一种基于摇杆手柄的空间机械臂遥操作控制方法
1.本公开涉及机械臂控制领域,特别涉及一种基于摇杆手柄的空间机械臂遥操作控制方法。
背景技术:
2.遥操作技术(主从操作技术)和机器人技术相结合,能够有效解决现有机器人难以完成复杂任务的问题。主从遥操作技术能够将由操作人员远程参与任务,将分析能力与机器相结合。不仅能解决目前计算机技术不够成熟而导致的完全主动式机器人不够智能的问题,而且可以代替人工作业,减轻人工作业劳动强度。
3.发明人发现,目前使用的遥操作方式通常是使用与从机械臂拓扑结构相同,只是比例大小不同的主机械臂进行遥操作控制;或是使用多自由度手柄作为主机械臂对从机械臂进行遥操作控制;一些通过手柄进行空间机械臂遥操作控制时,以机械臂末端固定坐标系相对于机械臂基座坐标系的角速度作为手柄的姿态控制输出,此方法虽然物理意义明确,但存在空间机械臂末端位姿控制时,由于结构复杂产生的奇异问题,难以对关节奇异姿态进行有效调整;并且,在解算机械臂关节动作时,复杂的算法会影响机械臂的响应速度。
技术实现要素:
4.本公开的目的是针对现有技术存在的缺陷,提供一种基于摇杆手柄的空间机械臂遥操作控制方法,利用多关节联动和单关节独立运动两种模式,简化空间机械臂的遥操作规划复杂程度,单关节独立运动作为关节联动模式的补充,通过单关节独立控制,解决关节奇异姿态问题。
5.本公开的第一目的是提供一种基于摇杆手柄的空间机械臂遥操作控制方法,采用以下技术方案:
6.包括以下步骤:
7.基于机械臂关节联动建立手柄动作与机械臂动作的映射,依据输入手柄的运动信号,获取机械臂竖动、平动、转动自由度的关节角度信息,得到机械臂关节的联动执行信号;
8.基于机械臂关节独立运动建立手柄动作与机械臂关节的映射,依据输入手柄的运动信号,获取机械臂部分关节的角度信息,得到机械臂关节的独立执行信号;
9.切换机械臂关节联动和机械臂关节独立运动,输出联动执行信号或独立执行信号至机械臂。
10.进一步地,建立参考直角坐标系,建立机械臂相对于参考坐标系yoz平面与遥杆手柄的竖动自由度映射,建立机械臂相对于参考坐标系xoy平面与遥杆手柄的平动自由度映射,建立机械臂相对于参考坐标系xoz平面与遥杆手柄的转动自由度映射。
11.进一步地,还包括建立机械臂手爪开合与手柄的映射。
12.进一步地,根据输入手柄的运动信号在手柄坐标系的映射,得到机械臂竖动、平动、转动自由度关节角度信息;其中手柄坐标系包括手柄俯仰坐标系、手柄偏航坐标系和手
柄滚动坐标系。
13.进一步地,所述竖动自由度关节包括大臂俯仰关节、小臂俯仰关节和腕部俯仰关节。
14.进一步地,所述平动自由度关节包括腰部回转关节和腕部摆动关节。
15.进一步地,所述转动自由度关节为手爪回转关节。
16.进一步地,机械臂关节独立运动时:
17.建立第一手柄坐标系x方向与腰部回转关节的映射;
18.建立第一手柄坐标系y方向与大臂俯仰关节的映射;
19.建立第二手柄坐标系x方向与腕部俯仰关节的映射;
20.建立第二手柄坐标系y方向与腕部摆动关节的映射。
21.进一步地,机械臂关节独立动作作为机械臂联动动作的补充,对机械臂的部分关节进行独立控制。
22.进一步地,获取输入手柄的运动信号包括:第一手柄的两轴行程数据、第二手柄的两轴行程数据。
23.与现有技术相比,本公开具有的优点和积极效果是:
24.(1)利用多关节联动和单关节独立运动两种模式,简化空间机械臂的遥操作规划复杂程度,单关节独立运动作为关节联动模式的补充,通过单关节独立控制,解决关节奇异姿态问题;
25.(2)将多关节联动模式将空间机械臂的动作分为竖动、平动和转动三组动作,将竖动、平动和转动互相解耦,运动控制简单可靠,物理意义明确,占用资源较少,相比于传统的姿态映射方法,对指定自由度进行角度限制,空间机械臂姿态运动不存在奇异问题。
附图说明
26.构成本公开的一部分的说明书附图用来提供对本公开的进一步理解,本公开的示意性实施例及其说明用于解释本公开,并不构成对本公开的不当限定。
