一种柔性施工工具头及卸力机构的制作方法
1.本发明涉及机械臂及其它运动机构用弯折粗钢筋等的工具头技术领域。
背景技术:
2.钢筋弯曲、曲面打磨等是建筑施工领域重要的组成部分,也是不可或缺的工艺。目前市场现有的落地式钢筋弯曲机已经相当成熟且效率比较高,但对于钢筋弯曲复杂形状、复杂曲率的柔性钢筋弯折的设备及工艺鲜有满足。而基于bim建造工艺方向的先锋造型建筑及装置需要更复杂的钢筋骨架进行配合,从而达到建筑领域结构强度,满足大承载的结构力学以及抗震要求。大尺度的曲面打磨设备现阶段有较达大的空缺,主要构型为龙门式的cnc设备,造价昂贵,也需要一种更经济的打磨方式。而机械臂因为其通用价格较低,又具备生产柔性的特点,可以支持上述的加工需求。
3.用于弯折粗钢筋的液压缸为大于等于φ60mm缸径的高压液压缸,理论最大输出力为20吨以上。基于机械臂的钢筋弯折工具头,在液压缸弯折钢筋时,由于工艺特点会引起自身整体旋转,导致液压缸所受的钢筋作用反力通过钢性结构传递到运动执行机构如机械臂本体,导致机械臂报警,甚至于损坏机械臂的情况时有发生。打磨时,因为工件表面可能出现的粗糙与毛刺,末端砂盘快速旋转中,遇大阻力表面,也会出现上述超机械臂末端扭矩的情况。
4.基于此,需要一种能应用于机械臂或者其它运动机构、满足大承载的结构力学以及抗震要求的末端工具头。
技术实现要素:
5.本发明的目的就是为了解决现有技术中存在的问题,提供一种能即时卸力弯折粗钢筋或打磨用的工具头。
6.为了达到上述目的,本发明采取的技术方案如下:
7.一种卸力机构,包括上法兰盘、弹簧固定座、复位弹簧、连接杆、关节轴承、下法兰盘、定位气缸和定位插销,所述的复位弹簧通过弹簧固定座设于上法兰盘和下法兰盘之间,所述的连接杆通过关节轴承设于上法兰盘和下法兰盘之间,所述的定位气缸设于上法兰盘上,所述的定位插销设于定位气缸的气缸头上,所述的下法兰盘上设有定位孔,定位孔的位置和形状与定位插销相适应。
8.进一步,所述的上法兰盘和下法兰盘上均设有标准螺孔,用于其它机构的安装固定。
9.进一步,所述的复位弹簧设有三只以上,均匀分布于上法兰盘和下法兰盘之间。更进一步,每只复位弹簧等间距设置。
10.进一步,所述的连接杆设有三只以上,均匀分布于上法兰盘和下法兰盘之间。更进一步,每根连接杆等间距设置,且与每只复位弹簧等间距间隔设置。
11.进一步,所述的定位气缸为一个,对应的定位插销和定位孔设于上法兰盘和下法
兰盘的中心轴线上。
12.进一步,所述的定位气缸有三个以上,均匀设于上法兰盘上,每个定位气缸对应的定位插销和定位孔均匀设于上法兰盘和下法兰盘之间的平行垂直线上。
13.一种柔性弯折工具头,包括卸力机构、法兰座、液压缸、固定架、传感器、弯折固定头、中心轮和支撑轮,所述的卸力机构通过连接件刚性固定于法兰座上,所述的固定架与法兰座刚性固定连接,所述的液压缸设于固定架内,所述的弯折固定头与固定架的前端连接,所述的中心轮设于弯折固定头内,所述的支撑轮设于中心轮的一侧,支撑轮与液压缸的液压缸杆连接,所述的传感器设于法兰座上,用于监控和反馈液压缸杆的运动轨迹。
14.进一步,上述的柔性弯折工具头,还可以在卸力机构上设置气动快换盘,方便机械臂自动快速更换工具头。
15.一种柔性打磨工具头,包括卸力机构、法兰座和打磨施工头,所述的卸力机构通过连接件刚性固定于法兰座上,所述的打磨施工头与法兰座刚性固定连接。
16.进一步,上述的柔性打磨工具头,还可以在卸力机构上设置气动快换盘,方便机械臂自动快速更换工具头。
17.进一步,所述的卸力机构采用本专利提供的卸力机构,其反向阻力与液压缸的液压缸杆同步。当采用本专利提供的卸力机构时,上法兰盘与气动快换盘刚性连接,下法兰盘通过连接件刚性固定于法兰座上。更进一步,所述的连接件为定位止口及螺栓,将法兰座固定在下法兰盘底部。
