发明解决技术问题的方案是提供一种重卡双机械手快速换电系统,包括动力控制箱体、安设于所述动力控制箱体上的货叉旋转箱体以及处于所述货叉旋转箱体顶部的辅助功能箱体;在所述辅助功能箱体顶部以及所述动力控制箱体底部都设置有导轨;所述货叉旋转箱体包括并列设置的第一旋转箱和第二旋转箱;所述第一旋转箱与所述第二旋转箱通过中间部位的旋转轴相连接;且所述旋转轴的两端分别与所述动力控制箱体、所述辅助功能箱体活动连接;所述第一旋转箱中设置有第一程控升降装置、第一平移导轨机构、第一换电箱体;所述第二旋转箱中设置有第二程控升降装置、第二平移导轨机构以及第二换电箱体;所述第一换电箱体、第二换电箱体正面都安设有锁固杆以及导向定位杆。
[0007]
优选地,所述第一换电箱体、第二换电箱体正面还设置有用于感应感测间距大小的测距传感器;所述测距传感器为超声波、红外、雷达测距传感器。
[0008]
优选地,所述第一程控升降装置、所述第二程控升降装置结构相同;所述第一程控升降装置包括与所述第一旋转箱底部相连接的剪叉式抬升组件;所述剪叉式抬升组件包括抬升杆、用于驱动所述抬升杆升降的驱动机构以及齿轮换向器;所述抬升杆底部通过一相对设置的转动轴与所述第一旋转箱内侧活动连接;所述齿轮换向器通过连接绳与所述抬升杆相连接,用于带动所述抬升杆升降。
[0009]
优选地,所述第一平移导轨机构与所述第二平移导轨机构结构相同;所述第一平移导轨机构包括导轨基座以及可相对于所述导轨基座滑出滑进的伸缩导轨段;所述第一换电箱体与所述伸缩导轨段前端部位相连接。
[0010]
优选地,所述第一换电箱体与所述伸缩导轨段的前端部位通过浮动式结构相连
接。
[0011]
优选地,所述第一换电箱体内部设置有用于驱动所述锁固杆上下移动的驱动电机;且在所述第一换电箱体外侧、所述锁固杆的上下侧部位分别设置有上到位传感器、下到位传感器。
[0012]
优选地,所述动力控制箱体与所述货叉旋转箱体通过中间部位的旋转盘或电刷滑环相连接。
[0013]
优选地,所述锁固杆处于所述第一换电箱体上侧部位;所述导向定位杆处于所述第一换电箱体下侧部位;且所述锁固杆、导向定位杆的数量都为两根,左右对称设置。
[0014]
优选地,所述锁固杆、导向定位杆分别安设于所述第一换电箱体正面的四个对角部位。
[0015]
优选地,所述动力控制箱体中设置有用于驱动所述货叉旋转箱体绕所述旋转轴转动的驱动电机。
[0016]
与现有技术相比,本发明一种重卡双机械手快速换电系统通过同时设置动力控制箱体13、安设于所述动力控制箱体13上的货叉旋转箱体12以及处于所述货叉旋转箱体12顶部的辅助功能箱体11,在所述辅助功能箱体11顶部以及所述动力控制箱体13底部都设置有导轨,货叉旋转箱体12包括并列设置的第一旋转箱121和第二旋转箱122,第一旋转箱121与所述第二旋转箱122通过中间部位的旋转轴相连接,且所述旋转轴的两端分别与所述动力控制箱体13、所述辅助功能箱体11活动连接,第一旋转箱121中设置有第一程控升降装置125、第一平移导轨机构126、第一换电箱体123,第二旋转箱122中设置有第二程控升降装置、第二平移导轨机构以及第二换电箱体124,第一换电箱体123、第二换电箱体124正面都安设有锁固杆1231以及导向定位杆1234,实际应用过程中,由于存在两套独立机械手,一个取新电池,一个换旧电池,通过短距离交替实现快速换电,提高一倍效率,本申请的结构设计合理,应用效果突出。
[附图说明]
[0017]
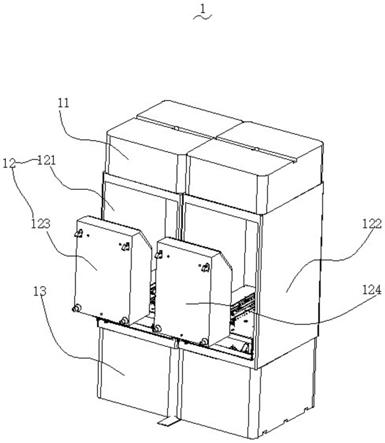
图1和图2是本发明一种重卡双机械手快速换电系统的立体状态结构示意图。
[具体实施方式]
[0018]
为使本发明的目的,技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用于解释本发明,并不用于限定此发明。
[0019]
请参阅图1和图2,本发明一种重卡双机械手快速换电系统1包括动力控制箱体13、安设于所述动力控制箱体13上的货叉旋转箱体12以及处于所述货叉旋转箱体12顶部的辅助功能箱体11;在所述辅助功能箱体11顶部以及所述动力控制箱体13底部都设置有导轨;所述货叉旋转箱体12包括并列设置的第一旋转箱121和第二旋转箱122;所述第一旋转箱121与所述第二旋转箱122通过中间部位的旋转轴相连接;且所述旋转轴的两端分别与所述动力控制箱体13、所述辅助功能箱体11活动连接;所述第一旋转箱121中设置有第一程控升降装置125、第一平移导轨机构126、第一换电箱体123;所述第二旋转箱122中设置有第二程控升降装置、第二平移导轨机构以及第二换电箱体124;所述第一换电箱体123、第二换电箱