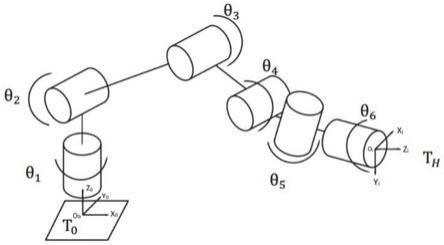
27.图1为本公开实施例1中六自由度机械臂结构及坐标系示意图;
28.图2为本公开实施例1中双摇杆手柄坐标系示意图。
具体实施方式
29.实施例1
30.本公开的一种典型的实施方式中,如图1
‑
图2所示,提出了一种基于摇杆手柄的空间机械臂遥操作控制方法。
31.多自由度空间机械臂控制方法中,
r
t
h
=a1a2…
a
i
为机械臂末端相对于机械臂参考坐标系的变换矩阵,将机械臂的自由度设定为竖动自由度、平动自由度和转动自由度。
32.在直角坐标系里建立机械臂相对于参考坐标系平面与遥杆手柄的自由度映射,建立的直角坐标系内通过机械臂的逆运动学分析,对机械臂的各个自由度角度进行设置限定关系,完成空间机械臂的遥操作规划。
33.在本实施例中,以六自由度机械臂为例,六自由度机械臂包括六个转动关节:腰部回转关节、大臂俯仰关节、小臂俯仰关节、腕部俯仰关节、腕部摆动关节和手爪回转关节。
34.采用双摇杆操作手柄,手柄包括两个遥杆、开关按键和模式切换按键,每个遥杆有两个自由度,在机械臂位于初始位置时,遥杆位于零动作位置。
35.基于摇杆手柄的空间机械臂遥操作控制方法,包括机械臂多关节联动和单关节独立动作两种模式,机械臂的两种遥操作模式可通过遥杆手柄的模式切换按键进行切换。
36.两种操作模式之一的空间机械臂遥操作关节联动模式操作控制方法,包括以下步骤:
37.建立六自由度机械臂相对于参考坐标系yoz平面与遥杆手柄的竖直自由度映射。
38.建立六自由度机械臂相对于参考坐标系xoy平面与遥杆手柄的平面自由度映射。
39.建立六自由度机械臂相对于参考坐标系xoz平面与遥杆手柄的转动自由度映射。
40.建立六自由度机械臂手爪开合与手柄的映射。
41.根据遥杆手柄俯仰坐标系的输出,生成机械臂竖动自由度的关节角度信息,根据遥杆手柄边行坐标系的输出,生成机械臂平动自由度的关节角度信息,根据遥杆手柄滚动坐标系的输出,生成机械臂转动自由度的关节角度信息。
42.得到各个关节的位置后,即可完成空间机械臂遥操作控制。
43.进一步的,上述竖动自由度包括:大臂俯仰关节、小臂俯仰关节和腕部俯仰关节。
44.进一步的,建立遥杆手柄与机械臂竖动自由度映射的方法为:
45.相对于机械臂底座建立的参考坐标系,机械臂手爪和基座之间的运动学变换为
r
t
h
=a1a2a3a4a5a646.进一步的,变换矩阵
[0047][0048]
其中,变换矩阵a2、a3、a4为竖动自由度映射的变换矩阵。
[0049]
其中:
[0050]
如图1所示,θ2、θ3、θ4分别为大臂俯仰关节、小臂俯仰关节和腕部俯仰关节相对于机械臂零位置的关节角度。
[0051]
所述机械臂零位置为当θ2、θ3、θ4分别位于其相对于机械臂初始位姿的最大值和最小值的中间值的位姿。
[0052]
如θ
2max
+θ
2min
=0
°
,其中θ2、θ3、θ4关节活动范围为
‑
90
°
至90
°
。即初始位姿的关节角度为0
°
。
[0053]
进一步的,在联动模式下,使用一号遥杆手柄y方向进行机械臂竖动自由度的遥操作控制。
[0054]
在给定的初始姿态坐标系下,在进行遥操作的过程中,如果通过联动模式使机械
臂的位姿到达,则有
[0055][0056]
则θ2、θ3、θ4可以表示为
[0057][0058][0059]
θ4=θ
234
‑
θ2‑
θ3[0060]
进一步的,在遥杆手柄进行机械臂的遥操作控制时,机械臂的竖动自由度的三个自由度的解θ2、θ3、θ4会存在有多个组合的情况,在多个解中,机械臂的竖动自由度遥操作应选取|θ2|+|θ3|+|θ4|的最小值。
[0061]
进一步的,
r
t
h
=a1a2a3a4a5a6当a1、a5、a6保持不变时,t
p
为机械臂手爪的竖动自由度输出。
[0062]
其中,a1、a5为平动自由度映射的变换矩阵,
[0063][0064]
其中,θ1、θ5分别为腰部回转关节、腕部俯仰关节相对于机械臂零位置的关节角度。