18.进一步,所述的传感器为拉线传感器,包括活动拉线,在支撑轮上设置传感器支架,活动拉线的拉出端设于传感器支架上。
19.本发明的有益效果:
20.本发明提供的柔性弯折工具头和打磨工具头,加载了卸力机构,当液压机构承受折弯钢筋或打磨料的反作用力时,卸力机构起到即时卸力作用,大幅降低了液压缸弯折钢筋或打磨施工头打磨材料时传递到机械臂的反作用力。
21.经过已有的实践,采用本发明提供的工具头在弯曲直径32mm以内带肋钢筋时,机械臂可正常使用,满足大承载的结构力学以及抗震要求。同时打磨工具头在用直径300mm砂盘打磨松木、杉木、胶合木等曲面木材表面及直径150mm金刚砂砂盘打磨铝型材、钢焊接磨口等材质时,机械臂亦可正常使用。
22.另外,本发明提供的柔性弯折工具头,整体结构设计精巧,能应用于机械臂或其它运动机构,应对复杂曲率及形状的柔性钢筋折弯设计。特别是建造基于bim建造工艺方向的先锋造型建筑及装置,用于柔性钢筋及其它材料的折弯施工、木材及金属的打磨施工。
23.下面结合附图对本发明的具体实施方式举例说明:
附图说明
24.图1为本发明提供的柔性弯折工具头应用于机器人手臂时的整体状态参考图。
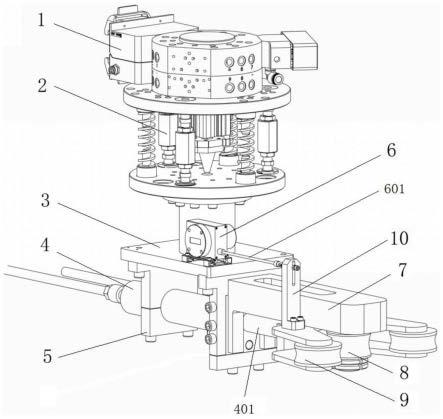
25.图2为本发明实施例提供的柔性弯折工具头立体结构示意图。
26.图3为本发明实施例提供的卸力机构立体参考图。
27.图4为本发明实施例提供的卸力机构工作原理说明图。
28.图5为本发明实施例提供的卸力机构局部轴侧图之一。
29.图6为本发明实施例提供的卸力机构剖面视图之一。
30.图7为本发明实施例提供的卸力机构局部轴侧图之二。
31.图8为本发明实施例提供的卸力机构剖视轴侧图之二。
具体实施方式
32.此处所描述的具体实施例仅仅用于解释本专利的技术方案,而非对公开技术方案的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本公开技术方案相关的部分而非全部结构。
33.在更加详细地讨论示例性实施例之前应当提到的是,实施例中提到的设备部件和/模块本身的结构如果没有详细说明,为本领域技术人员根据现有公开技术可理解或市售产品。
34.如图3、图5和图6所示,该实施例的卸力机构,包括上法兰盘201、弹簧固定座202、复位弹簧203、连接杆204、关节轴承205、下法兰盘206、定位气缸207和定位插销208,所述的复位弹簧203通过弹簧固定座202设于上法兰盘201和下法兰盘206之间,所述的连接杆204通过关节轴承205设于上法兰盘201和下法兰盘206之间,所述的定位气缸207设于上法兰盘201上,所述的定位插销208设于定位气缸207气缸头上,所述的下法兰盘206上设有定位孔209,定位孔209的位置和形状与定位插销208相适应。
35.所述的上法兰盘201和下法兰盘206上均设有标准螺孔,用于其它机构的安装固定。
36.优选的实施方案之一,所述的复位弹簧203设有三只以上,均匀分布于上法兰盘201和下法兰盘206的外围之间。更进一步,每只复位弹簧203等间距设置。
37.优选的实施方案之二,所述的连接杆204设有三只以上,均匀分布于上法兰盘201和下法兰盘206的外围之间。更进一步,每根连接杆204等间距设置,且与每只复位弹簧203等间距间隔设置。
38.优选的实施方案之三所述的定位气缸207为一个时,对应的定位插销208和定位孔209设于上法兰盘201和下法兰盘206的中心轴线上。
39.参考图2,本实施例提供的柔性弯折工具头,包括卸力机构2、法兰座3、液压缸4、固定架5、传感器6、弯折固定头7、中心轮8和支撑轮9,所述的卸力机构2通过连接件刚性固定于法兰座3上,所述的固定架5与法兰座3刚性固定连接,所述的液压缸4设于固定架5内,所述的弯折固定头7与固定架5的前端连接,所述的中心轮8设于弯折固定头7内,所述的支撑轮9设于中心轮8的一侧,支撑轮9与液压缸4的液压缸杆401连接,所述的传感器6设于法兰座3上,用于监控和反馈液压缸杆401的运动轨迹。