体124正面都安设有锁固杆1231以及导向定位杆1234。
[0020]
本申请通过同时设置动力控制箱体13、安设于所述动力控制箱体13上的货叉旋转箱体12以及处于所述货叉旋转箱体12顶部的辅助功能箱体11,在所述辅助功能箱体11顶部以及所述动力控制箱体13底部都设置有导轨,货叉旋转箱体12包括并列设置的第一旋转箱121和第二旋转箱122,第一旋转箱121与所述第二旋转箱122通过中间部位的旋转轴相连接,且所述旋转轴的两端分别与所述动力控制箱体13、所述辅助功能箱体11活动连接,第一旋转箱121中设置有第一程控升降装置125、第一平移导轨机构126、第一换电箱体123,第二旋转箱122中设置有第二程控升降装置、第二平移导轨机构以及第二换电箱体124,第一换电箱体123、第二换电箱体124正面都安设有锁固杆1231以及导向定位杆1234,实际应用过程中,由于存在两套独立机械手,一个取新电池,一个换旧电池,通过短距离交替实现快速换电,提高一倍效率,本申请的结构设计合理,应用效果突出。
[0021]
在一较优实施例中,所述第一换电箱体123、第二换电箱体124正面还设置有用于感应感测间距大小的测距传感器;所述测距传感器为超声波、红外、雷达测距传感器。
[0022]
在一较优实施例中,所述第一程控升降装置125、所述第二程控升降装置结构相同;所述第一程控升降装置125包括与所述第一旋转箱121底部相连接的剪叉式抬升组件;所述剪叉式抬升组件包括抬升杆、用于驱动所述抬升杆升降的驱动机构以及齿轮换向器;所述抬升杆底部通过一相对设置的转动轴与所述第一旋转箱121内侧活动连接;所述齿轮换向器通过连接绳与所述抬升杆相连接,用于带动所述抬升杆升降。
[0023]
在一较优实施例中,所述第一平移导轨机构126与所述第二平移导轨机构结构相同;所述第一平移导轨机构126包括导轨基座以及可相对于所述导轨基座滑出滑进的伸缩导轨段;所述第一换电箱体123与所述伸缩导轨段前端部位相连接。
[0024]
在一较优实施例中,所述第一换电箱体123与所述伸缩导轨段的前端部位通过浮动式结构相连接。
[0025]
在一较优实施例中,所述第一换电箱体123内部设置有用于驱动所述锁固杆1231上下移动的驱动电机;且在所述第一换电箱体123外侧、所述锁固杆1231的上下侧部位分别设置有上到位传感器1232、下到位传感器1233。
[0026]
在一较优实施例中,所述动力控制箱体13与所述货叉旋转箱体12通过中间部位的旋转盘或电刷滑环相连接。
[0027]
在一较优实施例中,所述锁固杆1231处于所述第一换电箱体123上侧部位;所述导向定位杆1234处于所述第一换电箱体123下侧部位;且所述锁固杆1231、导向定位杆1234的数量都为两根,左右对称设置。
[0028]
在一较优实施例中,所述锁固杆1231、导向定位杆1234分别安设于所述第一换电箱体123正面的四个对角部位。
[0029]
在一较优实施例中,所述动力控制箱体13中设置有用于驱动所述货叉旋转箱体12绕所述旋转轴转动的驱动电机。
[0030]
与现有技术相比,本发明一种重卡双机械手快速换电系统1通过同时设置动力控制箱体13、安设于所述动力控制箱体13上的货叉旋转箱体12以及处于所述货叉旋转箱体12顶部的辅助功能箱体11,在所述辅助功能箱体11顶部以及所述动力控制箱体13底部都设置有导轨,货叉旋转箱体12包括并列设置的第一旋转箱121和第二旋转箱122,第一旋转箱121
与所述第二旋转箱122通过中间部位的旋转轴相连接,且所述旋转轴的两端分别与所述动力控制箱体13、所述辅助功能箱体11活动连接,第一旋转箱121中设置有第一程控升降装置125、第一平移导轨机构126、第一换电箱体123,第二旋转箱122中设置有第二程控升降装置、第二平移导轨机构以及第二换电箱体124,第一换电箱体123、第二换电箱体124正面都安设有锁固杆1231以及导向定位杆1234,实际应用过程中,由于存在两套独立机械手,一个取新电池,一个换旧电池,通过短距离交替实现快速换电,提高一倍效率,本申请的结构设计合理,应用效果突出。
[0031]
以上所述的本发明实施方式,并不构成对本发明保护范围的限定。任何在本发明的精神和原则之内所作的修改、等同替换和改进等,均应包含在本发明的权利要求保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1