[0065]
进一步的,如上述机械臂零位置所述机械臂零位置为当θ1、θ5分别位于其最大值和最小值的中间值的位姿。
[0066]
进一步的,在联动模式下,使用一号遥杆手柄x方向进行机械臂平动自由度的遥操作控制。
[0067][0068][0069]
进一步的,在机械臂平动自由度遥操作规划过程中,相对于机械臂的初始位姿θ1和θ5的角度应为同号,即相对于初始位姿坐标系,偏航角度θ1和θ5应同为正方向即相对于关节坐标系z轴顺时针转动,或同为负方向。
[0070]
其中,a6为转动自由度映射的变换矩阵,
[0071][0072]
进一步的,在联动模式下,使用二号遥杆手柄x方向进行机械臂转动自由度的遥操作控制。使用二号遥杆手柄y方向进行机械臂俯机械手爪开合遥操作控制。
[0073]
将多关节联动模式将空间机械臂的动作分为竖动、平动和转动三组动作,将竖动、平动和转动互相解耦,运动控制简单可靠,物理意义明确,占用资源较少,相比于传统的姿态映射方法,对指定自由度进行角度限制,空间机械臂姿态运动不存在奇异问题。
[0074]
通过位于遥杆手柄的模式切换按键进行模式切换,切换至机械臂单关节独立动作模式。
[0075]
两种操作模式之一的空间机械臂遥操作关节独立运动模式操作控制方法,作为关节联动模式的补充,包括以下步骤:
[0076]
建立基于第一摇杆坐标系x方向与机械臂腰部回转关节的遥操作映射。
[0077]
建立基于第一摇杆坐标系y方向与机械臂大臂俯仰关节的遥操作映射。
[0078]
建立基于第二摇杆坐标系x方向与机械臂腕部俯仰关节的遥操作映射。
[0079]
建立基于第二遥感坐标系y方向与机械臂腕部摆动关节的遥操作映射。
[0080]
进一步的,第一摇杆坐标系x方向与机械臂腰部回转关节的遥操作映射的建立方法为:摇杆位于初始状态时,机械臂的腰部回转关节相应的位于机械臂的初始位姿。一号摇杆的正行程相应于机械臂的腰部回转关节的正角度回转,负行程相应于机械臂的腰部回转关节的负角度回转。
[0081]
其中,腰部回转关节的正负回转行程均匀的分布于第一摇杆坐标系x方向的正负行程。
[0082]
进一步的,第一摇杆坐标系y方向与机械臂大臂俯仰关节的遥操作映射的建立方法为:摇杆位于初始状态时,机械臂的大臂俯仰关节相应的位于机械臂的初始位姿。一号摇杆的y方向的正行程相应于机械臂的大臂俯仰关节的正角度回转,负行程相应于机械臂的大臂俯仰关节的负角度回转。
[0083]
其中,大臂俯仰关节的正负回转行程均匀的分布于第一摇杆坐标系y方向的正负行程。
[0084]
进一步的,第二摇杆坐标系x方向与机械臂腕部俯仰关节的遥操作映射的建立方法为:摇杆位于初始状态时,机械臂的腕部俯仰关节相应的位于机械臂的初始位姿。第二摇杆的正行程相应于机械臂的腕部俯仰关节的正角度回转,负行程相应于机械臂的腕部俯仰关节的负角度回转。
[0085]
其中,腕部俯仰关节的正负回转行程均匀的分布于第二摇杆坐标系x方向的正负行程。
[0086]
进一步的,第二摇杆坐标系y方向与机械臂腕部摆动关节的遥操作映射的建立方法为:摇杆位于初始状态时,机械臂的腕部摆动关节相应的位于机械臂的初始位姿。第二摇杆的正行程相应于机械臂的腕部摆动关节的正角度回转,负行程相应于机械臂的腕部摆动关节的负角度回转。
[0087]
其中,腕部摆动关节的正负回转行程均匀的分布于第二摇杆坐标系y方向的正负行程。
[0088]
利用多关节联动和单关节独立运动两种模式,简化空间机械臂的遥操作规划复杂程度,单关节独立运动作为关节联动模式的补充,通过单关节独立控制,解决关节奇异姿态问题。
[0089]
以上所述仅为本公开的优选实施例而已,并不用于限制本公开,对于本领域的技术人员来说,本公开可以有各种更改和变化。凡在本公开的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本公开的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1