40.进一步,该柔性弯折工具头,还可以在卸力机构2上设置气动快换盘1,方便机械臂自动快速更换工具头。
41.当采用上述实施例提供的卸力机构时,上法兰盘201与气动快换盘1刚性连接,下法兰盘206通过连接件刚性固定于法兰座3上。优选的方案是,所述的连接件为定位止口及螺栓,将法兰座3固定在下法兰盘206底部。本专利实施例的卸力机构2,其反向阻力与液压缸4的液压杠杆401同步。
42.所述的传感器6可以选择拉线传感器,包括活动拉线601和传感器支架10,所述的
传感器支架10设于支撑轮9上,活动拉线601的拉出端设于传感器支架10上。
43.如图1和图2所示,当液压缸4通过液压油推动缸杆401由内向外伸出时,带动缸杆端部的支撑轮9,支撑轮9将钢筋绕着中心轮10压弯,从而使钢筋按机器人内置的程序设定的曲率弯曲。同时,拉线传感器6的活动拉线601随缸杆401上的传感器支架10一同伸出,达到精确伸出距离的控制。当钢筋的一端通过另外夹具固定不动后,由于钢筋需要弯曲,其材料本身会迫使液压缸4及其连接的液压缸固定架5和法兰座3会沿钢筋曲率变化进行随动,液压缸4及其它连接的液压缸固定架5在空间中会沿钢筋弯曲方向进行平面滑移运动,该滑移运动通过力传递反过来对机械臂的运动会产生影响及损伤,即机械臂与弯折工具头同步运动存在偏差问题。为抵消或释放该滑移运动的负面影响,在机械臂和液压缸之间特别设置了卸力机构2,降低施工时对机械臂反施力过大的影响。
44.卸力机构2的工作原理如图4所示。因为下法兰盘206与液压缸整体执行组件为钢性连接,当下法兰盘206不受力时,下法兰盘206的a点与上法兰盘201的a点垂直投影重合。液压缸头弯曲钢筋或其它材料时,下法兰盘206同液压缸执行组件一同旋转,下法兰盘206的a点位置随力传递作用在空间中滑移至a*点位置,受转矩m1。由于此时复位弹簧203受力变形,由b点位置弯曲至b*点位置,偏移夹角δφ。下法兰盘206通过三组连接杆204及其两端的m39x2的关节轴承205连接到上法兰盘201,上法兰盘201通过连接杆204及关节轴承传力作用,受转矩m2。m2<m1,达到柔性卸力的目的。
45.当液压缸停止钢筋或其它材料的弯折工作,复位弹簧203快速将下法兰盘206、连接杆204及关节轴承205复位,即偏移夹角δφ=0,下法兰盘206的a点与上法兰盘201的a点回到垂直对应位置。
46.液压缸在脱离钢筋后或未弯折钢筋时,卸力机构2未受力,定位气缸207带动定位插销208始终插入下法兰盘206对应的定位孔209中,完成柔性钢筋弯折工具头在空间位置的精确走位。
47.在上述的实施例中,卸力机构2只采用了一只气缸,工具头在空间走位过程中仍可沿气缸轴心旋转,对于钢筋弯折精度较低的产品可沿用一组气缸组件做定位。若弯折钢筋精度较高,工具头需要更精确走位可以如图7、如图8所示,设置三个定位气缸207,大幅提高定位精度。在上法兰盘201底面均匀设置三组定位气缸,每个定位气缸207对应的定位插销208和定位孔209均匀设于上法兰盘201和下法兰盘206之间的平行垂直线上。这样,工具头在空间中各自由度完全约束,且受力均匀,从而达到更精准的定位。
48.参考图2,在法兰座3上替换掉液压缸固定架5,连接上打磨施工头,即构成了一种柔性打磨工具头。
49.以上是对本发明的较佳实施进行了举例说明,但本发明创造并不限于所述实施例,熟悉本领域的技术人员在不违背本发明精神的前提下还可做出种种的等同变形或替换,这些等同的变形或替换均包含在本技术权利要求所限定的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1